1
Изобретение относится к трубогибочному производству.
Известны устройства для гибки змеевиков способом обкатки, которые содержат станину с расположенными на ней гибочным шаблоном, упором и водилом.
Цель изобретения - обеспечить получение змеевиков с односторонним подъемом витков.
Это достигается тем, что водило устройства снабжено кронштейном с расположенным на нем регулируемым упором и механизмом настройки, выполненным в виде качающейся планки, связанной с упором и соединен1ной посредством рычажной системы с кул,ачком храпового механизма, также смонтированного на кронштейне, храповик которого соединен тягами с подпружиненным толкателем.
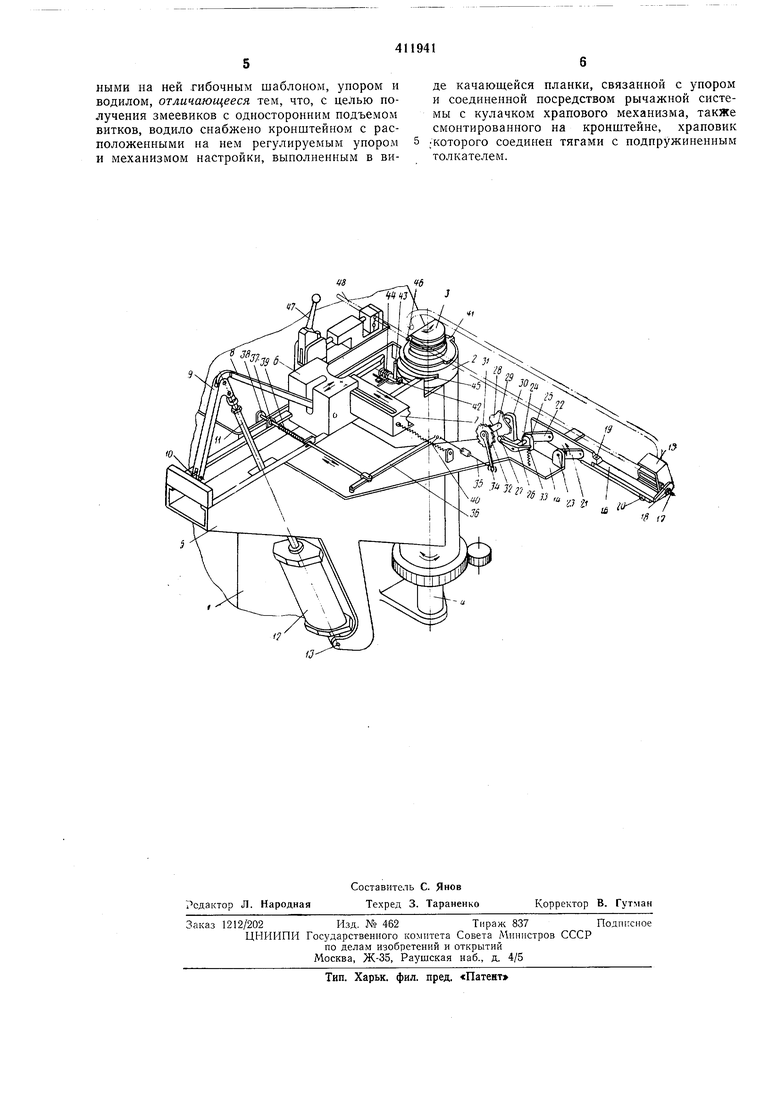
На чертеже показано предлагаемое устройство, общий вид.
Оно содержит станину /, на которой установлен с возможностью вращения в гнезде, выполненном в корпусе 2, гибочный шаблон .. На оси 4, совпадающей с осью шаблона, закреплено водило 5, несущее прижим 6, в лазу которого установлена ползушка 7. Прижим 6 расположен на направляющих водила 5 и соединен рычагами 8 н 9 с упором W. Рычаги соединяются также со штоком // пневмоцилиндра 12, закрепленного на водиле посредством шарнира 13. Ось 4 гибочного шаблона может приводиться во вращение от привода.
На водиле 5 консольно закреплен кронштейн 14, на котором установлены коробчатый упор 15 и механизм настройки. Упор 15 закреплен на планке 16 механизма настройки с возможностью перемещенпя вдоль щпильки /7 посредством гайки 18, Планка 16 установлена на оси 19 с возможностью откидывания в сторону и стопорения в рабочем положении при помощи фиксатора 20.
Планка 16 посредством рычагов 21, 22 и осей 23, 24 шарнирно соединена с кронштейном 14. Ось 24 средней частью базируется в подщиппике 25. На противополои ном конце этой оси закреплен рыча|Г 26 д; роликом 27, который взаимодействует с кулачком 28, жестко связанным с осью 29, установленной в подшипнике 30. На оси 29 закреплено также .храповое колесо 31, которое взаимодействует с подпружиненным храповиком 32. Рычаг 26
поджимается к кулачку 28 пружиной 33. Храповик 32 через рычаг 34, тяги 35 и 36 соединяется с подпружиненным рычагом 37, положение которого 37 задается упором 38 и пружиной 39. Ползушка 7 соединена с кронштейном 14 пружиной 40.
Гибочный шаблон 3 снабжен упором 41, выстунатоихим вниз.
На водиле 5 консольно закреплена ось 42, на которой установлен с возможностью вращения отсекатель 43, подпружиненный пружиной 44. Отсекатель может соприкасаться с кулачком 45 и упором 41.
На опорной плоскости гибочного шаблона выполнен зуб, который упирается в фиксатор 46 при врашенин шаблона против часовой стрелки.
На станине / устройства установлен эксцентриковый зажим 47 для закрепления трубы 48 при гибке.
Устройство работает следующим образом. Трубу-заготовку 48 устанавливают в верхний ручей гибочного шаблона 3 и продвигают в .сторону упора /5 на требуемую длину. Если конец змеевика выходит за габарит витков, перед установкой трубы 48 освобождают фик;Сатор 20, и упор 15 на оси 19 отводят в сторону, чтобы пропустить выступающий конец.
После установки трубы 48 в требуемом положении эксцентриковым зажимом 47 производят ее фиксацию. (Подачей воздуха в верхнюю полость пневмоцилиндра 12 через шток 11 и рычаги 8 к 9 прижимают прижим 6 с ползушкой 7 к гибочному шаблону 3.
При включении нривода водило 5 движется «вперед (против часовой стрелки). При этом оно обкатывает ползушку 7 вокруг шаблона 3, изгибая требуемый участок трубы 48. .Одновременно конец рычата 37 отходит от упора 38, и под действием пружины 39 выдвигается на некоторую длину, увлекая за собой через тяги 36 и 35, рыча1Г 34, который поворачивается относительно оси 29 на угол, обеспечивающий захват храповиком 32 очередного зуба на храпово.м колесе 32.
Отсекатель 43 в процессе гибки скользит по кулачку 45 и проходит упор 41 на шаблоне 3, западая за него и обеспечив зацепление для обратного хода.
Пружина 40 в процессе обкатки ползушкой 7 шаблона 3 растягивается.
Окончание процесса гибки фиксируется концевым выключателем или ручным отключателем привода.
Подачей воздуха в нижнюю полость пневмоцилиндра 12 отводят прижим 6 от шаблона 3. Под действием пружины 40 освобожденная ползушка 7 возвращается в исходное положение.
Включением привода водило 5 возвращают назад. При этом отсекатель 43, находясь в зацеплении с упором 41, вращает щаблон 5. При развороте шаблона 3 на 90° отсекатель 43 набегает на кулачок 45 и выводился из зацепления с шаблоном.
Шаблон оказывается развернутым лыской вдоль оси витка, что обеспечивает беспрепятственное снятие витка с шаблона.
При подходе водила 5 к исходному положению рычаг 37 упирается в упор 38 и сжимает пружину 39. Через тяги 36 и 35 это движение сообщается рычагу 34, который- поворачивается относительно оси 29, увлекая за собой храповик 32, а он, в свою очередь, разворачивает на один зуб храповое колесо 3 5 .и вместе с ним кулачок 28. Последний, может располагаться в двух положениях, чередуя их после каждого цикла гибки. Через ось и рычаг 22 планке 16 задаются два определенных положения. Благодаря рычагам 21 и 22 10 планка 16 приводится в движение отоси 24, соверщая плоскопараллельные качательные движения.
При положенни рычага 26, когда ролик 27 находится во впадине кулачка 28, планка
5 il6 - в нижнем положении, а закрепленный на ней упор 15 запимает наиболее отдаленное от оси гибочного шаблона 3 положение, эта позиция упора соответствует подготовке устройства под гибку трубы 48 по радиусу,
0 соответствующему нижнему ручью. При положении рычага 26, когда ролик 27 иаходится на выступе кулачка 28, плапка 16 - в верхнем положении, а закрепленый на ней упор 15 занимает наиболее приближенное к оси гибочного шаблона 3 положение, эта позиция упора соответствует подготовке устройства под гибку трубы 48 по радиусу, соответствующему верхнему ручью.
При остановке водила 5 в исходном положении срабатывает система рычагов и планка i/5 с упором .15 занимает одно из двух названных ноложений. Унор 15 разворачивают иа оси 19 в рабочее ноложение и стопорят -фиксатором 20. Эксцентриковый зажим 47 разжимают и продвигают трубу 48 до упора в нижнем ручье гибочного шаблона. При этом трубу 48 разворачивают на угол и заво,дят ранее выполненным гибом в коробчатый
„ упор 15 до соприкосновения с его вертикальной стенкой.
Шаблон 3 после снятия с него витка разворачивают до упора, выполненного на нем зуба в фиксаторе 46.
5 Далее цикл гибки повторяют. При этом в процессе паматывания трубы 48 на шаблон колено ранее выполненного гиба вытягивается из коробчатого унора 15, но, благодаря стенкам коробки, расположенным к горизонтальной плоскости под необходимым углом, 31гол между плоскостями гибов сохраняется От возможного скручивания участка трубы между гибами до конца гибки.
В ко1ще гибки колено полностью выходит
5 .из коробчатого упора 15, что обеспечивает свободный возврат водила 5.
Чередуя гибочные ручьи, один из которых обеспечивает витки подъема, а другой - горизонтальные витки с сохранением угла между плоскостями соседних тибов, изготавливают, змеевики с односторонним подъемом .Витков.
П р е д т изобретения
5 Устройство для гибки змеевиков способом обкатки, содержащее станину с установленными на ней -гибочным шаблоном, упором и водилом, отличающееся тем, что, с целью получения змеевиков с односторонним подъемом витков, водило снабжено кронштейном с расположенными на нем регулируемым упором и механизмом настройки, выполненным в виде качающейся планки, связанной с упором и соединенной посредством рычажной системы с кулачком храпового механизма, также смонтированного на кронштейне, храповик которого соединен тягами с подпружиненным толкателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки змеевиков | 1979 |
|
SU876239A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
| Устройство для гибки змеевиков из труб | 1979 |
|
SU880561A1 |
| Устройство для двусторонней гибки змеевиков | 1979 |
|
SU871892A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГИБКИ ЭЛЕМЕНТОВЗМЕЕВИКОВ | 1971 |
|
SU295590A1 |
| СТАНОК ДЛЯ ГИБКИ ТРУБ | 1970 |
|
SU265693A1 |
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Трубогибочный станок | 1984 |
|
SU1191139A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |