между общей заделкой одних концов струн и корпусом датчика колебания струны 1 нередаются благодаря так называемому явлению захвата струне 2. Плоскость колебаний струны 2 параллельна плоскости колебаний струны 1, а так как магнитное поле, через которое проходит струна 2, ортогонально магнитному полю, через которое проходит струна 1, то струна 2 нри своих колебаниях движется вдоль магнитных силовых линий магнитного поля системы 4, не пересекая их, так что э. д. с. в струне 2 в этом случае не возникает. При наличии угловой скорости Q, вектор которой находится в плоскости, проходящей через продольные оси струн, возникает кориолисова сила. Вектор кориолисовой силы ортогонален вектору угловой скорости Q н вектору линейной скоростн v участка струны, находящегося в магнитном поле. Из-за наличия корнолисовой силы струны начинают колебаться по эллипсу, причем эксцентриситет эллипса растет с увеличением угловой скорости Q. При колебательном двнженни но эллннсу струна 2 начинает пересекать магнитные силовые линии магнитной системы 4 и в струне 2 наводится э. д. с., пропорциональная длине участка струны, расположенного в магнитном поле, и изменению потока, т. е.
Ф
dt
Э. Д. С. наводимая в струне;
-часть длины струны, расположенная в магнитном поле;
с1Ф
-изменение магнитного потока.
dt
пронизывающего струну, в ед. времени.
т;гЛФ
Измеиенне магнитного нотока в
dt
свою очередь равно проекции линейной скорости движения струны на направление, перпендикулярное к магнитным силовым линиям, а эта проекция равна
йФ.. ,,
--,la,dt,
где uh - корнолисово ускорение, вектор которого направлен также перпендикулярно к магнитным силовым линиям и перпендикулярно к нродольной оси струны. А так как
а„ ,
где V /1ш cos сй - проекция линейной скорости струны на направление вдоль магнитных силовых линий; Q - угловая скорость; А - амплитуда колебания струны в направлении вдоль магнитных силовых линий;
0OJ - круговая частота колебания струны, то
Е -: 2AQ sin со/ - {2А1 sin w/) Q.
5 Таким образом, э. д. с., наводимая в струне 2, пропорциональна угловой скорости.
Предмет изобретения
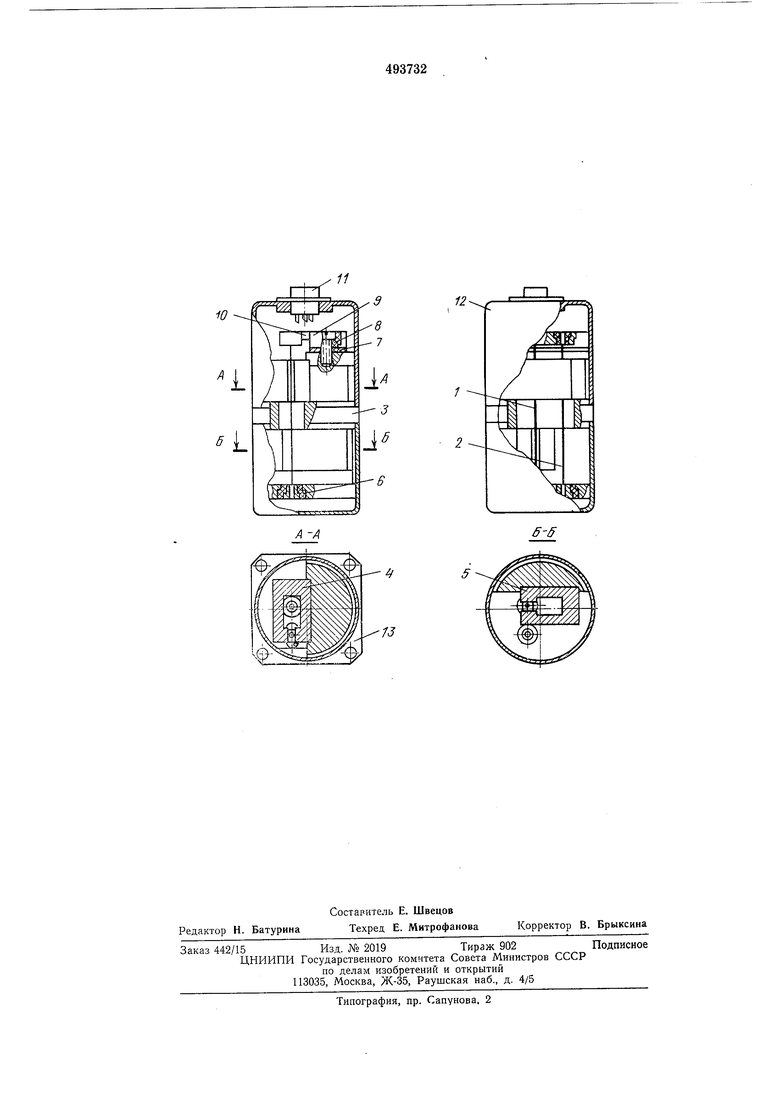
Струнный датчик угловой скорости, содержащий основную струну, корпус и две ортогональные магнитные системы, отличающийся тем, что, с целью увеличения чувствительности н точности измерения, введены упругий элемент и дополнительная струна,
5 расположенная параллельно основной струне так, что одна пара концов струн электрически изолирована друг от друга и жестко связана с корпусом датчика, а вторая пара концов электрически соединена друг с другом и связана с корпусом через упругий элемент, при этом основная струна расположена в поле первой магнитной системы, а дополнительная струна - в поле второй магнитной системы.
Ю
12-,
| название | год | авторы | номер документа |
|---|---|---|---|
| Струнный датчик угловой скорости | 1976 |
|
SU555345A1 |
| Способ управления четырехмассовым резонатором в микромеханическом гироскопе | 2023 |
|
RU2825192C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
| Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | 2017 |
|
RU2674572C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| Способ создания космических конструкций на базе динамической гибкой связи | 1991 |
|
SU1819829A1 |
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2839246C2 |
| Эллиптический поляризатор | 1990 |
|
SU1727097A1 |