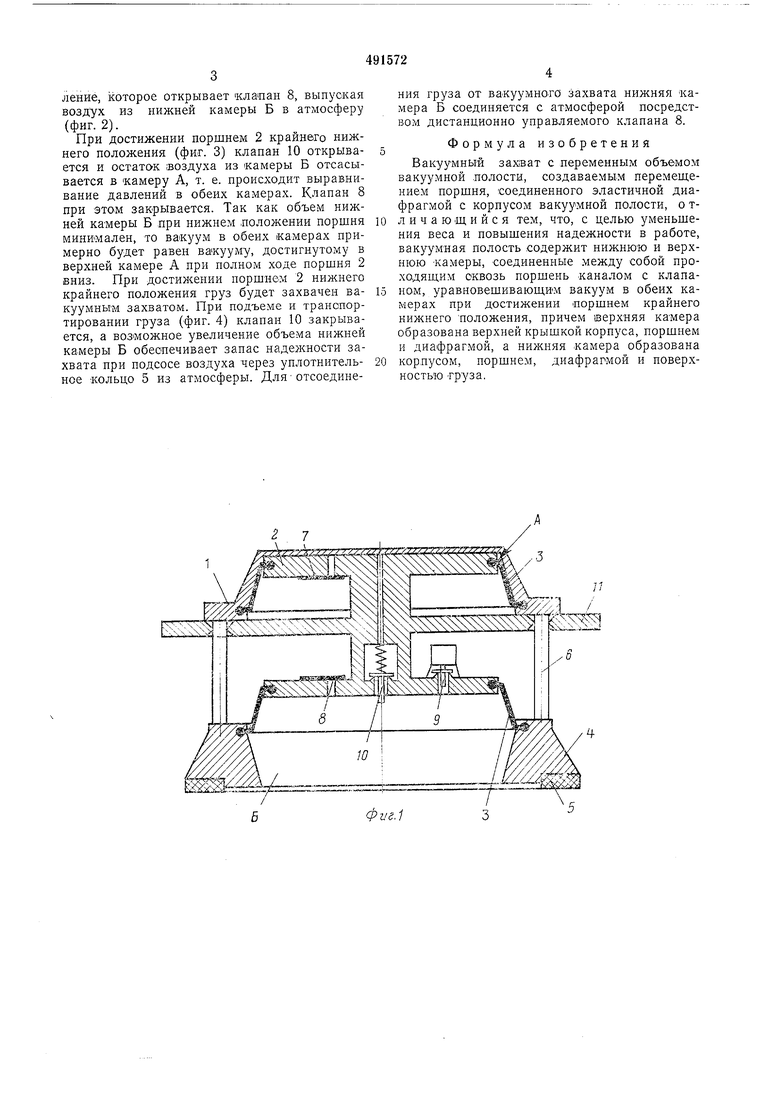
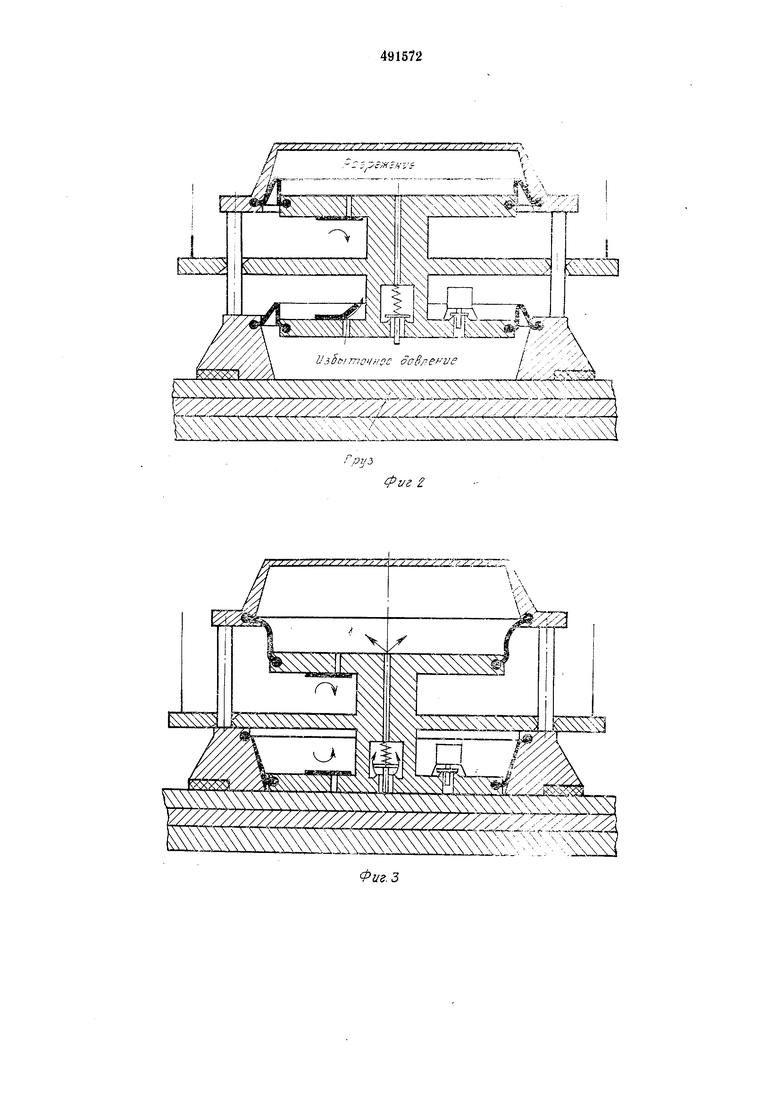
Изобретение относится IK области грузозахватных устройств. Известны вакуумные грузозахватные устройства с переменным объемом вакуумной лолости, разрежение воздуха в которой создается перемещением поршня, соединенного эластичной диафрагмой с корпусом вакуумной полости. Предлагаемый захват отличается от известных тем, что его- вакуумная полость выполнена в виде двух камер (нижней и верхней), соединенных между собой проходящим сквозь порщень каналом с клапаном, ура;в гавещивающих вакуум в обеих «авдерах при достижении норщнем крайнего нижнего положения, нричем верхняя камера образована верхней крыщкой «орлуса, порщнем и диафрагмой, а нижняя камера образована корпусом, поршнем, диафрагмой и ловерхностью груза. Такое выполнение вакуумного захвата обеспечивает уменьшение его веса и повышение надежности в работе. На фиг. 1 показан предложенный зах-ват (диаметральный разрез); на фиг. 2, 3, 4 - последовательные положения вакуумного захвата лри перемещении груза. Вакуумный захват состоит из двух камер: верхней А, образованной крышкой 1, поршнем 2 и эластичной диафрагмой 3, и нижней Б, образованной корпусом 4, поршнем 2, эластичной диафрагмой 3, уплотннтельным кольцом 5 и поверхностью поджимаемого груза. Корпус 4 жестко соединен с крышкой 1 стойка.ми 6, которые одновременно служат наиравляющи.ми для лоршня 2. Верхняя А и нижняя Б камеры соединяются с атмосферой через обратные клапаны 7 и 8. Нижняя камера Б также соединяется с атмосферой через управляемый сбрасывающий клапан 9. Между собой камеры А и Б соединяются через клапан 10, 1который срабатывает автоматически после опускания поршня 2 в крайнее нижнее лоложение. Поршень 2 вмеет лапы 11, посредством которых вак - мный захват навешивается на грузоподъемный механизм. Отверстия в лапах 11 служат для направления поршня 2 по стойке 6. Вакуумный захват работает следующим образом. В свободно подвещенно.м состоянии (фиг. 1) объем верхней камеры А минимальный. При опускании вакуумного захвата, лосле того, как уплотняющее кольцо 5 войдет ,в соприкосновение с поверхностью груза, начинается перемещение порщня 2 относительно корпуса, при этом объем верхней камеры А увеличивается и в ней создается разрежение. Клапаны 7 и 10 ори этом закрыты, объем нижней камеры Б уменьшается, создавая избыточное давление, которое открывает клапан 8, выпуская воздух из нижней камеры Б в атмосферу (фиг. 2).
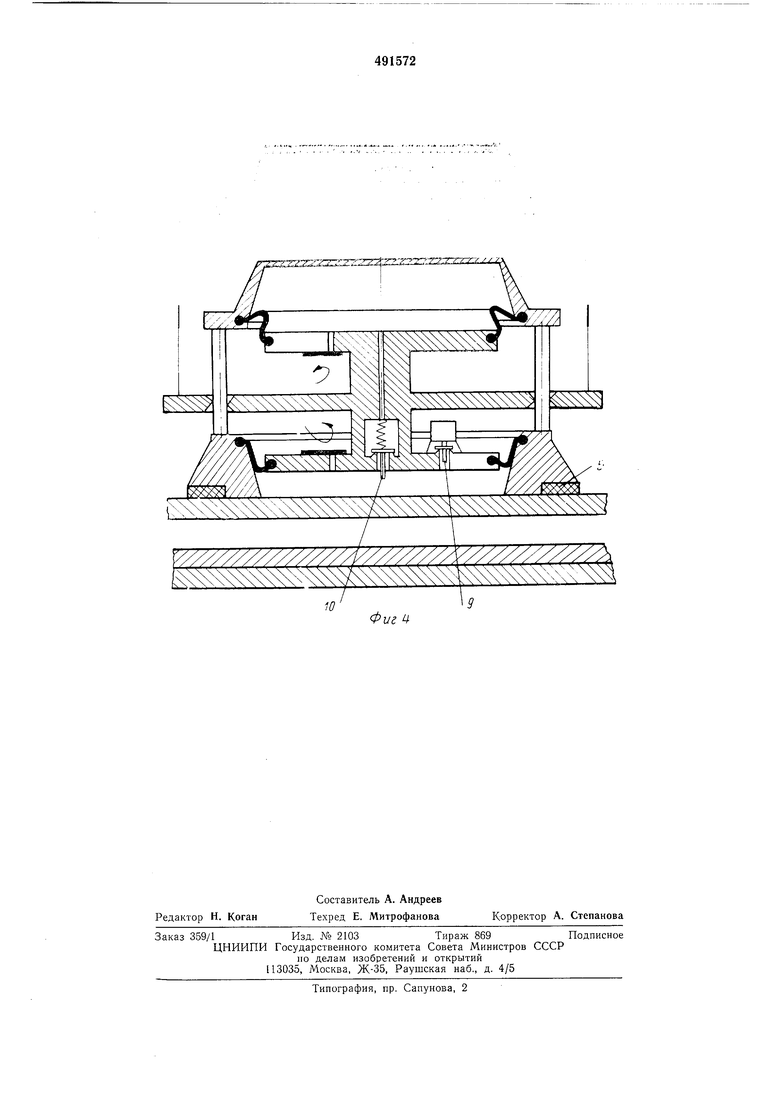
При достижении поршнем 2 крайнего нижнего положения (фиг. 3) клапан 10 открывается и остаток воздуха из камеры Б отсасывается в камеру А, т. е. происходит выравнивание давлений в обеих камерах. Клапан 8 при этом закрывается. Так как объем нижней камеры Б при нижнем лоложении поршня минимален, то вакуум в обеих камерах примерно будет равен вакууму, достигнутому в верхней камере А при полном ходе поршня 2 вниз. При достижении поршнем 2 нижнего крайнего положения груз будет захвачен вакуумным захватом. При подъеме и транспортировании груза (фиг. 4) клапан 10 закрывается, а возможное увеличение объема нижней камеры Б обеспечивает запас надежности захвата при подсосе воздуха через уплотнительное кольцо 5 из атмосферы. Для отсоединения груза от вакуумного захвата нижняя камера Б соединяется с атмосферой посредством дистанционно управляемого клапана 8.
Формула изобретения
Вакуумный зах1ват с переменным объемом вакуумной .полости, создаваемым перемещением поршня, соединенного эластичной диафрагмой с корпусом вакуумной полости, о тл и ч а ю щ и и с я тем, что, с целью уменьшения веса и повышения надежности в работе, вакуумная полость содержит нижнюю и верхнюю камеры, соединенные между собой проходяшим сквозь поршень каналом с клапаном, уравновешивающем вакуум в обеих камерах при достижении поршнем крайнего нижнего положения, причем верхняя камера образована верхней крышкой корпуса, поршнем и диафрагмой, а нижняя камера образована корпусом, поршнем, диафрагмой и поверхностью Груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Распределительный кран вакуумного захватного устройства | 1984 |
|
SU1162724A1 |
| Вакуумный захват | 1979 |
|
SU839968A1 |
| Вакуумный безнасосный захват | 1980 |
|
SU935427A1 |
| Противоподсосный распределитель вакуумного грузозахватного устройства | 1981 |
|
SU1049404A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373666A1 |
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Вакуумный эжекторный захват | 1983 |
|
SU1134521A1 |
| Газостатическая опора | 1983 |
|
SU1122534A1 |
| Вакуумный электромагнитный захват | 1984 |
|
SU1204538A1 |
| Вакуумный захват | 1982 |
|
SU1137051A1 |
г 7
.1
Фиг
I
10
Фиг Ц
