Известен механизм управления несколькими трубчатыми кранами, состоящий из смонтированных на стойках станины привода, приспособления для поворота пробки крана, выполненного в виде перемещающегося параллельно оси расположения кранов ползуна с пальцем, взаимодействующим с рычагом, осуществляющим поворот пробки крана. Известный механизм не обеспечивает программированную подачу рабочих жидкостей, например, в гибкие щланги. Кроме того, такой механизм может управлять лишь трубчатыми неподвижными кранами, расположенными на одной оси.
Предлагаемый механи.ям отличается тем, что приспособление для поворота пробки крана выполнено в виде двух дугообразных копиров, каждый из которых жестко связан с щарнирно закрепленными на неподвижных опорах хвостовиками, взаимодействующими с электромагнитами и подпружиненными фиксирующими защелками. Каждый из дугообразных копиров может быть связан с подпружиненными рычагами, взаимодействующими с подвижными, например, от гидроцилиндров упорами. Благодаря такому конструктивному отличию обеспечивается программированная подача рабочих жидкостей, например, в гибкие щланги, а также управление несколькими подвижными трубчатылми кранами.
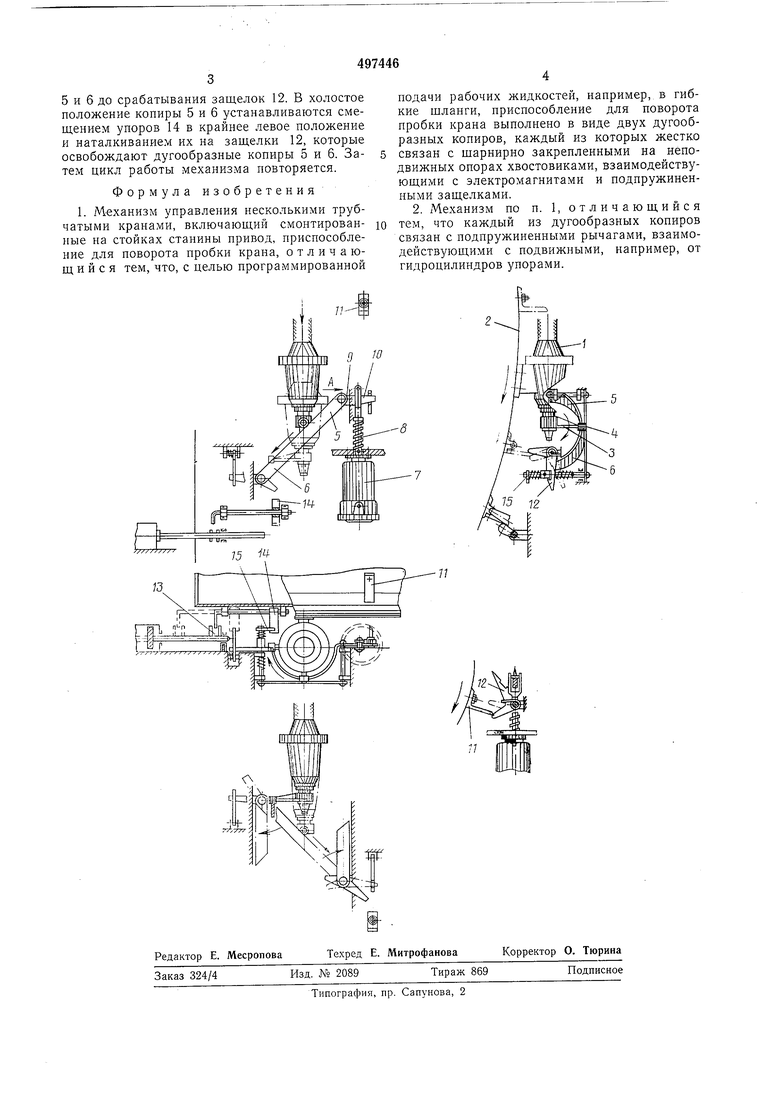
На чертеже изображен предлагаемый механизм, общий вид.
Краны 1 располагаются, например, по торцу вращающегося ротора 2, на поверхность которого навиты гибкие щланги для подачи рабочих жидкостей. При вращении ротора 2 рычаг 3 крана 1 с пробкой 4 скользит по наклонной новерхности дугообразных копиров 5 и 6, установленных в рабочее положение, в результате этого происходит поворот пробки 4. В рабочее положение дугообразные копиры 5 и 6 устанавливаются при включении с помощью счетно-импульсного реле электромагнитов 7, которые, втягивая сердечники 8, увлекают вниз шарнирно закрепленные на непо-, движных опорах 9 и связанные с дугообразными копирами 5 и 6 хвостовики 10. После поворота пробок 4 всех размещенных по торцу ротора 2 кранов 1, установленный между кранами 1 упор 11 воздействует на защелки 12, освобождая хвостовики 10, при этом дугообразные копиры 5 и 6 выводятся из рабочего положения.
В рабочее положение дугообразные копиры 5 и 6 могут быть также установлены с помощью, например, гидроцилиндров 13. Гидроцилиндры 13 по циклограмме переводят в крайнее правое положение подвижные упоры 14, которые увлекают вниз подпружиненные оычаги 15, связанные с дугообразными копирами
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ МОРОЗИЛЬНЫЙ АППАРАТ | 1972 |
|
SU355460A1 |
| Ротор к устройствам для упаковки стержнеобразных изделий | 1980 |
|
SU960079A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Стапелирующее устройство к прессу | 1976 |
|
SU716678A1 |
| РУЧНАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕМЕЩЕНИЯ БОЧЕК И СЛИВА ИЗ НИХ ЖИДКОСТЕЙ | 2008 |
|
RU2375228C1 |
| ПРОБИВНОЙ ПРЕСС | 1998 |
|
RU2137596C1 |
| Установка для прессования изделий давлением сжатой жидкости | 1973 |
|
SU561475A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
| Устройство для установки рулонов по оси прокатного стана | 1978 |
|
SU764772A1 |
| Устройство для образования попереч-НыХ шВОВ HA ТЕРМОСВАРиВАЕМыХ РуКАВАХи ОТРЕзАНия гОТОВыХ пАКЕТОВ | 1979 |
|
SU806540A1 |
