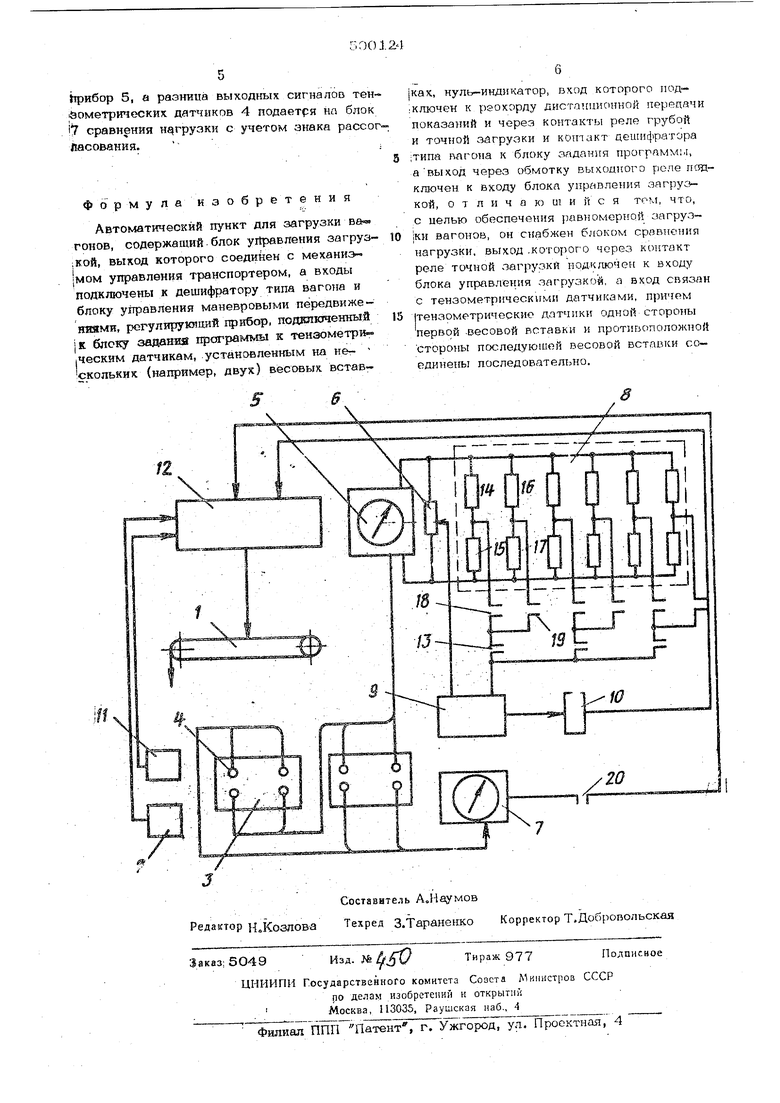
Изобретение относится к . железнодорожному транспорту к может ъпъ )ис пользовано при механизации и автомятизации погру зонных, работ. Известны устройства для загрузки вагонов, содержащие блок управления загрузкой, выкод которого соединен с механизмом управ ления транспортером, а входы подключены к дешифратору типа вагона и ьлоку управления маневровыми передвижениями, регулируююший прибор, подключенный к блоку задани программы и тензометрическим датчикам, установленным на нескЪлькик (например, двух) весовых вставках, нуль индикатор, вхо которого подключен к реохорду дистанционной передачи показаний и через контакты реле грубой и точной загрузки и контакт дешифратора типа вагона к блоку задания программы, а выход через обмотку выходн ого реле подключен к входу блока управления загрузкой. Цель изобретения - обеспечение равномерной загрузки вагонов. Для этого устройство снабжено бЛркомЦ сравнения нагрузки, вы(;од которого чорез контакт реле точной загрузки подключен к входу блока управления загрузкой, а вход связан с тензометрическими,датчиками, при чем тензометрические датчики одной сторо-. ны первой весовой вставки и противополож1гойстороны последующей весовой вставши соединены последовательно, t На чертеже показана структурная сх(Ьма предлагаемого устройства. На чертеже приняты следующие обойна ния: транспортер 1, блок 2 управлений маневровыми передвижениями, две весовые вставки 3, каждая из которых установлена на четыре тензометрических датчику 4, подключенных к регулирующему прибору 5, связанному с реохордом дистанционной передачи показаний 6, блок 7 сравнения нагрузки, блок 8 задания программы, к выходу кр торого подключен нуль-индикатор 9 с выходным реле 10, дешифратор 11 типа вагона, блок 12 управления загрузкой, контакт 13 дешифратора типа вагона, сопротивления 14- 17 контакт 18 релегрубой загрузки (ne на чертеже не показано} контакты iW я 20 реле точной загрузки (реле на чертвх/ не показано) Устройство работает спедуюишм образом Состав вагонов для погрузки подается в зону действия маневрового устройства и .транспортера 1, Оператор включает систем загрузки. Блох 2 управления маневровыми передвижениями, действующий автоь ати- чески, устанавливает вагон на весовые вст0 ки, при этом срабатывает дешифратор типа вагона н контактами 13 подкгаочает в бло ке задачи делитель напряжения из сопротйэ пений, например 14, 15 и 16, 17, соет- ветствуюших, грубой и точной загрузке дан ного типа вагона и одновременно в блоке 12 управления загрузкой реле, грубой загрузки, которое управляет скоростью йёрёдвижения рамы подающего конвейера трано портера и подключает в блоке 8 задания программы сопротивления .14, 15, Вк.гаочается привод ленты и привод пере движения рак-ш подающего конвейера транс портера 1 и начинается загруяка вагона с максимальной производительностью, так как рама конвейера движется вдоль вагона из одного крайнего положения в другое с- ми« нимальной скоростью. Стрелка регулирующего ьрибора показь вает величину загружаемого материала. Ползунок реохорда дистанционной порелачи показаний 6 перемешается в соответствии со стрелкой к точке компенсации напряжения разбаланса, создаваемого делителем напряжения из сопротивлений 14 иIS, Сопротивления 14, 15 выбраны так, чтобы напряжение разбаланса, создаваемое ими, соответствовало примерно номиНал ной загрузки вагона данного типа. По достижении велнгчииы грубой загруэки, т.е. при установлении баланса в блоке 8 задания программы, нуль-индикатор 9 срабатывает, и включается выкодное реле 10, которое произведет переключение в блоке 12 управления загрузкой, в результате ч:,ГО отключается реле грубой нагрузки, размыкает контакт 18.и вклк лается контакт 19 реле точной загрузки. .Соответственно переключаются их контак ты и происходят переключения в блоке зацания программы. Подключается делитель напряжения Ио сопротивлений 16, 17, соответствующих точной загрузке. передвижения рамы подающего конвейера транспортера 1 включают на большую рчнЛь и загрузка вагона . осуществляется с меньшей подачей за проход коивей ера, т.е. 6t.nee точная. Одновременно реле точной загрузки зал ыкает контакт 20 к подключает блок 7 сравиегпш нагрузки,: кокоры и осушеств ляат контроль за равномерностью нагрузкя не весовые вставки, онтроль за равномернс)стью нагрузки осушёствляется следующим образом. Прт- подходе подающего коттейера трано портера 1 к середине earoim, например, от первой весовой вставки ко второй, рама KOI вейера действует на конечный выключатель (на чертеже не показан), который подключа ет регул1груюшие контакты блока. Вели пер- вая весовая вставка нагружена меньше вто рой на огфеделенную величину, то привод мы конвейера реверсируется и конвейер повторно загружает часть вагона над первой весовой вставкой; если первая весовая встав еа ая.. . ка нагружен/а больше, то рама конвейера про додакает движение и конвейер загружает вагон над второй весовой вставкой. Таким образом, при подходе рамы конв-ей ера транспортера 1 к сер.еднне вагона, независимо с какой сторбны, проискодит опрос индика ора уравновешивания, подаются команды на управление перемещением рамыконвейера и осуществляется точная загруэ ка вагона с уравновешиванием нагрузки на Весовые вставки. По достижении величины загрузки те номинальной грузоподъемности вагона на :величину,выбранную при настройке, в блоке .задачи устанавливается равновесие, , Дйкатор 9 срабатывает и включает выходное реле 10, которое в блоке 12 управления з грузкой осуществляет переключение так, что при достижении равенства нагрузок на весо« вые вставки, привод лейты конвейера отключается, т.е. прекращается загрузка, а рама конвейера перемешается в исходное положе ние. : После остановки конвейера из блока управ пения подается команда блоку 2 управления маневровыми передвижениями на подачу. оче« редного вагона под погрузку и цикл загрузки .автоматически повторяется. Для того, чтобы результаты измерения не зависели от возможных вариаций установки вагона на в& совые вставки 3, от несиМметрии вйгона по отношению к его продольной оси, а также от поперечного уклона железнодорожной колеи, два тензометрическшк датчика 4 одной сторо ны первой весовой вставки и два тенэометри- ческих датчика противоположной стороны дру«.; гой весовой вставки подключены к рехулирувэ (у прибору 5, а другие тензометрические датчики 4 подключены к блоку 5 сравйения на, .грузки. При этом выходной сигнал с датчиков 4, пропорииональный прикладываемой нагруз ке, .суммируется и подается на регулирующий
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав | 1977 |
|
SU691371A1 |
| Устройство для автоматического управления погрузкой сыпучих грузов в полувагоны | 1977 |
|
SU695933A1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2277054C1 |
| Устройство для определения положения вагона на платформе весов и управления маневровым механизмом | 1976 |
|
SU657269A1 |
| Устройство для автоматического управления самоходными вагон-весами доменной печи | 1955 |
|
SU127443A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
