I
Изобретение относигся к следшцим приводным устройствам, испопЕзэуемым в различных системах автоматического управления и регулирования, например для автоматического процесса управления различными машинами и аппаратами.
По основному авт. св. № 495656 иэвестен следящий гидравлический привод, содержащий исполнительные силовые меха низмы поступательного действия, ы.1ходные звенья которых шарнирно связаны с выходным коленчатым валом, а их опорные шарнирвл расположены на ортогональных осях в ПЛОСКОСТИвращения выходного коленчатого вала, распределители и синусно-косинусный потенциометр, движки которого связаны с выходным коленчатым валом, причем выходы синусно-косинусного потенциометра подключены к блокам сравнения, выходы которилх связаны с соответствующими распределителями.
Однако это приводное устройство не обеспечивает достаточной ппавности движений по всей траектории вращения выходного вал Экспериментальные исспедования показали,
2
что на траектории кругового врашеиия выходного вала имеются зоны, где движение выходного вала происходит неравномерно (ры& ками). Такие зонь образуются в моменты, когда один из штоков исполнительного сило. вого механизма находится во втянутом или гытянутом положениги. Это происходит из-за рассогласования между расходами жидкости, задаваемыми распределителями согласно управляющих сигналов по закону синуса-косинуса ДЛЯ каждого исполнительного силового механизма, и требуемыми расходами жидкости, определяемыми кинематикой механизма, где перемещения штоков исполнительных СИЛОВЫХ механизмов определ5потся по формуле
X T/T %e-2Recos L ,
шт
где ,Х щ - расстояние между осями шарниров исполнительного силового механизма, 1 - радиус кривошипа выходного вала, С - рассто$тие от оеи вращения выходного вала до оси опорного uiapuupa исполнительного СИЛОВОГО механизма,
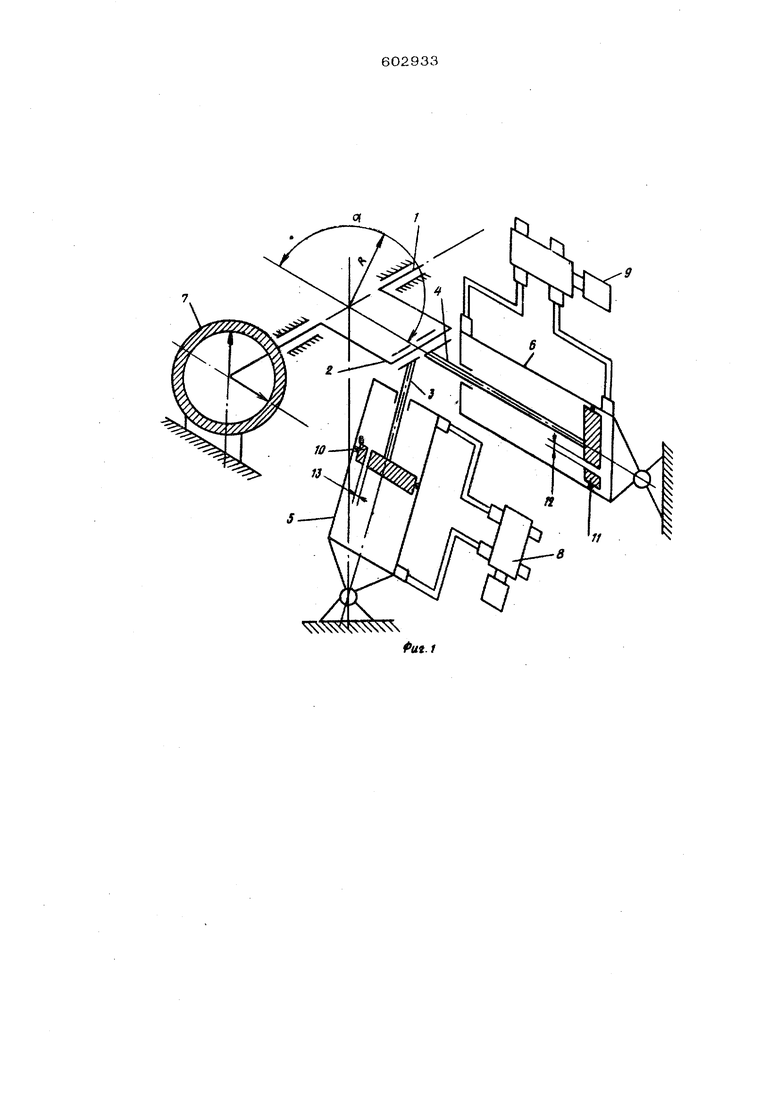
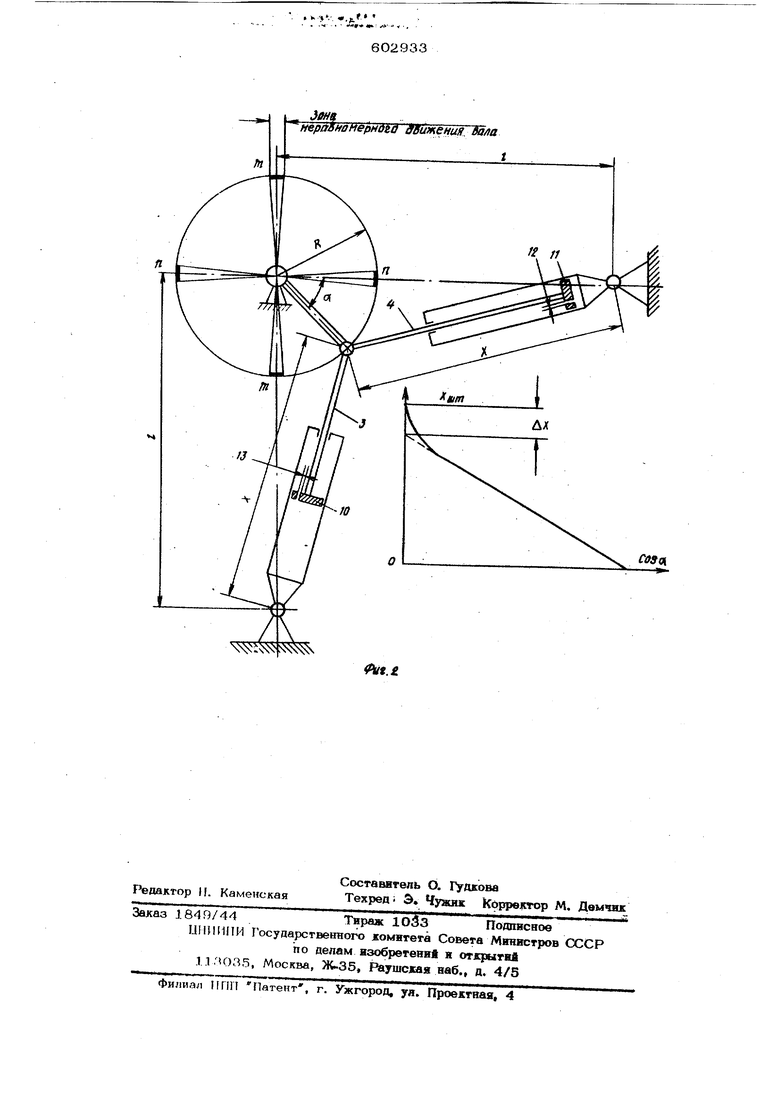
oL - угол поворота выхопиого вала. Рассогласование между задаваемыми и требуемыми расхоцами жидкосги приводит рассогдасовянию в осо&ах зонах скоростей перемещаемых- штоков исполнительных силовых механизмов, и, как следствие, к иеплавности движений. Для данной кинема тики приводного устройства такое рассогла сование теоретически будет отсутствовать при С оо . Целью изобретения является обеспечени плавности отработки движений выходнотх) вала по всей круговой траектории вращения т.е. повышение точности воспроизведения заданных угловых перемещений. Поставленная цель достигается тем, что в предлагаемом устройстве между полостямми исполнительных силовых механизмов по тупательного действия установлены дросс& ли, площади проходных отверстий которых выполнены в соответствии с соотноиюнием (0,4-0,5)-/0 5 где S площадь прочодного сечения дрос селя; мАко площадь пр оходного сечения в распределителе при полностью открытом зо лотнике. На фиг. 1 изображена принципиальнан сх ма привода; на фиг. 2 - расположенне зов нвравномерногб движения выходного вала иа круговой траектории и график кинематвческой зависимости реремещения штоков . исполнительных силовых механизмов по углу поворота ш хоаного вала. Привод состоит из выходного вала 1, на котором закрепляется объект вращения, коленчатого вала 2, с которым шаряирво сввзаны штока 3 и 4 исполнительных сило вых механизмов 5 в 6. На выходном валу 1 закреплены рвнжки сннусво-косинуснЬгхэ потенциометра 7 обратной свяаи. Распреде лители 8 и 9 соединены Фрубопроводами с рабочими полостями сеответетвукэщих гидро пилиндров исполнительных силовых механиз мов 5 и 6. Поршпи 1О и 11 исполнительных силовых механизмов соединены через дроссели 12 и 13. Привод работает следующим образом. При воздействии управляющих электрических сигналов пропорционально синусу и косинусу угла oL , распределители 8 и 9 пропускают жидкость в рабочие полости соответствующих исполнительных силовых метсанизмов с расходом, пропорциональным току управления. В результате происходят перемещения штоков 3 и 4 и поворот выходного вала 1. При поворотах выходного вала, когда один из штоков исполнительного силового механизма находится во втянутом или ЕЫтяиутом положении и не создает силового момента на выходном валу, перепуск жидкости в этом исполнительном силовом механизме из одной полости в другую через соответствующий дроссель позволяет этому штоку переместиться на величину, необходимую для того, чтобы шток второго исполнительного силового механизма беспрепятственно переместился на величину Д X. (фиг. 2), т.е. на величину рассогласования между задаваемым и требуемым по кинематике движением штока. При промежуточнь1х положениях штоков обоих исполнительных силовых механизмов дроссели 12 и 13 не эффективны, так как их пропускная способность относительно основного управляемого расхода незначительна. Таким образом в зонах Ш и ,п на круговой Ч аектории вращения выходного вала происходит согласование движений ЩТ1 ков исполнительных силовых механизмов и тем самым устраняется явление пересиливания одного штока другим и, как следствие, устраняется неплавность движений выходного вала. . Как видно иэ описания работы устройств ва, существенным является повышение качества воспроизведения заданных угловых перемещений. Качество воспроизведения заданных угловых перемещений повышается более чем на 6% от амплитуды колебаний выходного вала и устраняется неплавность движения по всей тр)аектории кругового вращения и 1ходного вала. Формулаиз обретения Следящий гидравлический привод по авт. св. № 495656, отличаю щийс я тем, что, с целью повышения точности, в нем между полостями исполнительных силовы:; механизмов поступательного дейст ВИЯ установлены дроссели, площади проходных отверстий которых выполнены в соо ветствии е соотношением 5др-(0,4-0.5).10-5,, в S.p - площадь проходного сечения дросселя, АЛАкс площадь проходного сечения в распределителе при полностью открытом золотнике.
6O2933
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий гидравлический привод | 1974 |
|
SU495656A1 |
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| Устройство для бескопирной обработки деталей с равноосным контуром на металлорежущих станках | 1976 |
|
SU599960A1 |
| Агрегат для проведения направленных скважин сложных траекторий с программным управлением движением рабочего органа | 1974 |
|
SU615190A1 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
неровна fepHOZo X WSSSSsN Шижения вам
