линдрическую поверхность Ж захвата 2. Одновременно с этим захват 3, кинематически связанный с захватом 2 через реечную шестерню 8, 9 и рейку, переместится на такую же ве.чичнну в нротивоположном нанравлении.
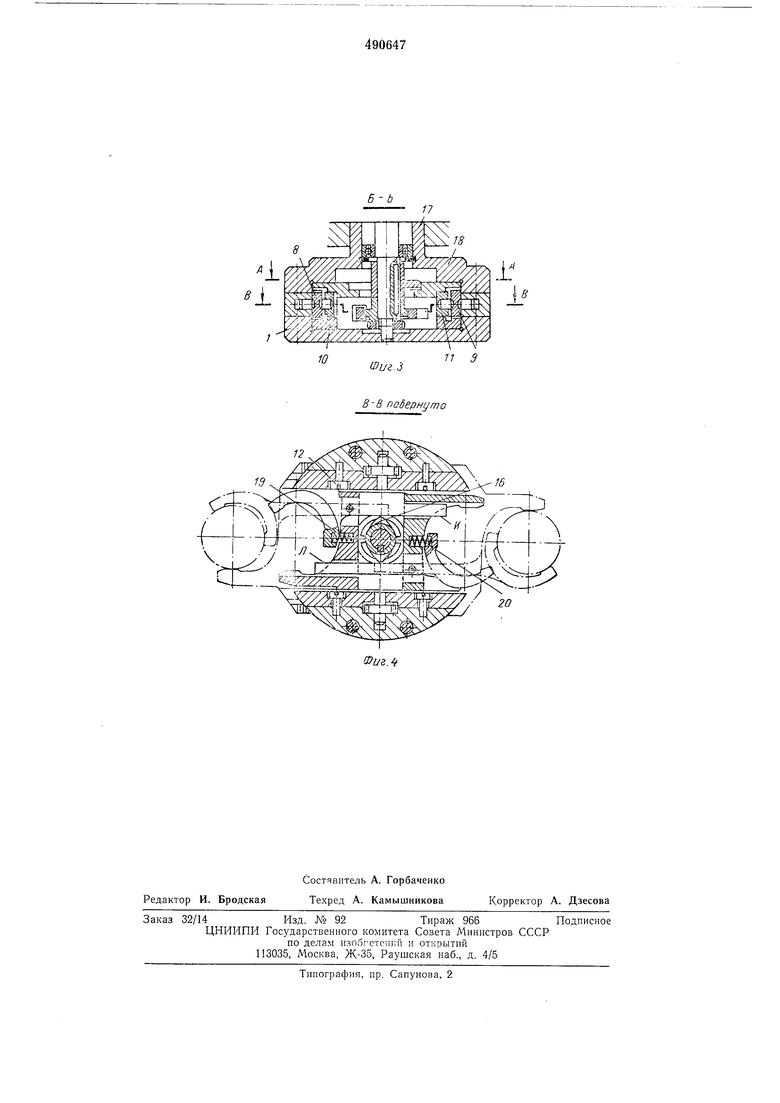
Таким образом осуществляется выдвижение захватов руки 2, 3 в корнусе 1 л ниноли 18 по иаправляюпдим 10, 11. Вместе с захватами 2, 3 выдвигаются, закрепленные на осях 6, 7, подвижные губки 4, 5, которые при помощи пружин 19, 20 прижимаются поверхностями И и Л к кулачку 16. В процессе поворота водила 13 происходит вращение кулачка 16, также жестко закрепленного на валу 15. После завершения цикла выдвижения захватов 2, 3 кулачок 16 дополнительным вращением (до полного угла поворота 180°) нри помощи своей профильной поверхности выступов производит поворот подвижных губок 4, 5 вокруг осей 6, в результате чего обеспечивается безударный зажим захватами 2, 3 и подвижными губками 4, 5 инструментальных оправок и фиксация подвил ных губок.
Последующим поворотом ведущего вала 15
на угол 180° в направлении стрелки К цикл
работы руки повторяется в обратном порядке,
т. е. разжим подвижных губок 4, 5, складывание захватов 2, 3 и фиксация последних.
Предмет изобретения
1.Двухзахватная автоматическая рука с приводом возвратно-поступательного перемещения захватов, каждый из которых выполнен в виде щарнирцо соединенных губок, о тличающаяся тем, что, с целью увеличения надежности работы и безударного схватывания объекта, рука снабжена Г-образным водилом, на конце которого смонтирован ведущий палец, воздействующий на одну из губок, и кулачком, воздействующим на другую губку захвата, причем водило и кулачок установлены на валу оривода.
2.Рука поп. 1,отличающаяся тем, что кулачок воздействует на губки обоих захватов.
« 5
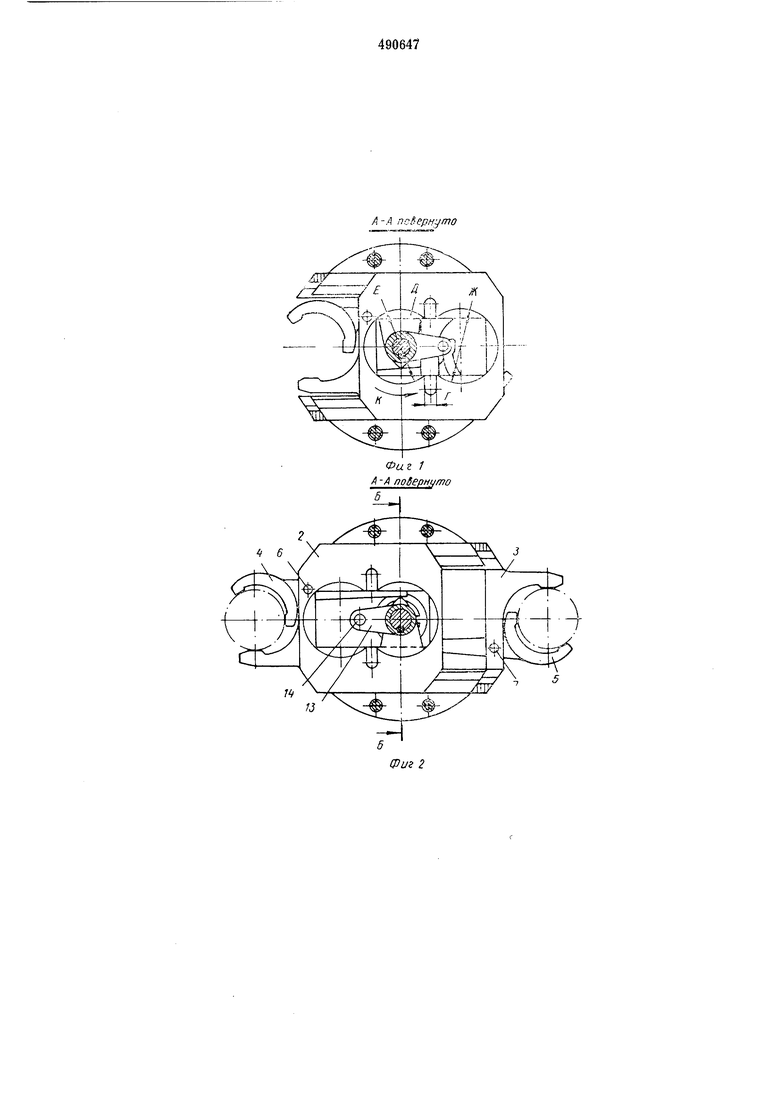
Фиг 1 А-А поберннто
12
Шиг-3
В - В подернуто

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2264907C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2376130C1 |