Изобретение касается систем навигации самолетов, ракет, спутников и других воздушных и космических летательных аппаратов, а также управляемых снарядов.
Любой летательный аппарат, рассматриваемый как незакрепленное твердое тело, движущееся в той или иной системе отсчета, нуждается в позиционировании по шести степеням свободы. Если рассматривать движение тела в декартовой системе координат, то, независимо от того, какая система отсчета выбрана - инерциальная или неинерциальная, три из указанных степеней свободы, будут соответствовать поступательным перемещениям тела, а три других - угловым перемещениям тела.
Понятие об инерциальности системы отсчета связано с вопросами динамики движения и осложняется тем, что практически мы живем в условиях гравитации, существенно определяющей динамику и делающей нетривиальной проблему возможности практического применения декартовой системы координат в навигации. Однако в данной заявке будут рассматриваться только вопросы кинематики, которая допускает распространение декартовой системы координат на любое расстояние, игнорируя неоднородное поле гравитации и ускоренное движение летательного аппарата или окружающих его тел. При этом кинематика может рассматриваться просто как последовательность сменяющих друг друга статических положений в едином, для всей системы отсчета, времени, т.е. без релятивистских эффектов и при рассмотрении электромагнитных волн, как это делается в классической эфирной концепции, согласно которой электромагнитная волна распространяется в неподвижной среде относительно единственного наблюдателя, находящегося на борту летательного аппарата. Погрешность такого рассмотрения невелика ввиду того, что скорость полета существующих летательных аппаратов на много порядков меньше скорости распространения электромагнитных волн.
Принимая вышеуказанные условия, мы можем разделить задачу навигации на две относительно самостоятельных части - навигацию по линейным перемещениям и навигацию по угловым перемещениям. В качестве углов позиционирования можно использовать углы, измеряемые в полярной сферической системе координат, т.е. азимут, высоту места и угол поворота в поверхности сферы. В бортовых системах часто используются углы: курса, тангажа и крена. Это не меняет сути рассматриваемой проблемы.
В автономной навигации для позиционирования по линейным и угловым перемещениям требуется два или три гироскопа, что существенно усложняет конструкцию бортовой аппаратуры (см. например [1], [2]), делая ее несовместимой с малоразмерными, в частности беспилотными, летательными аппаратами.
Потребность в более простых и компактных устройствах позиционирования привела к созданию не вращающихся «гироскопов» - вибрационных, струйных, оптических и т.п. (см., например [3]). По сути они являются лишь датчиками угловой скорости, и, для определения углового перемещения, требуют интегрирования выходного сигнала. Это обусловливает накопление большой ошибки интегрирования, если время полета велико.
Решение перечисленных проблем в части позиционирования по линейным перемещениям было найдено путем создания систем позиционирования, действие которых основано на измерении времени распространения радиосигналов от базовых передающих станций (см. например [4]). Наибольшее распространение получили глобальные системы позиционирования, в которых передатчики расположены на спутниках. В принципе, эти системы позиционирования можно применить для позиционирования летательного аппарата и по угловым перемещениям, если разнести два бортовых приемника на достаточно большое расстояние, многократно превышающее погрешность линейного позиционирования. Однако это не решает проблему в отношении малоразмерных летательных аппаратов, которые становятся необходимой частью промышленной и военной инфраструктуры.
В связи с наличием вышеотмеченных проблем сохраняется использование старых способов навигации, таких как астронавигация, компас и маяки. Они дополняют новые системы навигации и используются для коррекции, а также в зонах недоступности сигналов радиосистем. Причем в качестве маяка может быть использована и радиостанция. Радиостанцию в этом случае называют радиомаяком. При этом приемник выполняет функцию радиопеленгатора, то есть датчика направления прихода радиоволн (см. [4] стр. 33). В принципе радиомаяк аналогичен оптическому маяку, в котором направление прихода электромагнитной волны определяется по ориентации волнового фронта. Для определения ориентации плоскости волнового фронта требуется определить направление максимума градиента фазы волнового поля по углу ориентации антенны или направление нулевого сигнала. При этом требуется отстройка от других источников излучения, расположенных на других направлениях поля зрения. В оптическом диапазоне волн это решается применением объектива с диаметром, многократно превышающем длину световой волны, чем обеспечивается высокое угловое разрешение оптической пеленгации. В радиодиапазоне это потребует антенны больших размеров. В противном случае, при наличии других источников излучения, градиент фазы или ноль сигнала приема радиоволны будет определен неточно. Проблема пеленгации в этом случае решается применением частотной, или иной временной, селекции сигнала маяка. Однако один маяк дает только один пеленг, т.е. лишь одно направление угловой ориентации, соответствующее двум углам углового позиционирования твердого тела. Для позиционирования по вращению вокруг направления пеленга требуется дополнительная информация. В качестве этой информации может быть использовано магнитное поле земли, т.е. магнитный компас. Однако магнитное поле неоднородно и имеет сложную не постоянную конфигурацию. Это осложняет навигацию необходимостью учета «погоды» в магнитосфере. Вместо использования магнитного поля земли можно поставить второй маяк (радио или оптический). Два пеленга на разнесенные (по углам зрения на них) маяки дадут однозначное позиционирование летательного аппарата по всем трем углам вращения.
Однако необходимость во втором маяке делает систему гораздо сложнее в части базирования инфраструктуры. Например, для сопровождения межконтинентального полета летательного аппарата потребуется иметь маяк, расположенный в океане. Если же полеты совершаются над обширной чужой территорией, то промежуточный маяк должен быть космического базирования, а следовательно - нестационарный и дорогостоящий. Проблематично также обеспечение надежной связи между маяками. Трудности возрастают при воздушном или космическом базировании двух маяков.
Целью изобретения является обеспечение возможности углового позиционирования летательного аппарата при применении лишь одного радиомаяка.
Предлагается способ определения углового положения летательного аппарата с помощью радиомаяка однопозиционного базирования. Цель достигается тем, что маяк излучает две разнесенные по двум частотным каналам линейно поляризованные радиоволны со взаимно различающимися направлениями поляризации, а установленный на борту летательного аппарата радиоприемник имеет три неподвижно установленные относительно корпуса летательного аппарата антенны с взаимно ортогональными направлениями поляризации приема, подключенные к шести соответствующим каналам приемника, соответсвующим каждому из двух каналов излучения передатчика и каждой из трех ортогональных антенн приемника. Снимаемые с выходов указанных шести каналов уровни сигнала образуют два вектора, через которые можно провести плоскость, перпендикуляр к которой проходит через позицию расположения указанных передающих антенн. А поскольку векторы поляризации сигнала в процессе распространения электромагнитной волны не меняют своей ориентации и лежат в одной плоскости с направлением оси излучающего диполя, то однозначно определяется ориентация корпуса летательного аппарата относительно направлений ориентации антенн передатчика. Таким образом, осуществляется полная привязка летательного аппарата к двум скрещенным по направлениям поляризации антеннам маяка. Т. о. единственный маяк может рассматриваться уже не как точечный или одномерный объект, а как объемное тело, относительно которого обеспечивается позиционирование летательного аппарата по всем шести степеням свободы. Таким образом, устраняется необходимость во втором маяке, необходимость в котором была обусловлена тем, что маяк с одной антенной имеет лишь одну ось поляризации и поэтому не может заменить собой объемное тело, способное выполнять функцию базы для однозначного позиционирования.
Изобретение поясняется нижеследующим описанием примеров выполнения и шестью фигурами.
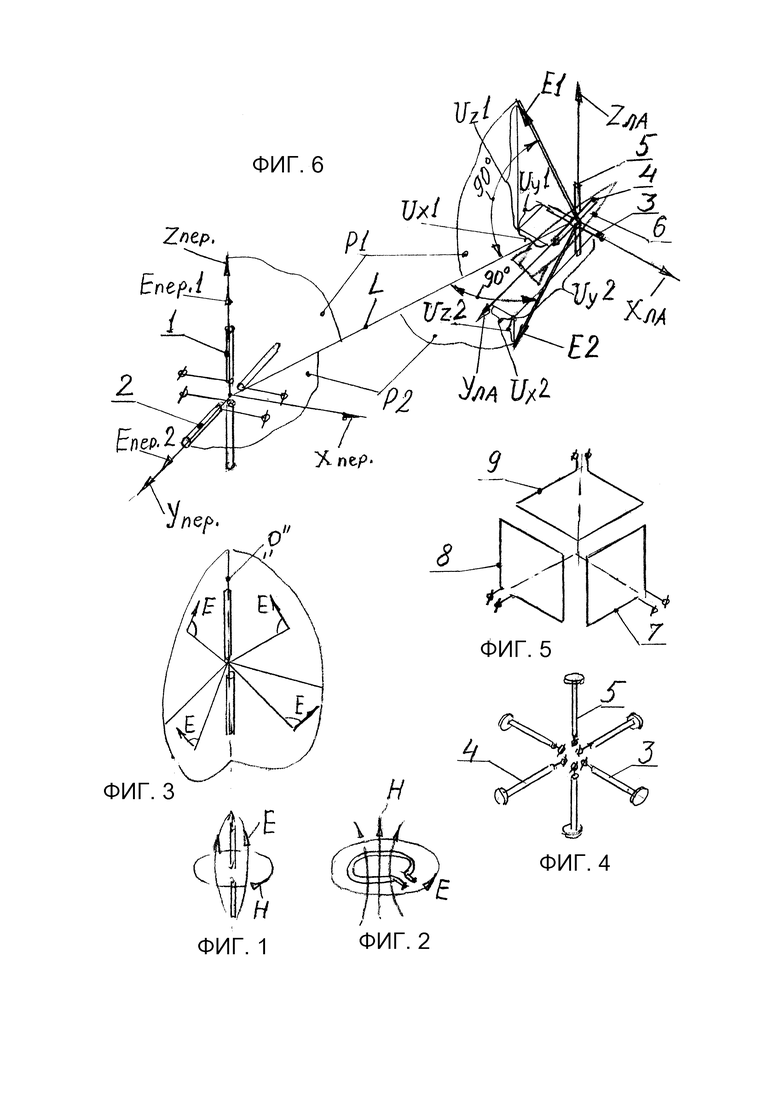
На фиг. 1 изображен вариант передающей антенны в виде электрического диполя и показана конфигурация напряженностей электрического Ε и магнитного Η полей в окрестности передающей антенны.
На фиг. 2 изображен вариант передающей антенны в виде магнитного диполя и изображена конфигурация электрического Ε и магнитного Η полей в ее окрестности.
На фиг. 3 проиллюстрирована связь вектора поляризации плоскополяризованной электромагнитной волны в различных зонах расположения приемников с направлением ориентации оси диполя передающей антенны.
На фиг. 4 изображен вариант компоновки трех приемных антенны, выполненных в виде электрических диполей с взаимно ортогональными осями.
На фиг 5 изображен вариант компоновки трех приемных антенн, выполненных в виде магнитных диполей с взаимно ортогональными осями.
На фиг. 6 изображена схема системы углового позиционирования летательного аппарата с использованием радиомаяка однопозиционного базирования.
Перечень обозначениий на чертежах:
Хпер.; Ynep.; Znep. - декартовая система координат позиции радиомаяка.
1; 2 - две дипольных передающих антенны маяка.
Εпер.1; Епер.2 - векторы ориентации осей передающих антенн 1 и 2.
Хла; Υла; Zла - декартовая система координат, связанная с летательным аппаратом.
Ε 1; Ε 2 - векторы поляризации радиосигналов передающих антенн 1 и 2 в зоне расположения летательного аппарата.
Ux1; Uy1; Uz1 - компоненты вектора поляризации Е1в бортовой системе координат.
Ux2; Uy2; Uz2 - компоненты вектора поляризации Е2в бортовой системе координат.
3; 4; 5; - три приемных антенны летатательного аппарата.
P1; Р2 - плоскости распространения векторов поляризации передающих антенн 1 и 2 (соответственно).
L - направление распространения волны.
6 - летательный аппарат.
7; 8; 9 - три приемные антенны с магнитным типом диполей.
В предлагаемом способе, чтобы расширить зону действия радиомаяков, целесообразно применять передающие антенны ненаправленного действия, например в виде диполей - электрического (фиг. 1) или магнитного (фиг. 2). У обоих типов передающих диполей векторы напряженностей электрического Ε и магнитного Η полей расположены взаимно перпендикулярно, однако вдоль оси электрического диполя располагается вектор напряженности электрического поля, а вдоль оси магнитного диполя располагается вектор магнитного поля. Т.е. в ближней зоне различие конфигурации полей электрической и магнитной дипольной антенн состоит в замене электрического поля магнитным и наоборот. Это различие сохраняется в конфигурации сферической волны на удалении от передатчика, однако определить ориентацию оси излучающего диполя и тип его (электрический или магнитный) становится невозможно. В связи с вышесказанной симметрией, в предлагаемом способе всюду вектор поляризации электромагнитной волны может определяться или по магнитному или по электрическому полю. При этом достаточно рассмотреть способ только на примере одного из типов дипольных антенн - электрическом или магнитном. Причем возможно и сочетание разных типов антенн в одной системе.
Иллюстрация процесса распространения электромагнитной волны приведена на фиг.3, где показано, что в процесс распространения вектор поляризации Ε волны сохраняет неизменной плоскость Ρ своей ориентации и ориентируется в ней перпендикулярно направлению L распространения. При этом плоскость поляризации проходит через ось «О» излучающего диполя. При этом вектор магнитной поляризации Η того же поля направлен также перпендикулярно направлению L распространения волны и перпендикулярно ориентации вектора Е. При этом, учитывая, что при рассмотрении векторов Ε и Η мы имеем дело со знакопеременными колебаниями, под направлением ориентации векторов Ε и Η мы будем всегда понимать направление соответствующей напряженности поля в условно положительной фазе колебаний. Т.е. детектирование несущего сигнала в приемнике должно производится методом синхронного (а не квадратичного) детектирования, при котором инверсия фазы несущего сигнала будет давать огибающую обратной полярности. Проблема синхронизации фазы детектора при этом решается несложно из за кратковременности цикла проведения всех операций по определению ориентации и произвольности выбора знака начального состояния фазы.
Конфигурация блока из трех приемных антенн 3, 4 и 5 выполненных в виде электрических диполей, изображена на фиг. 4. При работе в диапазоне длин волн, превышающих размеры летательного аппарата, диполи следует применять укороченные (не полуволновые). Для компенсации емкости отсеченной (по сравнению с полуволновым диполем) периферийной части на концах диполя могут быть установлены электроды, превращающие диполь в открытый конденсатор.
В случае использования для определения поляризации магнитной компоненты электромагнитной волны, антенный блок может выглядеть в виде рамок 7, 8 и 9 (фиг. 5), одновитковых или многовитковых. При этом рамки могут располагаться по граням кубика. Возможно и совмещение рамок по их центру.
В приведенных вариантах компоновки приемных антенн предполагается, что взаимное влияние ортогональных частей будет невелико из за того, что, в виду малого размера рамок по сравнению с длиной волны, локальное поле в зоне расположения антенны можно рассматривать как квазистационарный однородный поток вектора напряженности, который можно представить в виде сумы трех взаимноортогональных однородных векторных потоков, при которых каждый диполь оказывается в эквипотенциальной плоскости двух остальных потоков.
Впрочем, не исключена возможность и разнесения трех антенн на расстояние, многократно превышающее их размер.
Предлагаемый способ определения угловой ориентации летательного аппарата состоит в следующем. Антенны 1 и 2 радиомаяка (фиг. 6), выполненные например в виде диполей электрического типа, оси которых сориентированы под разными углами (например одна вертикально, а другая горизонтально), излучают плоско поляризованные волны с разными направлениями поляризации. В данном случае поляризация волны антенны 1 расположена в вертикальной плоскости, а у волны антенны 2 - в горизонтальной. В процессе распространения волны плоскость ее поляризации и направление вектора поляризации не меняются, однако направление вектора поляризации, будучи всегда перпендикулярным направлению распространения, зависит от направления распространения. Поэтому, оставаясь, например, в вертикальной плоскости, оно будет разным для разных направлений распространения (см. например фиг. 3). Так на фиг. 6, вектор поляризации Ε 1 от антенны 1 распространяется в вертикальной плоскости Р1, проходящей через ось диполя антенны 1, и приходит на позицию приемника, будучи перпендикулярным линии L распространения волны.
Аналогично антенна 2, ось диполя которой расположена горизонтально, излучает волну, вектор поляризации Е2 которой распространяется в плоскости Р2, проходящей через горизонтальную ось диполя антенны 2, распространяется в том же направлении L, оставаясь перпендикулярным этому направлению. Но здесь плоскость поляризации не остается горизонтальной, если смотреть по аналогии с вертикальной плоскостью вертикально ориентированного диполя. Почему? Здесь сказывается геоцентризм мышления. Мы придаем вертикальной оси особый статус, при котором все плоскости, проходящие через вертикальную ось, образуют пучок плоскостей, перпендикулярных горизонтальной плоскости - плоскости земли. Но все плоскости, походящие через горизонтальную ось образую пучок плоскостей, перпендикулярных одной из вертикальных стенок, которых бесконечно много, в то время как горизонтальная плоскость - т.е. поверхность земли единственная. Так что ситуация с ориентацией вектора Е2 полностью аналогична ситуации с вектором Е1, хотя психологически она воспринимается сложнее.
Таким образом, на борт летательного аппарата 6 приходят два вектора поляризации: Е1 и Е2. Соответствующие им волны передаются на разных частотах и принимаются взаимно ортогональными антеннами 3, 4 и 5. Эти радиосигналы детектируются синхронными детекторами соответствующих шести каналов приемника, на выходах которых получаются результаты синхронного детектирования, представляющие собой знакопеременные огибающие несущей частоты. Знакопеременность огибающей обусловлена фазочувствительностью синхронного детектирования, при которой инверсия фазы дает перемену знака выходного напряжения. Таким образом мы получаем на выходах детекторов напряжения Ux1, Uy1, Uz1, соответствующие проекциям вектора Е1, а также напряжения Ux2, Uy2, Uz2, соответствующие проекциям вектора Е2. Эти проекции зависят от ориентации осей соответствующих диполей приемных антенн 3, 4, 5. Легко видеть, что если корпус летательного аппарата, на которым закреплены указанные приемные антенны повернется, в любом из трех угловых направлений - по тангажу, крену или рысканию, то при этом векторы поляризации Е1 и Е2 не изменят своего положения, а проекции этих векторов изменятся, т.к. три приемные антенны, измеряющая," каждая, свои компоненты углового положения, повернутся. Таким образом, напряжения Ux1, Uy1, Uz1 и Ux2, Uy2, Uz2, отображают угловое положение летательного аппарата относительно крестообразного блока антенн 1 и 2 передатчика маяка.
Таким образом, единственный радиомаяк передает на борт всех летательных аппаратов, находящихся в зоне действия его радиоволны, радиосигнал, являющийся в то же время физическим пространственным ориентиром, относительно которого на борту, с помощью несложного устройства, представляющего собой шести канальный радиоприемник с тремя антеннами, производится позиционирование летательного аппарата по углам тангажа, курса и крена. Таким образом реализуется функция, выполняемая обычно с помощью гироскопов. И если в части навигации по перемещению удалось избавиться от гироскопов за счет применения спутниковой системы глобального позиционирования, то в части навигации по углам до сих пор отсутствует приемлемое по простоте, компактности и надежности решение. Предлагаемый способ может быть реализован в виде электронного блока размером не больше мобильного телефона. При этом антенны (примерно такого же размера) могут быть размещены под радиопрозрачным головным или носовым обтекателем ракеты или самолета. Или же - внутри стеклопластиковых аэродинамических элементов. Радиомаяк может иметь зону обслуживания, составляющую для высоколетящих аппаратов до тысячи километров. В отдельных случаях возможно базирование радиомаяка на летательных аппаратах или на плавсредствах, если снабдить плавсредво системой гиростабилизации или включить плавучую базу маяка в систему углового позиционирования, действующую по принципу радиотрансляционной сети. Причем имеется возможность углового позиционирования одного летательного аппарата относительно другого. Это может быть использовано для синхронного группового пилотирования летательных аппаратов, в частности для пилотирования стаи БПЛА или группы малоразмерных ракет перехватчиков многоэлементных целей. Таким образом, предлагаемый способ углового позиционирования снимает ограничения на уменьшение размера летательных аппаратов дальнего действия, которые в настоящее время ограничиваются главным образом блоками системы автономной навигации по угловым перемещениям.
ЛИТЕРАТУРА:
1. «Специальные технологии изготовления прецизионных узлов и элементов гироскопических приборов» Авторы: О.С. Юльметова и др. под ред. В.А. Валетова. Издание ун-т ИТМО, Санкт-Петербург, 2017 г.
2. Малеев П.И. «Новые типы гироскопов», Л, Судостроение, 1971 г.
3. <habr.com/ru/company/milandr/blog/542736/>
4. «Методы спутникового и наземного позиционирования. Перспективы развития техники обработки сигналов». Под ред. Д. Дардари, Э. Фаллетти, М. Луизе. Москва. Техносфера, 2012 г. Пер. с англ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ | 2021 |
|
RU2814291C2 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| Способ радиолокационного определения угла тангажа летательного аппарата | 2024 |
|
RU2831987C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННАЯ РАДИОМАЯЧНАЯ СИСТЕМА ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2745836C1 |
| Способ радиолокационного определения угла крена летательного аппарата | 2024 |
|
RU2838044C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ АЭРОДИНАМИЧЕСКАЯ РАСПРЕДЕЛЁННАЯ СИСТЕМА | 2018 |
|
RU2742495C2 |
| СПОСОБ РАДИОСВЯЗИ | 2010 |
|
RU2446566C1 |
| ДИСТАНЦИОННЫЙ ГЕОЛОГО-РАЗВЕДОЧНЫЙ ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС "ТАНТАЛ" | 2014 |
|
RU2568190C2 |
| СПОСОБ И СИСТЕМА АЭРОЭЛЕКТРОРАЗВЕДКИ | 2016 |
|
RU2649658C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
Изобретение относится к технике навигации самолетов, ракет, спутников, управляемых снарядов и других летательных аппаратов. Предлагается система позиционирования летательного аппарата по углам тангажа, курса и крена на основе использования свойства электромагнитной волны - сохранять ориентацию вектора поляризации в процессе распространения. В способе используется радиомаяк, содержащий две передающие антенны с различными углами ориентации излучающих диполей, а на борту летательного аппарата расположены три приемных антенны с взаимно перпендикулярной ориентацией диполей, посредством которых вектор поляризации электромагнитной волны в зоне расположения летательного аппарата раскладывается на три взаимноортогональные компоненты, соответствующие трем угловым параметрам ориентации летательного аппарата. Достигаемый технический результат заключается в возможности обеспечить позиционирование по трем углам вращения с помощью одного радиомаяка, исключив применение таких устройств, как гироскоп, магнитный компас и т.п. 6 ил.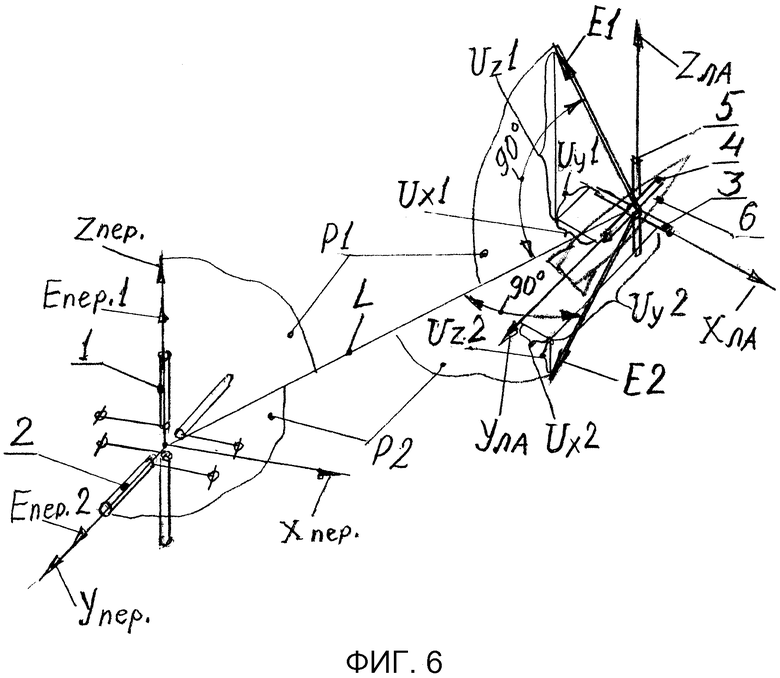
Способ определения углового положения летательного аппарата, состоящий в пеленгации излучения радиомаяка, отличающийся тем, что радиомаяк излучает две разнесенные по двум разным частотным каналам линейно поляризованные радиоволны со взаимно различающимися направлениями поляризации, а установленный на борту летательного аппарата радиоприемник имеет три неподвижно установленные относительно корпуса летательного аппарата антенны с взаимно ортогональными направлениями поляризации приема, подключенные к шести соответствующим частотным каналам приемника, уровни сигналов с выходов которых рассматриваются как два вектора, через которые перпендикулярно плоскости расположения указанных векторов проводят две плоскости, линия пересечения которых проходит через позицию расположения передающих антенн, т.е. является направлением пеленга на маяк, а плоскости, проведенные через сами векторы, определяют угловое положение летательного аппарата по вращению относительно линии пеленга, определяя таким образом вместе с дальностью до маяка, известной по данным системы навигации поступательных перемещений, всю пространственную конфигурацию системы, состоящей из передающей позиции маяка и летательного аппарата.
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2531065C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| US 20100106416 A1, 29.04.2010. | |||

