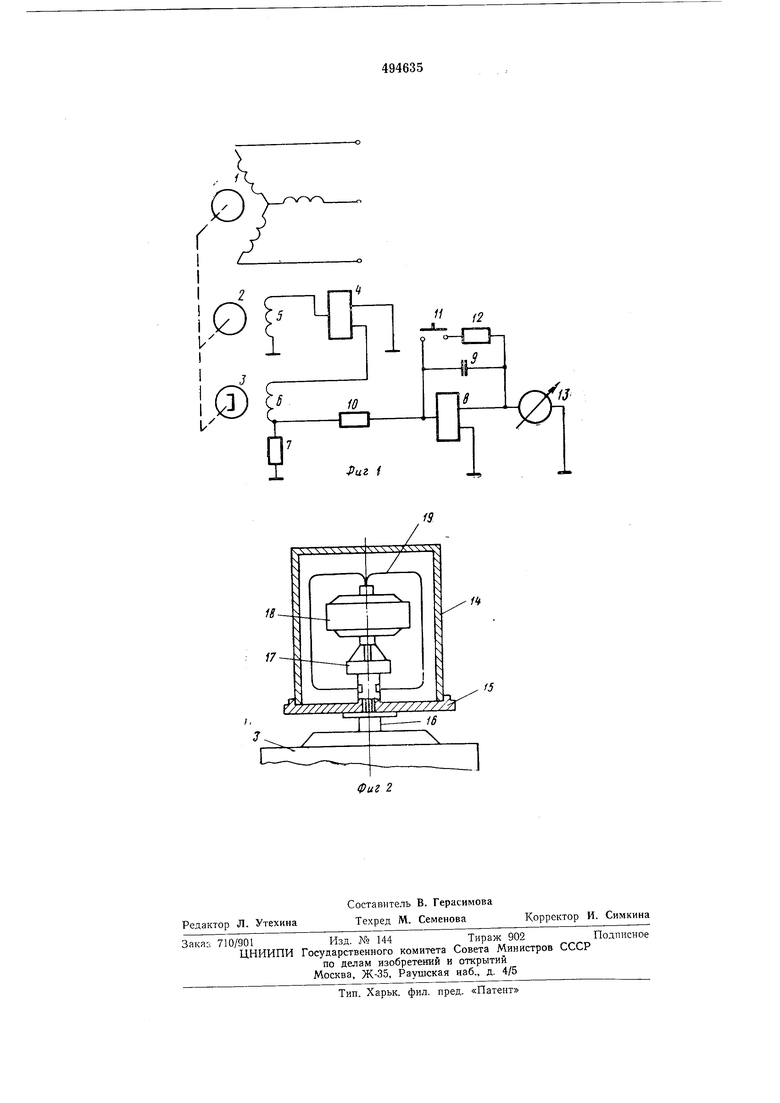
Статор г.иро.двигателя / соединен с осью ротора датчика угла 2 -и датчика мо.мента 3. Вход усилителя 4 соединен с обмоткой 5 датчика угла, а выход - с обмоткой статора 6 датчика момента, последователыно с которой включен резистор 7. К резистору 7 подключен электронный иитегратор, который состоит из Зсилителя постоянного то,ка 8 |И ннтегрирующей цени: конденсатора 9 и резистора 10. Параллельно интегрирующему конденсатору подключена орретирующая цепь, состоящая из кнопки 11 и рез1истора 12. К выходу интегратора лодключен электроизмерительный прибор 13. Съемйый отражатель 14 (фиг. 2) установлен на кронштейне 15, соединенном с осью 16 датчика момента 3. На этой же оси с номощью зажима J7 закрепляется статор гиродвигателя 18. Гиродвигатель залитывается через нроводиики 19. - Устройст.во--рЙёотйет следующим образом. .Во вреия фазгона гиродвигателя / момент .з„ -к8 пе|11(2ируется возникающим нри нротекащ и Ьбмотку 6 датчика момента, тбЙЖвдюяЁмвщемСя вследствие отклонения роторл..Датчика угла от нулевого положения. Сигнал с датчика угла усиливается усилителем 4. Ток в обмотке датчика момента, пронорциональный комненсирующему моменту, вызывает падение наПряжения на резисторе 7, которое подается через резистор 10 на интегрирующий усилитель 8. В течение времени разгона ротора гиродвигателя происходит интегрирование сигнала датчика момента, в результате чего показания измерительного прибора 13 на выходе интегратора возрастают. В конце измерения при установивщихся оборотах гиродвигателя реактивный момент статора равен нулю, и показание прибора в это врехмя пропорционально кинетическому моменту ротора гиродвигателя. Момент инерции ротора гиродвигателя может быть найден путем деления измеренного кинетического /момента «а скорость вращения ротора гиродвигателя в .конце измерения. Перед следующим измерением путем замыкания контакта 11 через резистор 12 вводится обратная связь по постоянному току, и происходит сброс показаний прибора. Предмет изобрете н и я Способ определения кинетического момента ротора гиродвигателя путем интегрирозания по времени сит.нала, прапорционального разгонному моменту ротора, отличающийся тем, что, с целью повыщения точности и сокращения времени измерения, разгонный момент ротора гиродвигателя определяют по реактивному моменту статора гиродвигателя.
1i f2
0}
иг f
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| СОВМЕЩЕННЫЙ ДАТЧИК МОМЕНТА И СМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2209393C2 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором | 2019 |
|
RU2772568C2 |
| Устройство для исследования опор гиродвигателя | 1978 |
|
SU783585A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ГИРОПЛАТФОРМЫ | 1996 |
|
RU2106601C1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1971 |
|
SU1840169A1 |
| СПОСОБ ФОРМИРОВАНИЯ ВНЕШНЕЙ ВОЛЬТ-АМПЕРНОЙ ХАРАКТЕРИСТИКИ СВАРОЧНОГО ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2189892C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
X V
itf
