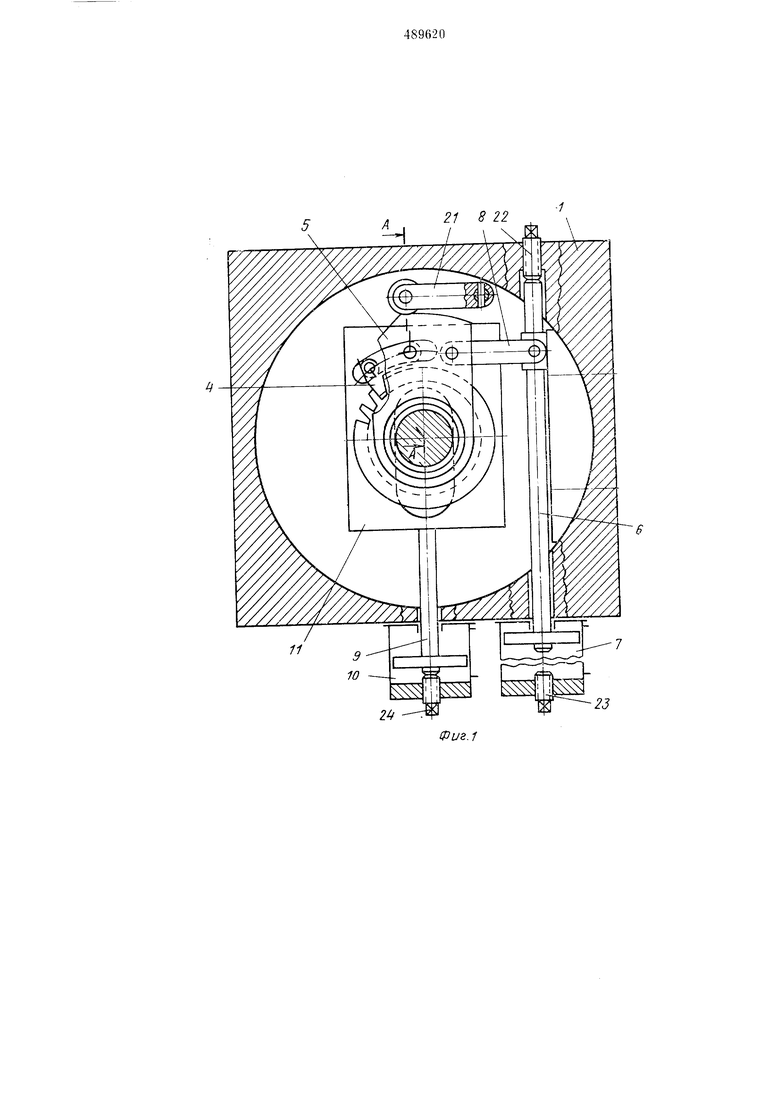
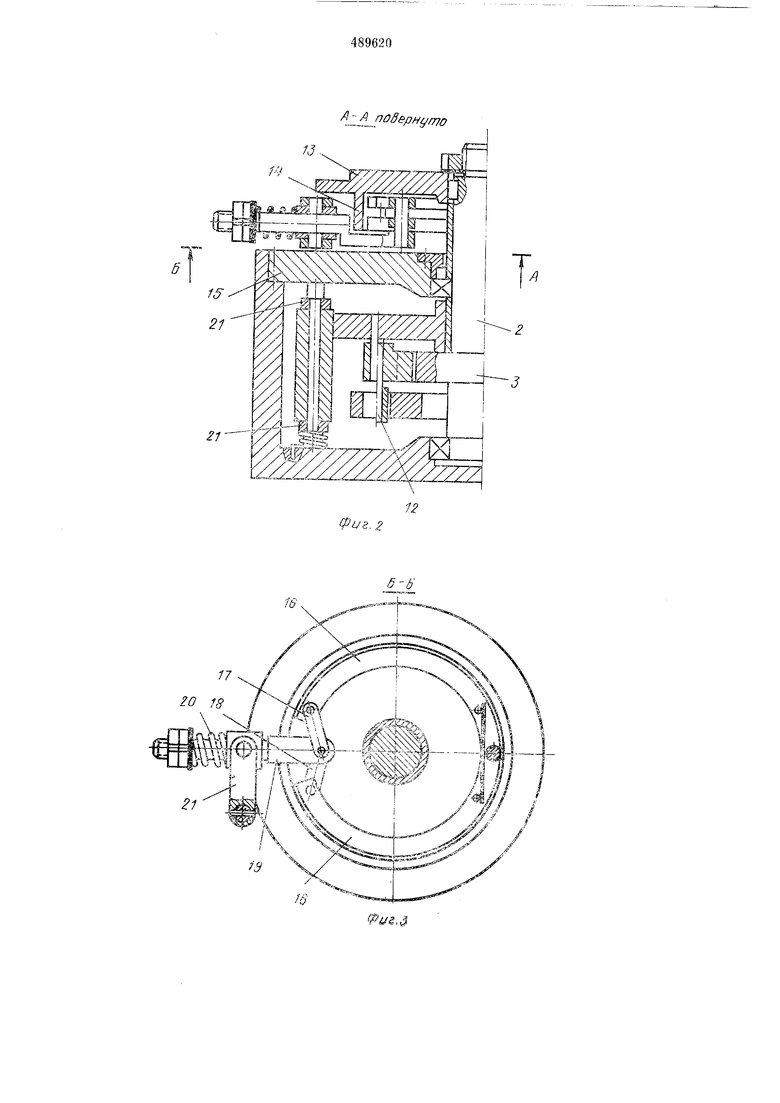
На крышке 15 корпуса 1 под планшайбой 13 расположены колодки 16 фрикционного тормоза. Колодки 16 при помош,и тяг 17, 18, 19 через пружину 20 соединены с двуплечим рычагом 21, второе нлечо которого размещено внутри корпуса 1. Для ограничения хода пневмоцилиндра 7 имеются регулируемые уноры 22 и 23, а для пневмоцилиндра 10 - упор 24.
Механизм работает следующим образом. Храповик 4 в исходном пологении вводится в зацепление с храповым колесом 3 при помощи пневмоцилиндра 10 через нланку 11, воздействующую своим пазом (копиром) на палец 12 храновика 4. Тормозные колодки 16 нрн этом отводятся. Поворот храпового колеса 3 осуществляется ппевмоцилпндром 7 через шток 6, шатуп 8, водило 5 и храповик 4. В конечном этапе хода штока 6 водило 5 воздействует па двуплечий рычаг 21, который через тяги 17, 18 н 19 прижи.мает колодки к тормозному барабану 14. Прп подходе штока 6 к упору 22 шатун 8 проходнт положение, перпендикулярное штоку 6, и таким образом отводит храповик 4 в крайнее положение. При этом храповик имеет точно фикспровапное положение (в смысле повторяемости), потому что благодаря тормозу выбираются зазоры в цепи: паправляющие штока-шток-шатун- водило-храповик-храповое колесо - вал - планшайба. После прохождения шатуиом положеиия, нерпендикулярного штоку 6, последний может иметь небольшой пробег (порядка
Iмм), отрегулируемый упором 22, однако, храповое колесо 3 обратно не отводится благодаря зазорам в обратном направлении в цепи: направляющие штока-шток-шатуп-водило-храповик-храповое колесо--вал-планшайба.
После новорота храпового колеса 3 пневмоцилиндр 10 при помоши плапки 11 воводит храповик 4 из зацепления с храповым колесом 3, а передним краем плапки 11 (упором) нажимает на рычаг 21. Таким образом, планка
IIвместо водила 5 воспринимает усилие от рычага 21.
Во время выетоя храиового колеса 3 (жестко связанного с планшайбой 13) шток 6 пневмоцилиндра 7 возвращается в исходное положение к упору 23.
Уменьшение времени новорота н фиксации илаишайбы достигается за счет того, что планшайба оказывается зафиксированной уже в конце хода штока 6 пневмоцилипдра 7 привода храпового колеса, так как фрикционный тормоз предотвращает веякое движение планП1айбы после занятия ею крайнего положения (после прохождения шатуном 8 положения, перпендикулярного штоку 6). С этого MOMeirra начинаются технологические процессы, выполняемые на автомате. одвод планки 11 1иевмоцили1гтром 10 н последующий обратньн ход ниока 6 нневмоцилиндра 7 осуществ,1яется во время выполне1гия технологических процессов.
1.Механизм нериодического новорота, включа1они- й храиовой механизм привода планшайбы, пневмоцилиндр, приводящий храповое колесо через храповик, водило и шатун, и второй пневмоцилиндр, ун)авляющий храповиком, отличающийся тем, что, с целью уменьшения времеии новорота и фиксации и новышения точности фиксации, он снабжен ф Я1кцнонным тормозом для торможения и (рнксации , связанным штоком иневмоцилиндра нривода хранового колеса в конце его хода через эластичиый элемент, на HiTOKe пневмоцилиндра уиравления храповиком установлен упор, воздейетвуюший на фрикционный тормоз для еохранения зафиксированного положения планшайбы, а оси шарннров шатуна, соедиияющего шток пневмоцилиндра нривода храпового колеса с водилом xpanoBiiKa, расположены на прямой, нерпендикулярной к оси штока в конце его хода.
2.Механизм поп. 1, о т л и ч а ю ш и и с я тем, что поверхность храповика, восиринима;оп1,ая ,1омент сон ютивления храпового колеса нри его повороте, вынолиена цилиндрической, а ось этой цилиндрической поверхности расположена на оси шарнира,
3.Механизм по пп. 1 и 2, о т л и ч а ю щ и и с я тем, что на планшайбе жестко установлен барабан, а на корпусе механизма - колодки, управляемые пнепмоцилиндрами.
5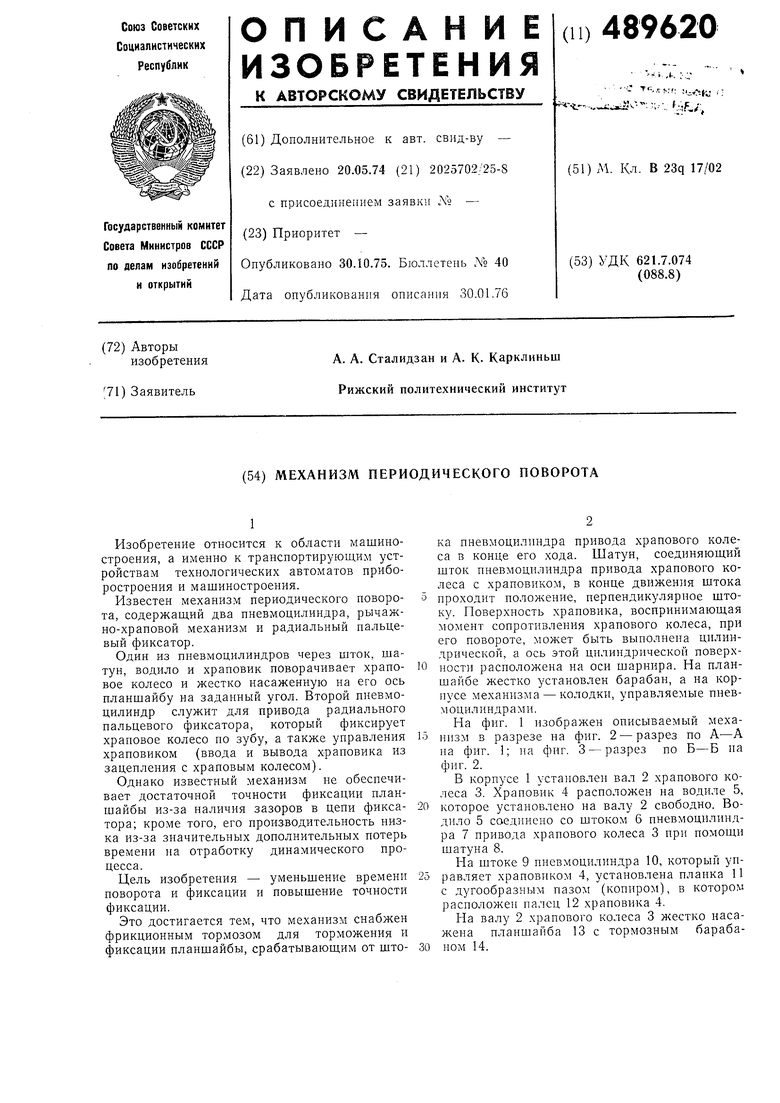
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для периодического поворота | 1977 |
|
SU747693A1 |
| Устройство для мерной резки лентына гильотинных ножницах | 1974 |
|
SU508345A1 |
| Поворотный делительный стол | 1982 |
|
SU1007923A1 |
| Устройство для укладки изделий в тару | 1982 |
|
SU1154150A1 |
| УСТРОЙСТВО для ПЕРЕВОДА МАТРИЧНЫХ МАГАЗИНОВ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНЫ | 1967 |
|
SU197620A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ЗАЗОРА В ПНЕВМАТИЧЕСКИХ ТОРМОЗАХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2374517C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ЗМЕЕВИКОВ | 1971 |
|
SU411941A1 |
| БАРАБАННЫЙ ТОРМОЗ | 1971 |
|
SU305673A1 |
| Позиционер | 1980 |
|
SU946871A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1991 |
|
RU2017647C1 |