Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами - автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с ведущим и выходными звеньями с губками для захвата изделий, выполненный в виде многозвенного кулачково-рычажного механизма, подвижное основание и механизм поворота подвижного основания с ведущим звеном, ведущие звенья обоих механизмов кинематически связаны между собой (патент РФ №2179505, опубл. в БИПМ, 2002. - №5 - прототип).
Основным недостатком прототипа являются невысокие производительность и точность функционирования. Это связано с наличием системы гибкой связи для синхронизации движения ведущих звеньев, сравнительно большим числом подвижных элементов и кинематических пар в цепи исполнительного механизма.
Увеличение числа подвижных звеньев лимитирует частоту повторения рабочих циклов, снижая производительность, а зазоры в кинематических парах, при большом числе последних, и наличие гибких элементов не способствуют обеспечению высокой точности.
Задачей настоящего изобретения является повышение производительности и точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, ведущее звено исполнительного механизма подвижно сопряжено с выходным звеном передаточного механизма и с неподвижным фигурным профилем, выходные звенья исполнительного механизма шарнирно соединены с его ведущим звеном и кинематически связаны с выходным звеном передаточного механизма.
Поскольку всякая рабочая машина содержит, как минимум, двигательный, передаточный и исполнительный механизмы, можно видеть, что поворотное основание и механизм поворота последнего в составе прототипа представляют собой передаточный механизм. С учетом этого, в ограничительной части п.1 формулы фигурирует наличие передаточного механизма.
Ведущее звено исполнительного механизма выполнено в виде стержня, смонтированного в направляющей, выполненной в виде пустотелых призм, жестко закрепленных на выходном звене передаточного механизма, при этом направляющая включает, по меньшей мере, две соосно расположенных призмы.
Ведущее звено исполнительного механизма снабжено роликом для взаимодействия с неподвижным фигурным профилем, при этом ролик смонтирован на конце звена, а упомянутый профиль выполнен в виде криволинейного паза в теле неподвижной плиты.
Шарнирное соединение выходных звеньев исполнительного механизма с его ведущим звеном содержит палец, жестко закрепленный на свободном конце упомянутого ведущего звена.
Кинематическая связь выходных звеньев исполнительного механизма с выходным звеном передаточного механизма содержит шатуны, каждый из которых шарнирно соединен с выходным звеном передаточного механизма и соответствующим выходным звеном исполнительного механизма.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом упомянутое закрепление губок выполнено разъемным.
Комбинированный механизм удовлетворяет условию:

где W - степень подвижности механизма, W=1;
n - число подвижных звеньев: ведущий кулачок, выходное звено, ведущее звено исполнительного механизма, шатун, выходное звено, n=5;
р5 - число низших кинематических пар, р5=6;
р4 - число высших кинематических пар: сопряжения кулачок-ролик, ролик ведущего звена-фигурный профиль, р4=2.
Ведущее звено передаточного механизма выполнено в виде дискового кулачка, жестко закрепленного на валу привода, при этом кулачок сопряжен с выходным звеном посредством ролика, смонтированного на выходном звене.
Шарнирное соединение шатунов с выходным звеном передаточного механизма содержит палец, жестко закрепленный на одной из призм в направляющей для ведущего звена исполнительного механизма.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, которые обеспечивают в совокупности упрощение конструкции, повышение производительности и точности функционирования. Преимущества предлагаемого устройства в сравнении с прототипом предопределены меньшим числом подвижных звеньев и кинематических пар, а также отсутствием системы гибкой связи между ведущими звеньями передаточного и исполнительного механизмов. Заявляемое устройство содержит 5 подвижных звеньев, прототип - 8; 6 низших кинематических пар, прототип - 10. Уменьшение числа подвижных звеньев снижает энгергозатраты на реализацию процесса передачи изделий, повышает силовую работоспособность и производительность устройства. Уменьшение числа кинематических пар способствует повышению точности работы устройства.
Подвижное сопряжение ведущего звена исполнительного механизма с выходным звеном передаточного механизма исключает необходимость применения промежуточных звеньев для кинематической связи обоих механизмов. Это уменьшает число необходимых конструктивных элементов и движущихся масс. Сложное движение ведущего звена исполнительного механизма предопределило возможность шарнирной связи его выходных звеньев непосредственно с ведущим звеном. Исключена необходимость использования промежуточных звеньев между ведущим и выходными звеньями с губками для захвата изделий.
Подвижное сопряжение ведущего звена исполнительного механизма с выходным звеном передаточного механизма, выполненное посредством направляющей, составленной из пустотелых призм, закрепленных на выходном звене, является предпочтительным с точки зрения технологичности сборки, разборки и регулировки сопряжения.
Использование ролика, смонтированного на конце ведущего звена исполнительного механизма, для сопряжения этого звена с фигурным профилем является оптимальным решением для высшей кинематической пары - пары с трением качения. Выполнение фигурного профиля в виде криволинейного паза в теле неподвижной плиты обеспечивает надежное геометрическое замыкание высшей кинематической пары, образованной сопряжением ролика ведущего звена с неподвижным фигурным профилем. Альтернатива силовому замыканию.
Использование пальца для шарнирного соединения выходных звеньев исполнительного механизма с ведущим звеном последнего является простым конструктивным решением, обеспечивающим необходимую надежность и точность сопряжения звеньев.
Использование шатунов в кинематической связи выходных звеньев исполнительного механизма с выходным звеном передаточного механизма обеспечивает большую плавность и точность поворотного движения выходных звеньев с губками для захвата изделий. Включение в кинематическую связь шатунов уменьшает ошибки, возникающие при реализации функции положения и передаточных функций, определяющих закон движения выходных звенев.
Жесткое закрепление губок на выходных звеньях исполнительного механизма вызвано тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого закрепления разъемным связано с тем, что такое закрепление обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Соответствие кинематической схемы комбинированного механизма структурной формуле кинематической цепи, т.е. формуле (1), определяет работоспособность заявляемого устройства при меньшем числе подвижных звеньев и кинематических пар в сравнении с прототипом.
Выполнение ведущего звена передаточного механизма в виде кулачка принято исходя из двух преимуществ такого решения: 1) минимального числа подвижных звеньев в составе передаточного механизма (кулачка и коромысла); 2) возможности реализации предпочтительного закона движения коромысла, зависящего от профиля ведущего кулачка.
Шарнирное соединение шатунов с выходным звеном передаточного механизма посредством пальца, жестко закрепленного на одной из призм в составе направляющей для ведущего звена исполнительного механизма, обеспечивает симметричное расположение шатунов относительно ведущего звена исполнительного механизма. Симметричное расположение шатунов предопределяет симметричное (равномерное по звеньям) распределение силовой нагрузки на звенья. Это исключает перекосы в сопряжениях звеньев и способствует повышению точности работы устройства.
Предлагаемое устройство типа "рука" для передачи изделий поясняется чертежом, на котором представлена кинематическая схема устройства.
Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма 1 и исполнительного механизма 2 с губками 3 для захвата изделий, и привод 4.
Механизм 1 включает ведущее звено-кулачок 5, закрепленный на валу привода 4, выходное звено-коромысло 6, шарнирно связанное со стойкой и сопряженное с кулачком посредством ролика 7, смонтированного на коромысле.
Механизм 2 содержит ведущее звено 8, выполненное в виде стержня, подвижно сопряженного с выходным звеном передаточного механизма, выходные звенья 9 и 10 с губками 3 для захвата изделий, шарнирно связанные с ведущим звеном посредством пальца 11, жестко закрепленного на конце ведущего звена, и неподвижный фигурный профиль 12 для взаимодействия с ведущим звеном. Профиль 12 выполнен в виде криволинейного паза в теле неподвижной плиты, а на свободном конце ведущего звена 8 смонтирован ролик 13 для взаимодействия с упомянутым пазом.
Выходные звенья 9 и 10 кинематически связаны с выходным звеном передаточного механизма посредством шатунов 14 и 15, каждый из которых шарнирно соединен с выходным звеном передаточного механизма и соответствующим выходным звеном исполнительного механизма.
Подвижное сопряжение ведущего звена 8 с выходным звеном 6 выполнено посредством направляющей 16, состоящей, по меньшей мере, из двух пустотелых призм, жестко закрепленных на выходном звене. Призмы, образующие направляющую, расположены соосно одна относительно другой. Закрепление призм на выходном звене выполнено разъемным с целью возможности регулирования их соосности при сборке и наладке. Форма поперечного сечения отверстия в теле призм соответствует поперечному сечению ведущего звена 8.
На одной из призм направляющей 16 жестко закреплен палец 17 для шарнирной связи выходного звена 6 с шатунами 14 и 15.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 4 вращение кулачка 5 преобразуется в возвратно-поворотное движение коромысла 6. Посредством неподвижного фигурного профиля 12 упомянутое движение коромысла трансформируется в сложное движение ведущего звена 8 исполнительного механизма, состоящее из двух простых движений: поворотного и поступательного. При поворотном движении звена 8 шатуны 14 и 15 и выходные звенья 9 и 10 занимают фиксированное положение относительно ведущего звена, образуя с последним как бы "жесткую" систему. При поступательном движении звена 8 в направляющей 16 расстояние между пальцами 11 и 17 изменяется, при этом шатуны 14 и 15 формируют поворотное движение выходных звеньев 9 и 10 с губками 3 для захвата изделий относительно звена 8.
При наибольшем отстоянии пальцев 11 и 17 один от другого губки 3 занимают разжатое положение. Такое положение губки занимают на границах интервалов движения звеньев, одна из границ соответствует позиции "схват изделия", другая - позиции "выдача изделия".
В интервале рабочего хода устройства губки 3 занимают сжатое положение, удерживая изделие, переносимое из позиции "схват изделия" в позицию "выдача изделия". По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства. Холостой ход выполняется при сжатом положении губок, но при отсутствии изделия.
Предложенное устройство имеет, в сравнении с прототипом, более простую конструкцию, повышенную производительность, обеспечивает большую точность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод. Выходные звенья исполнительного механизма шарнирно соединены с его ведущим звеном и кинематически связаны с выходным звеном передаточного механизма. Ведущее звено исполнительного механизма подвижно сопряжено с выходным звеном передаточного механизма и с неподвижным фигурным профилем и снабжено роликом для взаимодействия с неподвижном фигурным профилем, при этом ролик смонтирован на конце звена, а упомянутый профиль выполнен в виде криволинейного паза в теле неподвижной плиты. Кинематическая связь выходных звеньев исполнительного механизма с выходным звеном передаточного механизма содержит шатуны, каждый из которых шарнирно соединен с выходным звеном передаточного механизма и соответствующим выходным звеном исполнительного механизма. Изобретение позволит повысить производительность и точность работы устройства. 8 з.п. ф-лы, 1 ил.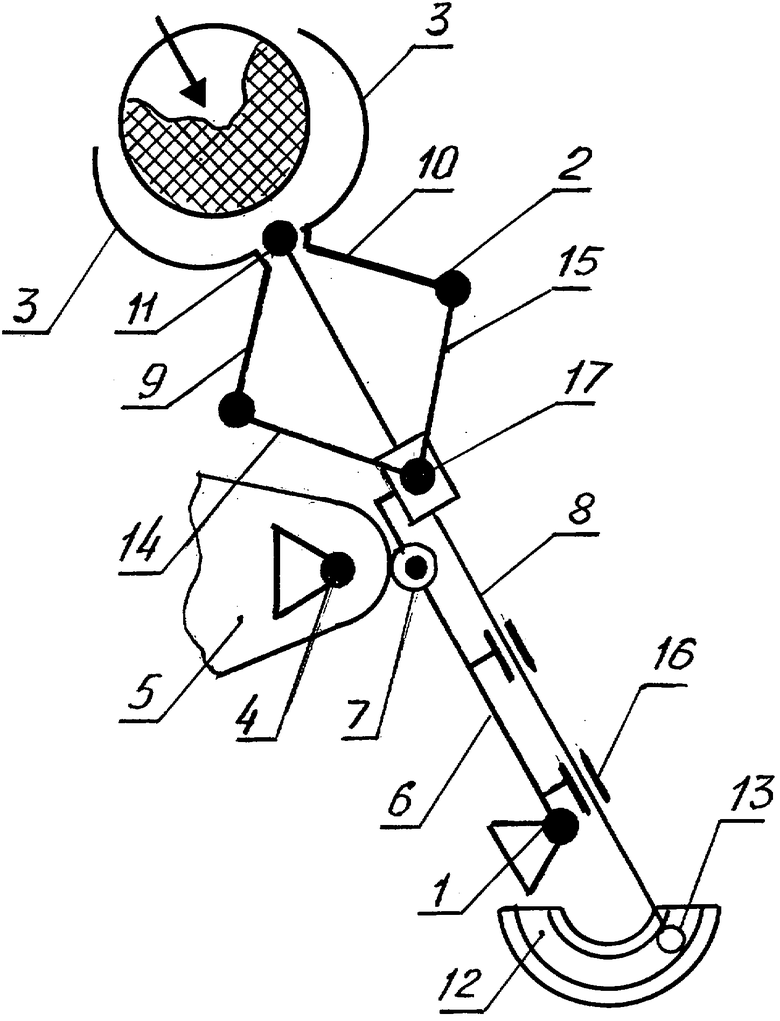
W=3·n·2p5·p4=3·5-2·6-2=1,
где W - число степеней подвижности механизма, W=1;
n - число подвижных звеньев, n=5;
р5 - число низших кинематических пар, р5=6;
р4 - число высших кинематических пар, р4=2.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| US 5885052 А, 23.03.1999. | |||

