1
Изобретение относится к устройствам, обеспечивающим кантование изделий на 180° на одном месте в зоне действия обрабатывающего органа.
По основному авт. св. № 312722 известен кантователь, содержащий основание, на котором установлен механизм кантования изделий, снабженный захватами и работающий от силового цилиндра.
Однако такой кантователь не может выдавать без кантования изделия, поступившие в зону его захватов в правильном положении (т. е. в положении, не требующем кантовки).
Цель настоящего изобретения - обеспечение возможности выдачи без кантования изделий, поступивших в правильном положении, при котором смещенный центр тяжести сечения изделия удален от поворотной оси захватов.
Это достигается тем, что в предлагаемоМ кантователе шестерня установлена на поворотной оси с помощью муфты предельного момента, пробуксовывающей при превышении заданного грузового момента, а свободно установленный на оси рычаг захвата снабжен вторым роликом, диаметрально противоположным первому.
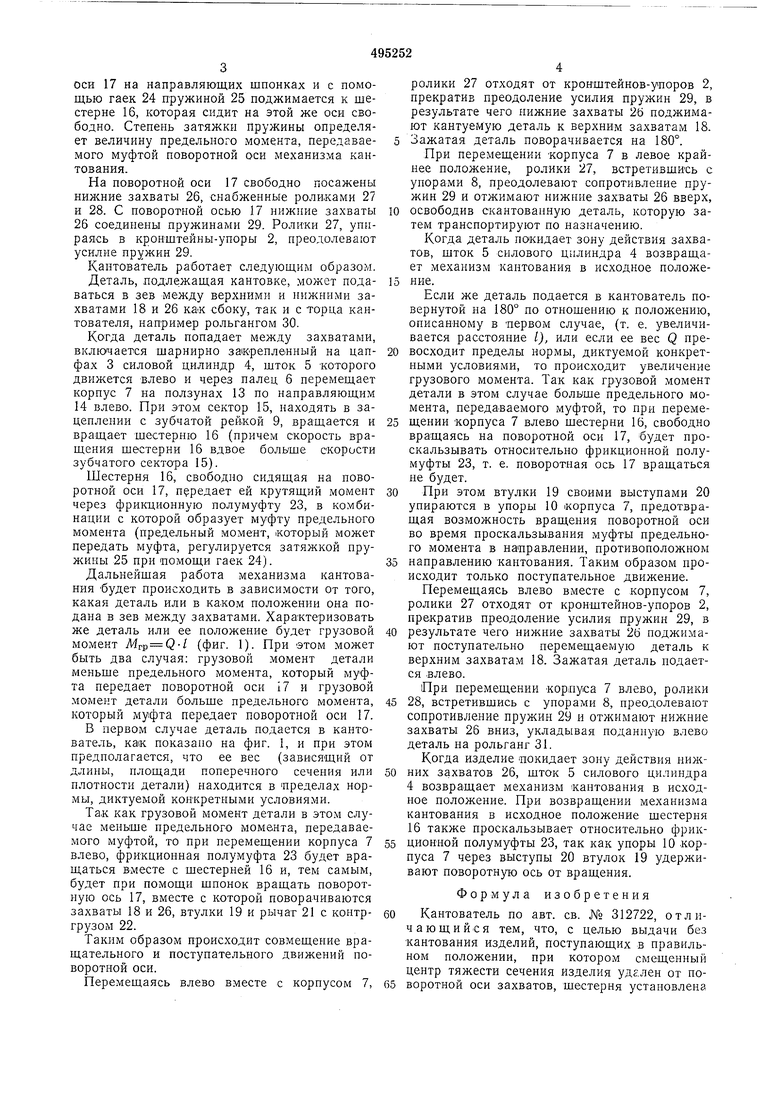
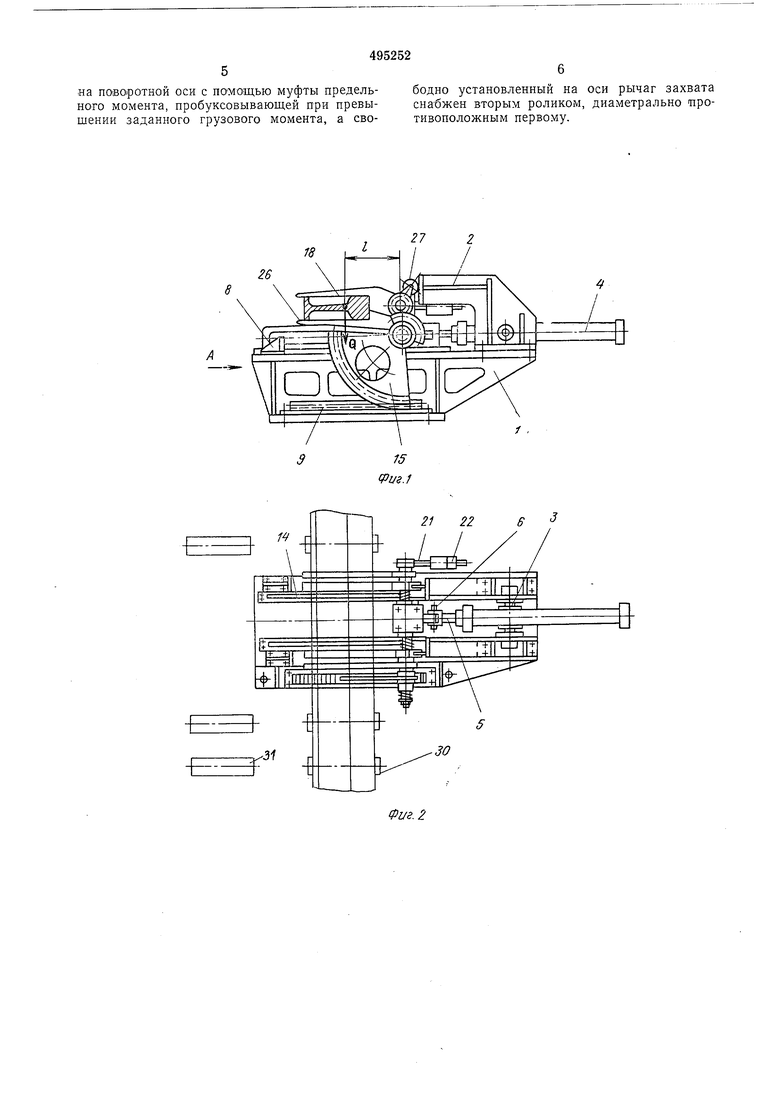
На фиг. 1 изображен описываемый кантователь, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид по стрелке А на фиг. 1; на фиг. 4 - узел 1 на фиг. 3; на фиг. 5 -
разрез по Б-Б на фиг. 3; на фиг. 6 - разрез по В-В на фиг. 3; на фиг. 7 - положение деталей механизма кантования при осуществлении кантовки изделия; на фиг. 8 - положение деталей механизма кантования при выдаче кантователем нескантованного изделия.
Кантователь содержит основание 1, кронштейны-упоры 2, в которых на цапфах 3 шарнирно закреплен силовой цилиндр 4, шток 5
которого с помощью пальца 6 шарнирно соединен с корпусом 7. На основании 1 укреплены упор 8 и зубчатая рейка 9.
.Корпус 7 имеет упоры 10 и горизонтальные неподвижные полуоси 11 и 12, на .которые
жестко насажены ползуны 13.
Ползуны 13 входят в направляющие 14, которые жестко закреплены на основании 1. На полуоси 11 корпуса 7 свободно смонтирован зубчатый сектор 15, одновременно входящий в зацепление с шестерней 16 и рейкой 9. Кроме того, на корпусе 7 свободно смонтирована поворотная ось 17, на которой при помощи шпонок жестко закреплены верхнпе захваты 18, втулки 19, имеющие выступы 20,
и рычаг 21, несущий контргруз 22, положение которого относительно поворотной оси может быть соответствующим образом отрегулировано и закреплено, например при помощи стопорного болта и контргайки. Фрикционная
полумуфта 23 смонтирована на поворотной
оси 17 на направляющих шпонках и с помощью гаек 24 пружиной 25 поджимается к шестерне 16, которая сидит на этой же оси свободно. Степень затяжки пружины определяет величину предельного момента, передаваемого муфтой поворотной оси механизма кантования.
На поворотной оси 17 свободно посажены нижние захваты 26, снабженные роли.ками 27 и 28. С поворотной осью 17 нижние захваты 26 соединены пружинами 29. Ролики 27, упираясь в кронштейны-упоры 2, преодолевают усилие пружин 29.
Кантователь работает следующим образом.
Деталь, подлежащая кантовке, может подаваться в зев между верхними и нижними захватами 18 и 26 как сбоку, так и с торца кантователя, например рольгангом 30.
Когда деталь попадает между захватами, включается шарнирно закрепленный на цапфах 3 силовой цилиндр 4, шток 5 которого движется влево и через палец 6 перемещает корпус 7 на ползунах 13 по направляющим 14 влево. При этом сектор 15, находять в зацеплении с зубчатой рейкой 9, вращается и вращает шестерню 16 (причем скорость вращения шестерни 16 вдвое больше скорости зубчатого сектора 15).
Шестерня 16, свободно сидящая на поворотной оси 17, передает ей крутящий момент через фрикционную полумуфту 23, в комбинации с которой образует муфту предельного момента (предельный момент, который может передать муфта, регулируется затяжкой пружины 25 при помощи гаек 24).
Дальнейшая работа механизма кантования будет происходить в зависимости от того, какая деталь или в каком положении она подана в зев между захватами. Характеризовать же деталь или ее положение будет грузовой момент Mrp Q-l (фиг. 1). При этом может быть два случая: грузовой момент детали меньше предельного момента, который муфта передает поворотной оси П и грузовой момент детали больше предельного момента, который муфта передает поворотной оси 17.
В первом случае деталь подается в кантователь, как показано на фиг. 1, и при этом предполагается, что ее вес (зависящий от длины, площади поперечного сечения или плотности детали) находится в пределах нормы, диктуемой конкретными условиями.
Так как грузовой момент детали в этом случае меньше предельного момента, передаваемого муфтой, то при перемещении корпуса 7 влево, фрикционная полумуфта 23 будет вращаться вместе с шестерней 16 и, тем самым, будет при помощи шпонок врашать поворотную ось 17, вместе с которой поворачиваются захваты 18 и 26, втулки 19 и рычаг 21 с контргрузом 22.
Таким образом происходит совмещение вращательного и поступательного движений поворотной оси.
Перемещаясь влево вместе с корпусом 7,
ролики 27 отходят от кронштейнов-упоров 2, прекратив преодоление усилия пружин 29, в результате чего нижние захваты 26 поджимают кантуемую деталь к верхним захватам 18. Зажатая деталь поворачивается на 180°.
При перемещении корпуса 7 в левое крайнее положение, ролики 27, встретившись с упорами 8, преодолевают сопротивление пружин 29 и отжимают нижние захваты 26 вверх,
освободив скантованную деталь, которую затем транспортируют по назначению.
Когда деталь покидает зону действия захватов, шток 5 силового цилиндра 4 возвращает механизм кантования в исходное положение.
Если же деталь подается в кантователь повернутой на 180° по отношению к положению, описанному в первом случае, (т. е. увеличивается расстояние /), или если ее вес Q превосходит пределы нормы, диктуемой коикретиьши условиями, то происходит увеличение грузового момента. Так как грузовой момент детали в этом случае больше предельного момента, передаваемого муфтой, то при перемещении корпуса 7 влево шестерни 16, свободно вращаясь на поворотной оси 17, будет проскальзывать относительно фрикционной полумуфты 23, т. е. поворотная ось 17 вращаться не будет.
При этом втулки 19 своими выступами 20 упираются в упоры 10 корпуса 7, предотвращая возможность вращения поворотной оси во время проскальзывания муфты предельного момента в направлении, противоположном
направлению кантования. Таким образом происходит только поступательное движение.
Перемещаясь влево вместе с корпусом 7, ролики 27 отходят от кронштейнов-упоров 2, прекратив преодоление усилия пружин 29, в
результате чего нижние захваты 26 поджимают поступательно перемещаемую деталь к верхним захватам 18. Зажатая деталь подается влево. При перемещении корпуса 7 влево, ролики
28, встретившись с упорами 8, преодолевают сопротивление пружин 29 и отжимают нижние захваты 26 вниз, укладывая подан1 ую влево деталь па рольганг 31.
Когда изделие покидает зону действия пижних захватов 26, шток 5 силового цилиндра 4 возвращает механизм кантования в исходное положение. При возвращении механизма кантования в исходное положение шестерня 16 также проскальзывает относительно фрикционной полумуфты 23, так как упоры 10 корпуса 7 через выступы 20 втулок 19 удерживают поворотную ось от вращения.
Формула изобретения
Кантователь по авт. св. № 312722, отличающийся тем, что, с целью выдачи без кантования изделий, поступающих в правильном положении, при котором смещенный центр тяжести сечения изделия удглен от поворотной оси захватов, шестерня установлена 56
на поворотной оси с помощью муфты предель- бодно установленный на оси рычаг захвата ного момента, пробуксовывающей при правы- снабжен вторым роликом, диаметрально отрошении заданного грузового момента, а сво- тивоположным первому.
495252 
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для пневматического транспортирования грузов в контейнерах или контейнерных составах | 1972 |
|
SU495251A1 |
| Подвесной захват-кантователь | 1972 |
|
SU439457A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Кантователь длинномерного проката | 1984 |
|
SU1217518A1 |
| Устройство для кантования и загрузки многоместного транспортно-пускового контейнера в вертикальную пусковую установку | 2022 |
|
RU2788549C1 |
| Кантователь | 1972 |
|
SU438517A1 |
| Устройство для кантования деталей | 1980 |
|
SU1122590A1 |
| Захват-кантователь | 1985 |
|
SU1341143A1 |
| Кольцевой кантователь | 1986 |
|
SU1362603A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
18
26
А
/ ,
/J Vua.f
