15
20
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам, и может быть использовано для перегрузки штучных грузов, а именно железобетонных изделий, для которых необходима операция кантования.
Целью изобретения является упрощение конструкции за счет исключения сложных в изготовлении зубчатых колес редуктора.
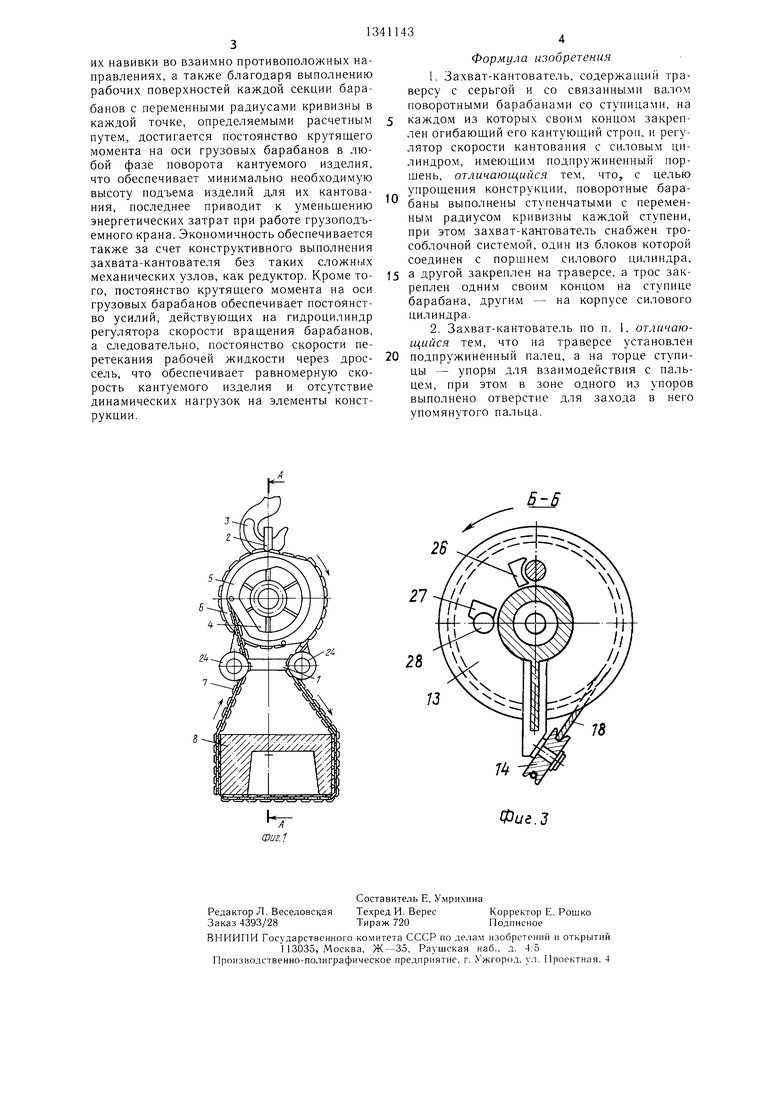
На фиг. 1 изображен захват-кантователь, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б - Б на фиг. 2.
Захват-кантователь включает несущую траверсу 1 с серьгой 2 для навещивания на крюк подъемного крана. На концах траверсы 1 установлены с возможностью вращения грузовые барабаны 4, состоящие из двух ступеней 5 и 6. Концы кантующих строп 7, предназначенных для схватывания изделия 8, закреплены соответственно на ступенях 5 и б с возможностью навивки во взаи.мно противоположных направлениях.
Регулятор скорости вращения барабанов содержит гидроцилиндр 9 с размещенными внутри него поршнем 10 и штоками 11 и 12, ступицу 13, неподвижно закрепленную на 25 ступени 6 барабана 4, блок 14, закреп- .пенный на траверсе 1 посредством оси 15, и блок 16, закрепленный посредством оси 17 на штоке 12.
Корпус гидроцилиндра 9 неподвижно закреплен на траверсе 1.
Замедлитель вращения барабанов имеет трос 18, огибающий блоки 14 и 16 и закрепленный одним концом на ступице 13, а другим - на траверсе 1.
На щтоке 12 гидроцилиндра 9 установлена возвратная пружина 19. Рабочие по- 35 лости 20 и 21 гидроцилиндра 9 сообщены между собой через дроссель 22 и через параллельно ему включенный обратный клапан 23.
На траверсе 2 смонтированы отклоняющие ролики 24, предназначенные для обеспечения постоянного охвата кантуемого изделия стропами в процессе кантования, и пружинный фиксатор 25. На ступице 13 установлены упоры 26 и 27 и выполнено
Захват-кантователь работает следующим образом.
Кантуемое изделие 8 стропится стропами 7. Далее крюком 3 грузоподъемного крана осуществляется подъем захвата-кан- 5 тователя вместе с изделием 8. Нод действием веса груза в ветвях строп 7 возникают усилия, которые передаются на грузовые барабаны 4, в результате чего возникает крутящий момент, обеспечивающий 10 вращение барабанов, а следовательно, и кантование изделия. Величина усилий, возникающих в стропах, меняется в процессе кантования и зависит от геометрии изделия и расположения его центра тяжести. Однако величина крутящ,его момента в процессе кантования изделия остается постоянной заданной величиной за счет того, что рабочие криволинейные поверхности каждой ступени выполнены с такими переменными радиусами кривизны в каждой точке, при которых величина суммарного .момента усилий в стропах каждого барабана относительно оси их вращения в каждой фазе поворота кантуемого изделия, определяемая разностью произведений величины усилия в нисходящей ветви стропы 7 на ее плечо и величины усилия в восходящей ветви на ее плечо, остается постоянной заданной величиной.
Для обеспечения плавного, без рывков и ускорений, кантования изделий используется 30 регулятор скорости враидения барабанов, в процессе работы которого при кантовании изделия 8 трос 18 наматывается на вращающуюся одновременно с барабана.ми сту- ницу 13 и, воздействуя посредством блоков 14 и 16 на шток 12, перемендает его влево {по фиг. 1). Пружина 19, размещенная на Н1токе 12, сжимается, а рабочая жидкость из полости 20 гидроцилиндра 9 через дроссель 22 перетекает с постоянной скоростью в полость 21.
40
По окончании процесса кантования изделия 8 упор 27 катушки 13 касается фиксатора 25 и последний входит в отверстие 28, после чего вращепие барабанов прекращается. Далее краном опускают захотверстие 28 под фиксатор 25. Грузовые 45 ват-кантователь, снимают стропы 7 с издебарабаны связаны между собой валом 29. Рабочие поверхности ступеней 5 и 6 грузовых барабанов 4 выполнены криволинейными, при этом радиусы кривизны в каждой точке криволинейной поверхности секций
ЛИЯ 8, фиксатор 25 выводят из отверстия 28, и грузовые барабаны через вал 29 под действием пружины 19 через трос 18 и катушку 13 поворачиваются в исходное положение до соприкосновения фиксатора 25
выбираются расчетным путем и определяют- 50 упором 26. При этом рабочая жидкость
из полости 21 гидроцилиндра 9 перетекает в полость 20 через обратный клапан 23. л1алее цикл работы захвата-кантователя повторяется.
ся исходя из того, что разность произведений величины усилия в нисходящей ветви стропы 7 на ее плечо относительно оси барабана и величины усилия в восходящей ветви стропы 7 на ее плечо относительно той же оси в каждой фазе поворота кантуемого изделия должна быть максимально приближена к постоянной заданной величине.
55 Таким образом, благодаря выполнению каждого грузового барабана захвата-кантователя двухступенчатым с закрепленными на ступенях концами строп с возможностью
Захват-кантователь работает следующим образом.
Кантуемое изделие 8 стропится стропами 7. Далее крюком 3 грузоподъемного крана осуществляется подъем захвата-кан- тователя вместе с изделием 8. Нод действием веса груза в ветвях строп 7 возникают усилия, которые передаются на грузовые барабаны 4, в результате чего возникает крутящий момент, обеспечивающий вращение барабанов, а следовательно, и кантование изделия. Величина усилий, возникающих в стропах, меняется в процессе кантования и зависит от геометрии изделия и расположения его центра тяжести. Однако величина крутящ,его момента в процессе кантования изделия остается постоянной заданной величиной за счет того, что рабочие криволинейные поверхности каждой ступени выполнены с такими переменными радиусами кривизны в каждой точке, при которых величина суммарного .момента усилий в стропах каждого барабана относительно оси их вращения в каждой фазе поворота кантуемого изделия, определяемая разностью произведений величины усилия в нисходящей ветви стропы 7 на ее плечо и величины усилия в восходящей ветви на ее плечо, остается постоянной заданной величиной.
Для обеспечения плавного, без рывков и ускорений, кантования изделий используется регулятор скорости враидения барабанов, в процессе работы которого при кантовании изделия 8 трос 18 наматывается на вращающуюся одновременно с барабана.ми сту- ницу 13 и, воздействуя посредством блоков 14 и 16 на шток 12, перемендает его влево {по фиг. 1). Пружина 19, размещенная на Н1токе 12, сжимается, а рабочая жидкость из полости 20 гидроцилиндра 9 через дроссель 22 перетекает с постоянной скоростью в полость 21.
По окончании процесса кантования изделия 8 упор 27 катушки 13 касается фиксатора 25 и последний входит в отверстие 28, после чего вращепие барабанов прекращается. Далее краном опускают захват-кантователь, снимают стропы 7 с издеЛИЯ 8, фиксатор 25 выводят из отверстия 28, и грузовые барабаны через вал 29 под действием пружины 19 через трос 18 и катушку 13 поворачиваются в исходное положение до соприкосновения фиксатора 25
упором 26. При этом рабочая жидкость
55 Таким образом, благодаря выполнению каждого грузового барабана захвата-кантователя двухступенчатым с закрепленными на ступенях концами строп с возможностью
их навивки во взаимно противоположных направлениях, а также благодаря выполнению рабочих поверхностей каждой секции барабанов с переменными радиусами кривизны в каждой точке, определяемыми расчетным путем, достигается постоянство крутяш.его момента на оси грузовых барабанов в любой фазе поворота кантуемого изделия, что обеспечивает минимально необходимую высоту подъема изделий для их кантования, последнее приводит к уменьшению энергетических затрат при работе грузоподъемного крана. Экономичность обеспечивается также за счет конструктивного выполнения захвата-кантователя без таких сложных
механических узлов, как редуктор. Кроме то-15 а другой закреплен на траверсе, а трос закго, постоянство крутящего момента на осиреален одним своим концом на ступице
грузовых барабанов обеспечивает постоянст-барабана, другим - на корпусе силового
во усилий, действующих на гидроцилиндрцилиндра.
регулятора скорости вращения барабанов,2. Захват-кантователь по п. 1, отличаюа следовательно, постоянство скорости пе-щийся тем, что на траверсе установлен
ретекания рабочей жидкости через дрос-20 подпружиненный палец, а на торце ступисель, что обеспечивает равномерную ско-цы - упоры для взаимодействия с пальрость кантуемого изделия и отсутствиецем, при этом в зоне одного из упоров
динамических нагрузок на элементы конст-выполнено отверстие для захода в него
рукции.упомянутого пальца.
Формула изобретения
1. Захват-кантователь, содержащий траверсу с серьгой и со связанными валом поворотными барабанами со ступицами, на каждом из которых своим концом закреплен огибающий его кантующий строп, и регулятор скорости кантования с силовым цилиндром, имеющим подпружиненный поршень, отличающийся тем, что, с целью упрощения конструкции, поворотные барабаны выполнены ступенчатыми с переменным радиусом кривизны каждой ступени, при этом захват-кантователь снабжен тро- соблочной системой, один из блоков которой соединен с поршнем силового цилиндра.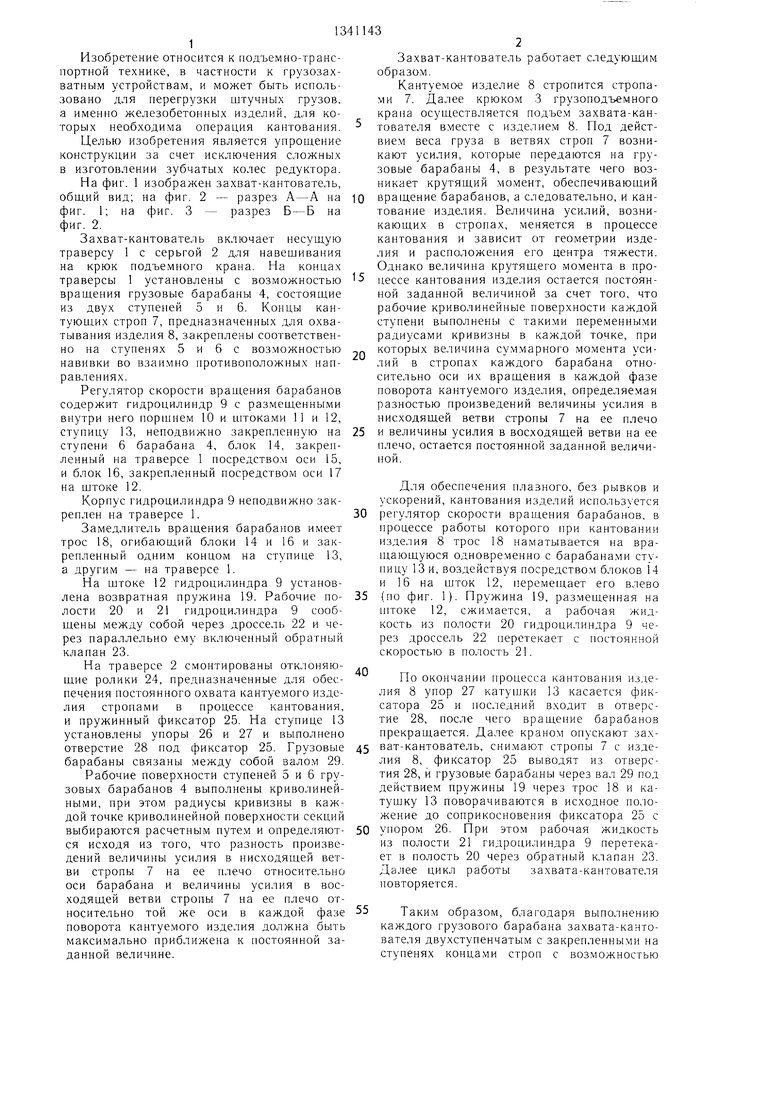
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1978 |
|
SU844541A1 |
| Захват-кантователь | 1987 |
|
SU1518270A1 |
| Крановый захват-кантователь | 1986 |
|
SU1386536A1 |
| Кантователь для установки корпусов судов под сварку | 1986 |
|
SU1388244A2 |
| Грузозахватное устройство | 1989 |
|
SU1749149A1 |
| Захват-кантователь н.н.кукулевского | 1976 |
|
SU567656A1 |
| Захват-кантователь | 1971 |
|
SU1141065A1 |
| Подвесной захват-кантователь | 1972 |
|
SU439457A1 |
| КАНТОВАТЕЛЬ ГРУЗА | 1967 |
|
SU223287A1 |
| Кантователь | 1981 |
|
SU998288A1 |
Изобретение относится к подъемным устройствам, в частности к захватам- кантователям, применяемым для перегрузки штучных железобетонных изделий, например тюбингов, для которых необходима операция кантования, и позволяет повысить экономичность захвата-кантователя путем упрощения конструкции за счет исключения редуктора. Захват-кантователь содержит траверсу 1 с серьгой 2 для навешивания на крюк 3 грузоподъемного устройства, грузовые вращающиеся ступенчатые барабаны 4 с кантующими стропами, которые установлены в траверсе и связаны между собой валом 29. Каждый грузовой барабан 4 выполнен ступенчатым и на каждой ступени 5 и 6 закреплен один из концов кантующей стропы 7 с возможностью навивки во взаимно противоположных направлениях. Рабочие поверхности ступеней грузовых барабанов выполнены с переменным радиусом кривизны исходя из условия обеспечения постоянства величины суммарного момента усилий в стропах каждого барабана относительно оси их вращения в любой фазе поворота кантуемого изделия. « (Л СО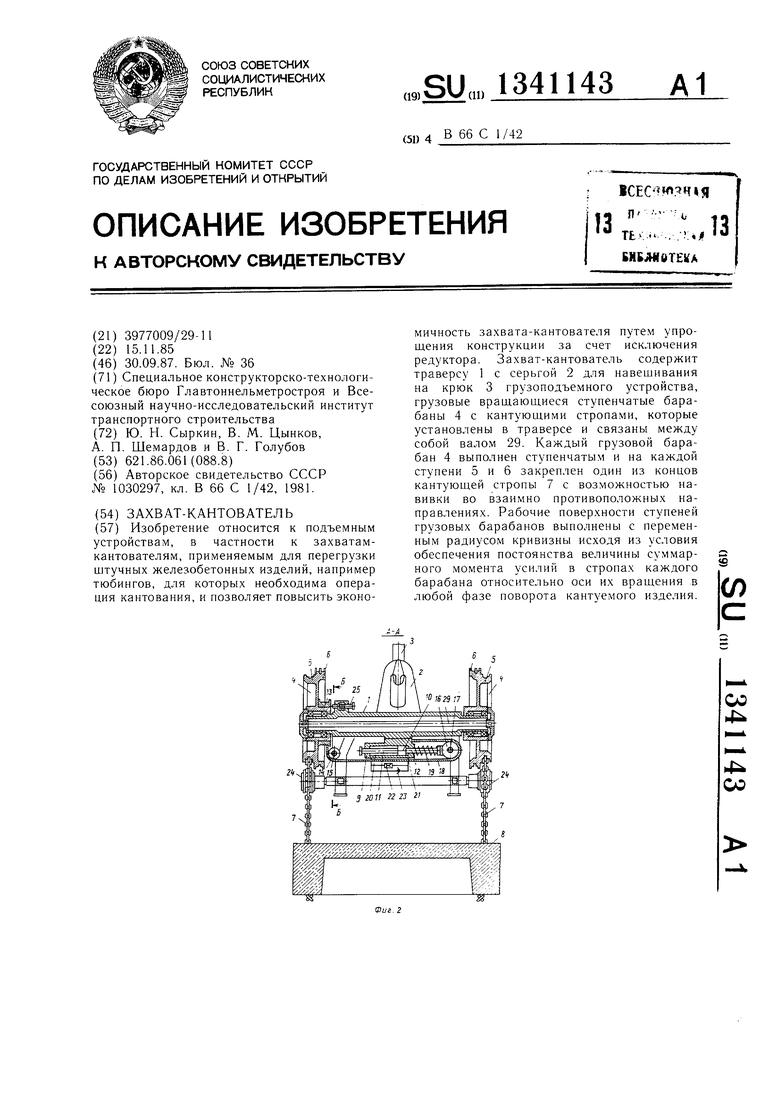
Редактор Л. Веселовская Заказ 4393/28
Составитель Е. Умрихина
Техред И. ВересКорректор Е. Рошко
Тираж 720Подписное
ВНИИПИ Государственного комитета СССР по делам изобретенип п открыт))й
1 13035, .Москва, Ж-35, Раушская наб.. д. 4,5 Производственно-полиграфическое предприятие, г. Ужгород. м. Проектная. 4
| Привод захвата-кантователя | 1981 |
|
SU1030297A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
