1 :
Изобретение относитея к области измерения параметров движения и может быть использовано для гидрометеорологических исследований.
Известное устройство для измерения параметров потока по авт. св. № 390448 позволяет измерить лишь модуль скорости потока, что недостаточно при исследовании, например, турбулентности потока, когда необходимо знать составляюш,ие скорости потока относительно заданных координатных осей.
Цель изобретения - рася1ирение функциональных возможностей устройства.
Это достигается тем, что в предлагаемое устройство для измерения параметров потока по авт. св. № 390448 введен узел составляющей скорости, содержащий плоский чувствительный элемент («флажок), закрепленный на одном конце оси, нуль-орган и ферромагнитную систему, подвижные элементы которых кренятся к этой же оси, источник тока и регулятор, причем одна обмотка ферромагнитной системы соединена с источником тока через регулятор, а другая обмотка включена последовательно с обмотками основной ферромагнитиой системы.
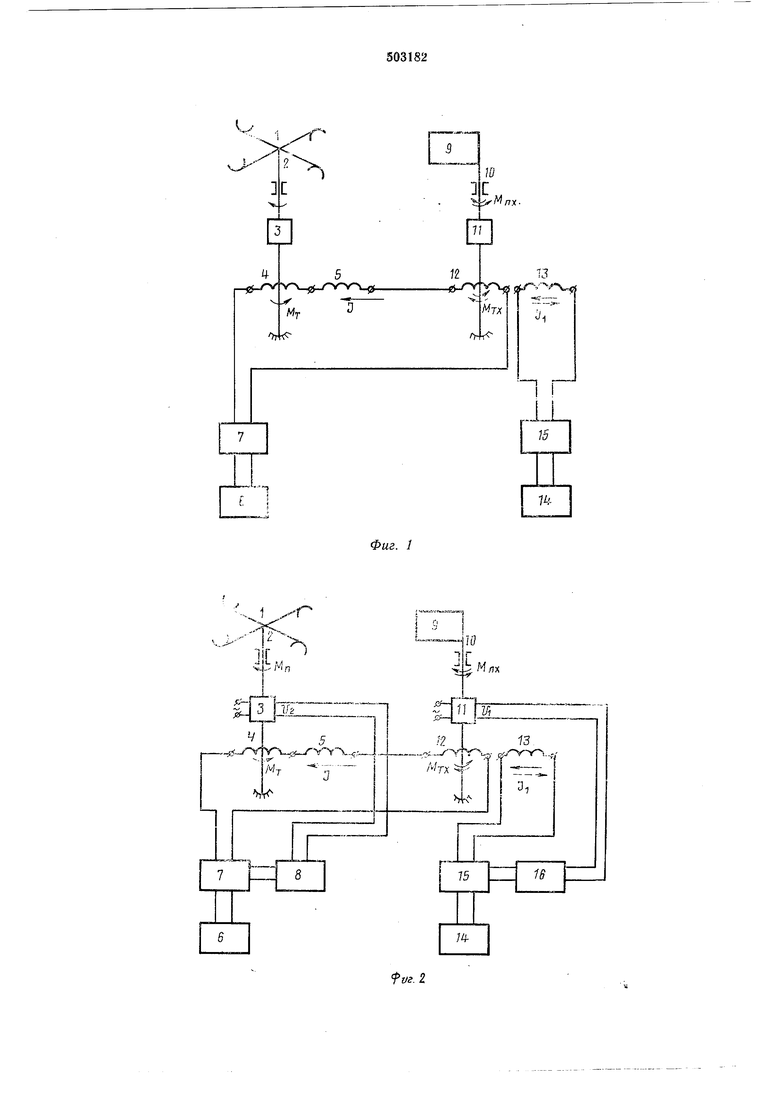
На фиг. 1 показана схема онисываемого устройства; на фиг. 2 - его компенсационная схема.
Устройство состоит из узла модуля скорости потока и узла составляющей скорости потока.
Узел модуля скорости потока состоит из чувствительного элемента 1 чашечной или лоиастной конструкции, закрепленного на одном конце поворачивающейся оси 2. К этой же оси крепятся подвижная система нуль-органа 3, отмечающего нулевое положение, и ротор ферромагнитной системы, обмотка 4 которого
электромагнитно связана с обмоткой 5 статора. Обмотка 4 ротора и обмотка 5 статора соединены между собой последовательно и питаются от источника тока 6, сила тока которого регулируется регулятором 7. Ток можно регулировать вручную или автоматически при помощи следящей системы. Нуль-орган 3, усилитель 8, регулятор 7 тока и обмотки 4 и 5 ферромагнитной системы этого узла образуют следящую систему, автоматически возврапдающую ротор ферромагнитной системы, подвижный элемент нуль-органа и чувствительный элемент узла модуля в исходное (нулевое) ноложение. Узел составляющей скорости потока содержит чувствительный элемент 9 плоской конструкции («флажок), закрепленный на оси 10. Флажок располагают таким образом, чтобы нормаль к его плоскости оказалась параллельной оси координат, относительно которой
определяется составляющая скорости. К этой же оси крепятся подвижный элемент нуль-органа 11 и ротор ферромагнитной системы, обмотка 12 которого электромагнитно связана с обмоткой 13 статора. Одна из этих обмоток включена последовательно с обмотками 4 и 5 ферромагнитной системы узла модуля и питается поэтому тем же током /, а другая обмотка питается от источника тока 14, направление и сила тока которого /i регулируются регулятором 15. Ток /1 можно регулировать вручную или автоматически при помощи следящей системы. В последнем случае напряжение рассогласования и этого узла, создаваемое ну;1Ьорганом 11 при отклонении чувствительного элемента 9 от пулевого положения, усиливается усилителем 16 и управляет фазочувствптельпым регулятором 15. Нуль-орган 11, усилнтель 16, регулятор 15 тока, обмотка 13, обмотки 12, 4 и 5 обеих ферромагнитных систем, нуль-орган 3, усилитель 8, регулятор тока 7 образуют следящую систему, возвращающую ротор ферромагнитной системы, подвижный элемент нуль-органа и чувствительный элемент узла составляющей в исходное (нулевое) ноложение. Поток, воздействуя на плоский чувствительный элемент 9, создает вращающий момент AJnx /4i , где А - постоянная величина, определяемая формой и размерами чувствительного элемента 9; а - угол, образованный нормалью к нлоскости чувствительного элемента 9 и нанравленнем скорости потока. Токи / и /1, проходя, соответственно, по обмоткам 12 и 13, создают вращающий мо.мент Мтх 5,//ь где BI - постоянная величина, зависящая от конструкпии и материала сердечника ферромагнитной системы этого узла и числа витков обмоток 12 и 13. Направление тока /i должно быть выбрано таким, чтобы момент УИтх, созданный токами / и /ь был противоположеп по знаку моменту /VJnx, созданному воздействием потока на чувствительный элемент 9. Величину тока 1 подбирают такой, чтобы происходило уравновещивание моментов Л/тх и yVIiix, т. е. чтобы Л,1/2соза В1. Если чувствительный эледмент 9 в исходном (нулевом) положении расположен так, что нормаль к его плоскости параллельна координатной оси, относительно которой определяется составляющая скоростн потока Кх, то 1/,:: -1/С05«. /,-С,/, Таким образом, выходная величина этого узла (ток /i) линейно связана с измеряемой составляющей скорости потока I/:;. Следящие системы должны быть выполнены таким образом, чтобы интервал времени, в течение которого регулируются токи / и 1, был в несколько раз меньще наименьщего периода пульсации скорости потока (по величине и направлению). Следящие системы могут быть астатическими и статическими. При необходимости одновременного измерения модуля и двух или трех составляющих скорости потока в устройство вводят, соответственно, два или три узла составляющих скоростн, плоские чувствительные элементы которых ориентируют таким образом, чтобы нормалп к их плоскостям оказались параллельными соответствующим координатным осям. Описанное устройство дает возможность определить более полно параметры скорости потока. Преимуществом его является линейная зависимость выходных величин от измеряемых параметров. Ф о з м у л а изобретения Устройство для измерения параметров потока по авт. св. № 390448, отличающееся тем, что, с пелью расщирения функциональных возможностей, оно снабжено узлом составляющей скорости, содержащим плоский чувствительный элемент, установленный на оси, нуль-орган и ферромагнитную систему, подвижные злементЕэ которых связаны с той же осью, источник тока и регулятор, причем одна обмотка ферромагнитной системы соединена с источником тока через регулятор, а другая включена последовательно с обмотками основной ферромагнитной системы.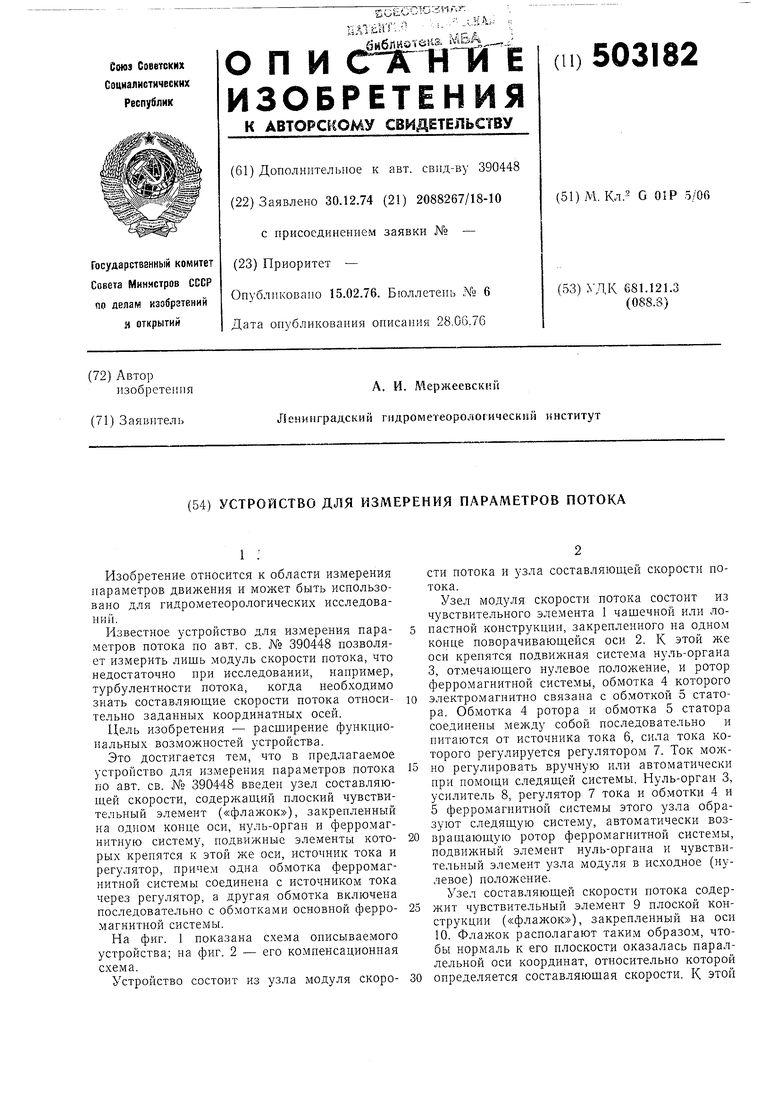
| название | год | авторы | номер документа |
|---|---|---|---|
| Система электроснабжения узла нагрузки | 1981 |
|
SU1103324A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АСИНХРОННОГО ДВИГАТЕЛЯ В РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ | 2000 |
|
RU2184417C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |