1
Изобретение относится к области aBtoMaTHки и вычислительной техники и может найти применение при построении систем программйого управления многокоординатными манипуляторами, литейными машинами и металлообрабатывающими станками.
ИЗВЕСТНЫ системы программного управления многбкоординатными манипуляторами, содержащие программный блок, выполненный в виде резистивно-диодной матрицы с коммутационными элементами набора программы, к входам которого через элементы «НЕ подключены датчики положения рабочих органов, а к выходам - блоки координатного управления, включающие триггеры и усилители, связанные с элементами управления движения рабочих органов.
Недостатком этих систем является их сложность и низкая надежность работы.
Целью изобретения является упрощение системы и повышение надежности ее работы.
Это достигается тем, что система содержит блоки реверса, причем первый, второй и третий входы блока реверса подключены к входам резистивно-диодной матрицы, связанным соответственно с датчиками крайних положений и среднего положения рабочего органа, четвертый и пятый входы блока реверса подключены к выходам триггеров блоков координатного управления крайних положений рабочего органа, а первый и второй выходы блока реверса через усилители связаны соответственно с управляющими элементами рабочего органа, а также тем, что блок реверса содержит четыре элемента «ЗАПРЕТ, две схемы «ИЛИ, две схемы «И, триггер реверса и два триггера Памяти, причем единичный вход пер вого триггера памяти и нулевой вход второго триггера памяти подключены к первому входу
блока реверса, единичный вход второго триггера памяти и нулевой вход первого триггера памяти подключены к второму входу блока реверса, единичные выходы триггеров памяти подключены к первым входам обеих схем
«И, вторые входы которых связаны с третьим входом блока реверса, выходы схем «И подключены соответственно к единичному и нулевому входам триггера реверса, входы первого и второго элементов «ЗАПРЕТ связаны с четвертым входом блока реверса, а входы третьего и четвертого элементов «ЗАПРЕТ - с пятым входом блока реверса, единичный выход триггера реверса соединен с запрещающими входами первого и четвертого
элементов «ЗАПРЕТ, а нулевой - с запрещающими входами второго и третьего элементов «ЗАПРЕТ, выходы первого и третьего элементов «ЗАПРЕТ через одну схему «ИЛИ подключены к первому выходу блока
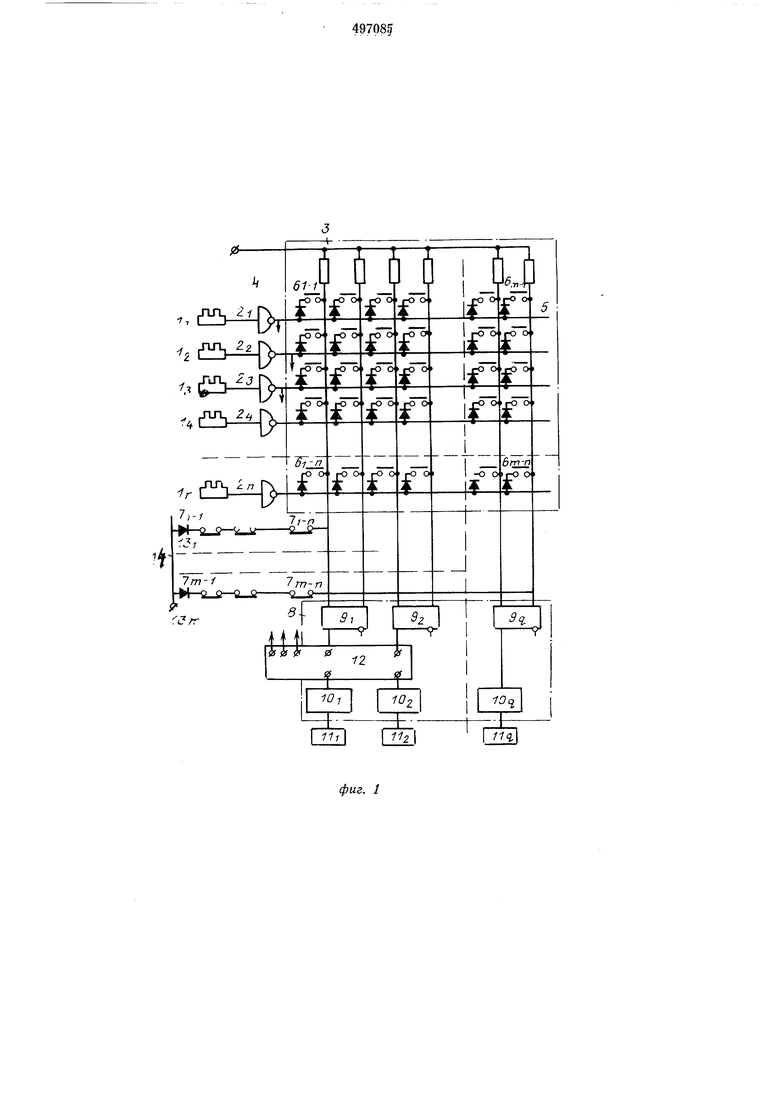
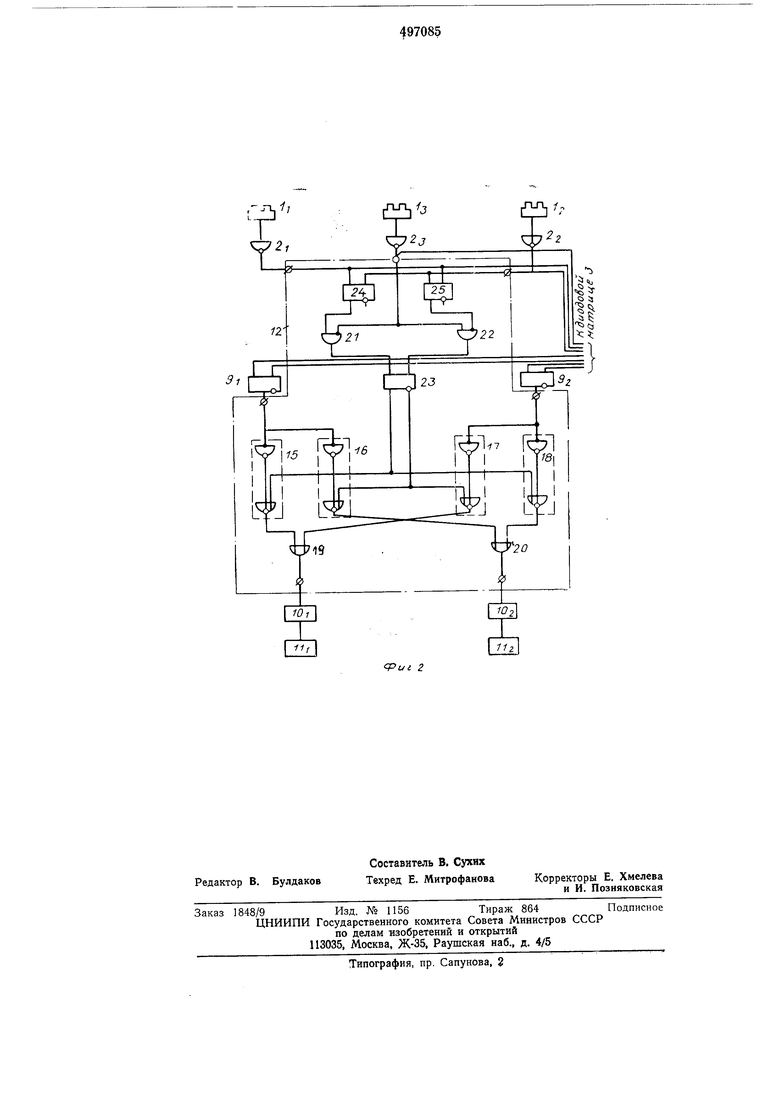
реверса, выходы второго и четвертого .члементов «ЗАПРЕТ через другую схему «ИЛИ подключены к второму выходу блока реверса, а также тем, что выходы резистивнодиодной матрицы через соответствующие последовательно соединенные нормально-замкнутые контакты коммутационных элементов набора программы и диод подключены к нулевой шине. На фиг. 1 показана блок-схема системы программного управления, а на фиг. 2 - схема блока реверса. Система программного управления (фиг. 1) содержит датчики 1ь Ь, -, п положения, элементы «НЕ 2ь 22, ..., 2п, резистивно-диодную матрицу 3 с вертикальной 4 и горизонтальной 5 шинами, коммутационные элементы 6i-i, ..., Qi-n, 6m-i, ..., 6m-n набора программы с нормально замкнутыми контактами , ..., 7i-n, 7m-i, ..., 7т-п, блок 8 координатного управления с триггерами 9i, Эз, ..., 9 и усилителями Юь 102, ..., lOg, элементы 11ь Иг-, Ид управления движением рабочих органов (на чертеже не показаны), блок 12 реверса, диоды 13i 182, ..., 13то и нулевую шину 14. Блок реверса на фиг. 2 содержит четыре элемента «Запрет 15-18, две схемы «ИЛИ 19 и 20, две схемы «И 21 и 22, триггер 23 реверса и триггера 24 и 25 памяти. Система программного управления работает следующим образом. После набора необходимой программы с помощью коммутационных элементов , ..., Sm-n (фиг. 1) обеспечивается поступление сигналов в определенной последовательности от датчиков li, ..., 1„ через элементы «НЕ 2, ..., 2„ и резистивно-диодную матрицу 3 к соответствующим триггерам 9i, ..., 9, блока 8 координатного управления. Для осуществления симметричных перемещений . объектов без изменения программы служит блок 12 реверса. В среднем положении соответствующего органа на первом и втором входах блока 12 реверса сигналы от датчиков li и Ь крайних ноложений рабочего органа отсутствуют, а на третьем входе сигнал имеется, так как сработал датчик Ь (см. фиг. 2). На вторых входах схем «И 21 и 22 имеется сигнал, но так как на первых их входах сигнал отсутствует, то на выходах схем «И 21 -ц 22 также отсутствуют сигналы. В этом состоянии схемы на единичных выходах триггеров 23, 24 и 25 сигналы отсутствуют, а на нулевых выходах этих же триггеров сигналы имеются. Нулевой сигнал с выхода триггера 23 реверса запирает элементы «ЗАПРЕТ 16 и 17. Согласно набранной программе в необходимый момент цикла от вертикальной щины 4 матрицы 3 (фиг. 1) сигнал поступит на триггер 9i блока 8 координатного управления. С выхода триггера 9i (фиг. 2) сигнал поступит на четвертый вход блока 12 реверса и через элемент «ЗАПРЕТ 15 и схему «ИЛИ 19 пойдет на усилитель Юь При этом включится элемент управления Hi и соответствующий рабочий орган манипулятора переместится в свое крайнее положение для обслуживания объекта. В начале перемещения рабочего органа сигнал от датчика Ц исчезнет. В конце неремещения рабочего органа срабатывает датчик h и на первом входе блока 12 реверса через элемент «НЕ 2i появится сигнал. При этом включится триггер 24 памяти и на первом входе схемы «И 21 ноявится сигнал, но на выходе его сигнала не будет, так как сигнал на третьем входе блока 12 реверса отсутствует. После выполнения операций у первого обслуживаемого объекта от диодной матрицы 3 согласно набранной программе сигнал поступит на включение триггера 92 и отключение триггера 9i блока 8 координатного управления. При этом элемент Hi управления отключится. С выхода триггера 92 сигнал поступит на пятый вход блока 12 реверса и через элемент «ЗАПРЕТ 18 и схему «ИЛИ 20 пойдет на усилитель 102. Нри этом включится элемент 112 управления движением рабочего органа в обратном направлении. При приходе рабочего органа в среднее положение вновь включается датчик 1з и на втором входе схемы «И 21 появится сигнал. При этом на выходе схемы «И 21 появится сигнал, который включит триггер 23 реверса. Триггер 23 реверса снимет сигналы с запрещающих входов элементов «ЗАПРЕТ 16 и 17 и подаст их на входы элементов «ЗАПРЕТ 15 и 18 и элемент На управления отключится. Когда согласно заданной программе вновь включится триггер 9i блока 8 координатного управления, то сигнал с четвертого входа блока 12 реверса через элемент «ЗАПРЕТ 16 и схему «ИЛИ 20 пройдет по второму выходу и включит усилитель 102 и управляющий элемент 1. Произойдет движение рабочего органа манипулятора к второму симметрично расположенному обслуживаемому объекту. При приходе рабочего органа во второе крайнее положение срабатывает датчик 12, который включит триггер 25 памяти и отключит триггер 24 памяти. При возврате рабочего органа манипулятора в среднее положение на выходе схемы «И 22 появится сигнал, который вернет триггер 23 реверса в исходное положение. Схема вновь готова к перемещению к первому обслуживаемому объекту. В некоторых случаях для работы многокординатного манипулятора нет небходимости в движении по какой-либо координате. В этом лучае останутся отключенными на одной или ескольких вертикальных шинах 4 резистиво-диодной матрицы 3 (фиг. 1) все коммутаионные элементы до 6n-i или 6m-i до т-п- в этом случае на вертикальной шине 4 ожет появиться ложный сигнал. Чтобы сигал не попал на триггеры 9i, 92, . .., 9, вертиальная шина 4 резистивно-диодной матрицы
3 через диоды 13ь ..., 13т и соответствующие последовательно соединенные нормально замкнутые контакты , ..., 7i-n, 7m-l, ..-, Im-n
коммутационных элементов подключена к нулевой шине 14. При этом сигнал на выходе вертикальной шины 4 отсутствует.
Предмет изобретения
1. Система программного управления многочоординатным манипулятором, содержаш,ая программный блок, выполненный в виде резистивно-диодной матрицы с коммутационными элементами набора программы, к входам которого через элементы «НЕ подключены датчики положения рабочих органов, а к выходам-блоки координатного управления, включающие триггеры и усилители, связанные с элементами управления движением рабочих органов, отличаюш;аяся тем, что, с целью упрощения и повышения надежности работы системы, она содержит блоки реверса, причем первый, второй и третий входы блока реверса подключены к входам резистивнодиодной матрицы, связанным соответственно с датчиками крайних положений и среднего положения рабочего органа, четвертый и пятый входы блока реверса подключены к выходам триггеров блоков координатного управления крайних положений рабочего органа, а первый и второй выходы блока реверса через усилители связаны соответственно с управляющими элементами рабочего органа.
2. Система по п. 1, отличающаяся тем, что блок оеверса содержит четыре элемента «ЗАПРЕТ, две схемы «ИЛИ, две схемы «И, триггер реверса и два триггера памяти, причем единичный вход первого триггера памяти и нулевой вход второго триггера памяти подключены к первому входу блока реверса, единичный вход второго триггера памяти и нулевой вход первого триггера памяти подключены к второму входу блока реверса, единичные выходы триггеров памяти подключены к первым входам обеих схем «И, вторые входы которых связаны с третьим входом блока реверса, выходы схем «И подключены соответственно к единичному и нулевому входам триггера реверса, входы первого и второго элементов «ЗАПРЕТ связаны с четвертым входом блока реверса, а входы третьего и четвертого элементов «ЗА.ПРЕТ - с пятым входом блока реверса, единичный выход триггера реверса соединен с запрещающими входами нерзого и четвертого элементов «ЗАПРЕТ, а нулевой - с запрещающими входами второго и третьего элементов «ЗАПРЕТ, выходы первого и третьего элементов «ЗАПРЕТ через одну схему «ИЛИ подключены к первому выходу блока реверса, выходь; второго и четвертого элементов «ЗАПРЕТ через другую схему «ИЛИ подключены к второму выходу блока реверса.
3. Система по п. 1, отличающаяся тем, что выходы резистивно-диодной матрицы через соответствующие последовательно соединенные нормально-замкнутые контакты коммутационных элементов набора программы и диод подключены к нулевой щине.
ПЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для программного управления | 1986 |
|
SU1345169A2 |
| СИСТЕМА КОММУТАЦИИ ПРОЦЕССОРОВ | 1991 |
|
RU2006931C1 |
| Устройство для циклового программного управления | 1986 |
|
SU1312527A1 |
| Одноканальное устройство для фазового управления статическим преобразователем | 1977 |
|
SU736344A1 |
| Устройство для контроля матриц памяти на цилиндрических магнитных пленках с неразрушающим считыванием информации | 1986 |
|
SU1387045A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| ШАГОВЫЙ ГРАФОПОСТРОИТЕЛЬ | 1970 |
|
SU267216A1 |
| ТРЕХКАСКАДНАЯ КОММУТАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2359313C2 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
г с
7;-/
11i
112
1,
22
2j
