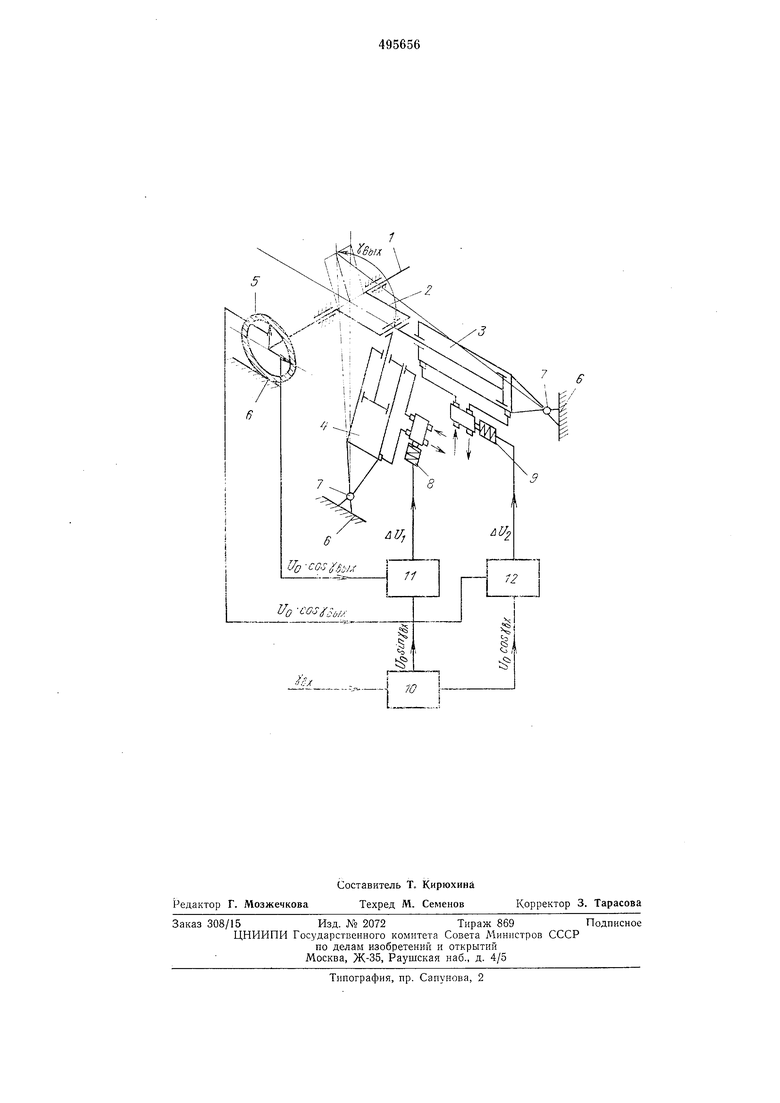
utiiiiaToro вала 2 € шариирно СВяза1И1Ыми выхиднылИ звеньями исполнительных силовых механизмов 3 ii 4 иоступательного действия. На вьходном валу 1 установлены движки сиiiVcao-KGCHHycHoro иотенциометра 5, корпус когорого закреилеи на общем основании 6. Д1ежду основанием и нснолнительными силовыми механизмами 3 и 4 установлены шарниры 7. Распределители 8 и 9 соединены трубопроводами с рабочими полостями соответствующих исполнительных силовых механизмов. Выходы потенциометра 5 и блока преобразования 10 подключены ко входам блоков сравнепия 11 и 12, выходы которых подключены к соответствующим распределителям 8 и 9. Положсния выходных звеньев исполнительных силовых механизмов согласованы с положением корпуса и движков потенциометра 5 таким образом, что экстремальным значениям напряжений с движков соответствуют крайние положения выходных звеньев.
Входной электрический сигнал задаваемого угла поворота в блоке 10 преобразуется в электрические сигналы, пропорциональные синусу и косинусу этого угла. Эти сигналы ноступают раздельно в блоки сравнения 11 и 12, iV-ie сравниваЕОтся с соответствующими сигналами с движков потенциометра 5, запитка которого обеспечивает отрицательную обратную связь. Сигналы рассогласования поступают на распределители 8 и 9, которые приводят в согласованное двиЛСение выходные звенья исполнительных силовых механизмов, одновременно отрабатывающих сигналы, соответствующие синусу и косинусу воспроизводимого угла поворота.
Таким образом, принцип осуществления неограниченных управляемых угловых перемещений основан на ненрерывном разложении задаваемого и воснроизводимого угла на две ортогональные компоненты, преобразуемые в электрические напряжения и отрабатываемые одновременно двумя идентичными автономными позиционными следящими системами, работающими на общий вал.
Формула изобретения
Следящий гидравлический привод, содержащий исполнительные силовые механизмы постунательного действия, выходные звенья которых шарнирно связаны с выходным коленчатым валом, а их опорные щарниры расположены на ортогональных осях в плоскости вращения выходного коленчатого вала, и распределители, отличающийся тем, что, с целью расщирения области применения, в привод введен блок преобразования, два блока сравнения, синусно-косинусный потенциометр, движки которого жестко связаны с выходным коленчатым валом, а корпус установлен на общем основании, причем выходы синусно-косинусного потенциометра и блока преобразования подключены к соответствующим блокам сравнения, выходы которых подключены к соответствующим распределителям.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий гидравлический привод | 1976 |
|
SU602933A1 |
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| Манипулятор | 1975 |
|
SU743861A1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |