1
Изобретение относится к системам автоматического регулирования и может быть использовано при создании прецизионных следящих приводов.
Известна двухканальная следящая система, содержащая основной привод, состоящий из последовательно соединенных чувствительного элемента, усилителя, исполнительного двигателя, дифференциала, редуктора, нагрузочного элемента, и корректирующий привод, состоящий из усилителя, соединенного с исполнительным двигателем. Недостатками системы с выборкой зазоров дополнительным корректирующим приводом, работающим по сигналу погрешности редуктора, являются взаимовлияние работы основного и корректирующего привода в динамике из-за отсутствия необратимой передачи хотя бы в канале одного привода, что приводит к неоправданному росту мощности корректирующего привода и низкие показатели качества работы системы, так как корректирующий привод практически эквивалентен внутренней положительной обратной связи в основном приводе, что может привести к потере устойчивости системой; кроме того, датчики должны обладать точностью, чтобы измерить погрешность редуктора, следовательно, они имеют большой вес и габариты; наличие механической связи между датчиками и соответствующими валами редуктора и нагрузки через муфты той или иной конструкции может привести к ложной информации на выходе датчиков о погрещностях.
Описываемая система отличается тем, что в корректирующий привод введены пороговое устройство, дифференциал, муфта предельного момента, необратимый редуктор, причем вход порогового устройства соединен с выходом чувствительного элемента основного привода, а выход - со входом усилителя корректирующего привода, вход дифференциала соединен с выходом исполнительного двигателя корректирующего привода, первый выход которого соединен со входом необратимого редуктора, а второй выход - со входом муфты предельного момента, выход которой соединен с корпусом, а вход необратимого редуктора- с одним из входов дифференциала основного привода. Это позволяет повысить точность системы без потери ею запасов по устойчивости.
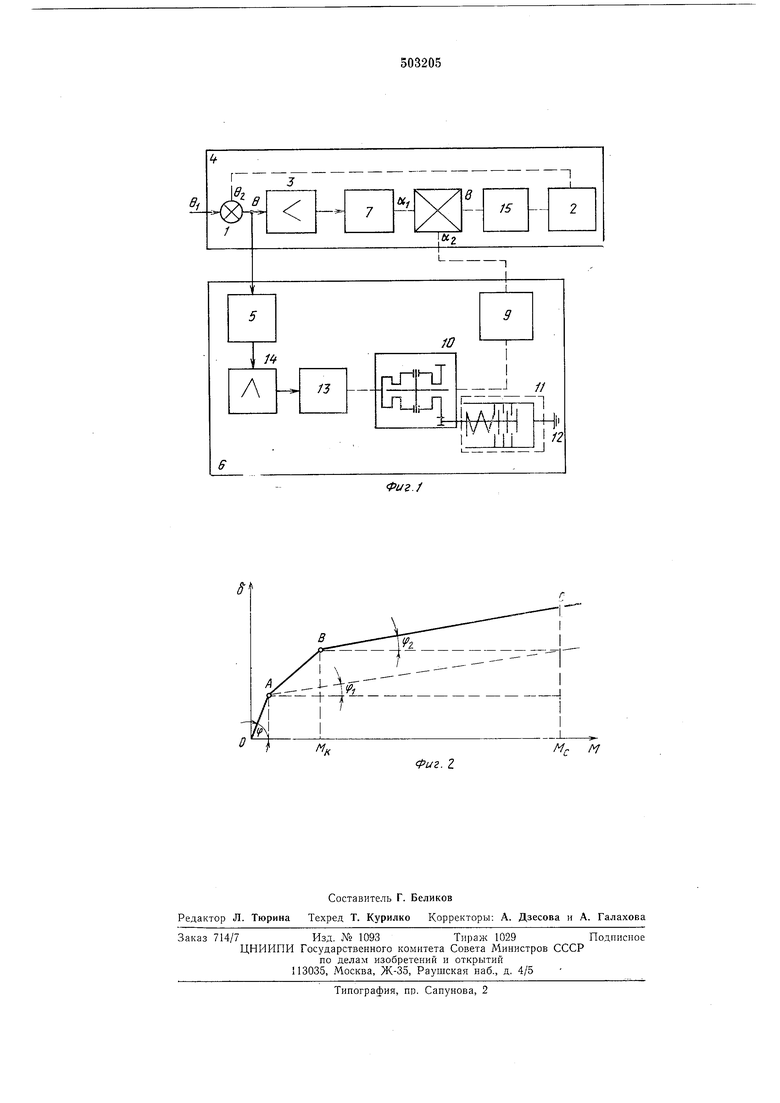
На фиг. 1 представлена блок-схема описываемой системы; на фиг. 2 - график, поясняющий эффект повыщения жесткости редуктора основного привода, и приняты следующие буквенные обозначения: вь @2 - соответственно входная и выходная величина системы; в - ошибка системы; cci, а2 - углы поворота входных валов дифференциала соответственно основным приводом с корректирующим приводом; М, Мс, Мк - моменты соответственно на валу нагрузки, входном валу дифференциала по основному каналу и входном валу дифференциала по корректирующему каналу; ф, tpi, ф2 - жесткости передачи соответственно без устройства выбора зазоров, с устройством выбора только люфта; с устройством выбора люфта и контактных и изгибных деформаций; б - разность между углами поворота входного и выходного валов механической передачи, приведенными к одному и тому же валу.
Описываемая система состоит из чувствительного элемента 1, на один вход которого поступает входная величина @ системы, а второй вход соединен с выходом нагрузки 2. Выход элемента 1 соединен со входами усилителя 3 основного привода 4 и порогового устройства 5 корректирующего привода 6. Выход усилителя 3 соединен со входом исполнительного двигателя 7 привода 4, а выход двигателя 7 соединен с одиим из входов дифференциала 8 привода 4. Второй вход дифференциала 8 соединен с выходом необратимого редуктора 9 привода 6. Вход редуктора 9 соединен с одним из выходов дифференциала 10 привода 6, второй выход которого соединен с входным валом муфты предельного момента II, выход которой соединен с корпусом 12. Входной вал дифференциала 10 соединен с выходом двигателя 13, вход которого соединен с выходом усилителя 14. Вход усилителя 14 соединен с выходом порогового устройства 5. Выход дифференциала 8 соединен со входом редуктора 15, выход которого соединен со входом нагрузки 2.
При подаче на вход системы входного воздействия QI в начальный момент на выходе элемента 1 появляется рассогласование в, превыщающее допустимое значение. Пороговое устройство 5 по сигналу 0 срабатывает и сигнал в, усиленный усилителем 14, поступает на двигатель 13, который через дифференциал 10 и редуктор 9 воздействует на один из входов дифференциала 8, выбирая в дифференциале 8 и редукторе 15 люфты, контактные и изгибные деформации. После достижения определенных моментов на выходном валу редуктора 9 и одном из выходных валов дифференциала 10, превосходящих момент проскальзывания муфты 11, движение от двигателя 13 передается только муфте И.
При таком построении системы увеличивается эквивалентная жесткость редуктора 15 как в статических, так и в динамических режимах работы системы. Эффект увеличения эквивалентной жесткости можно объяснить графиком (см. фиг. 2), где участок ОА характеризует выборку люфта, участок АВ - контактные изгибные деформации, а участок
ВС - унругие деформации. Углы наклона соответствующих отрезков графика ф, фь ф2 характеризуют эквивалентные жесткости механической передачи. Из анализа графика видно, что при обеспечении предварительного выбора люфта, а также изгибной и контактной деформации эквивалентная жесткость передачи будет характеризоваться только упругими деформациями. Это и обеспечивает корректирующий капал 6 в системе.
Ввод порогового устройства 5 исключает привод 6 из работы системы при ощибках, меньщих заданных техническими требованиями. Ввод муфты предельного момента 11 обеспечивает выработку приводом 6, момента, не превыщающего значения Мк, т. е. устраняет влияние привода 6 на величину упругих деформаций в передачах дифференциала 8 и редуктора 15. Ввод необратимого редуктора 9
исключает взаимовлияние приводов 4 и 6 в динамике. Подключение входа привода 6 к выходу чувствительного элемента 1 обеспечивает независимость качества влияния привода 6 на улучшение характеристик привода 4
от точности измерения погрешностей передач дифференциала 8 и редуктора 15. Знак ввода поправки а2 определяется знаком ошибки системы. Быстродействие привода 6 должно быть
значительно выще привода 4, обеспечение чего не вызывает трудностей, так как мощность привода 6 значительно меньше мощности привода 4.
Формула изобретения
Двухканальная следящая система, содержащая основной нривод, состоящий из последовательно соединенных чувствительного элемента, усилителя, исполнительного двигателя, дифференциала, редуктора, нагрузочного элемента, и корректирующий иривод, состоящий из усилителя, соединенного с исполнительным двигателем, отличающаяся тем, что, с целью повышения точности системы, в коррекUо
тирующий привод введены пороговое устройство, дифференциал, муфта предельного момента, необратимый редуктор, причем вход порогового устройства соединен с выходом чувствительного элемента основного привода, а выход - со входом усилителя корректирующего привода, вход дифференциала соединен с выходом исполнительного двигателя корректирующего привода, первый выход которого соединен со входом необратимого редуктора,
а второй выход - со входом муфты предельного момента, выход которой соединен с корпусом, а вход необратимого редуктора - с одним из входов дифференциала основного привода.
Mr /V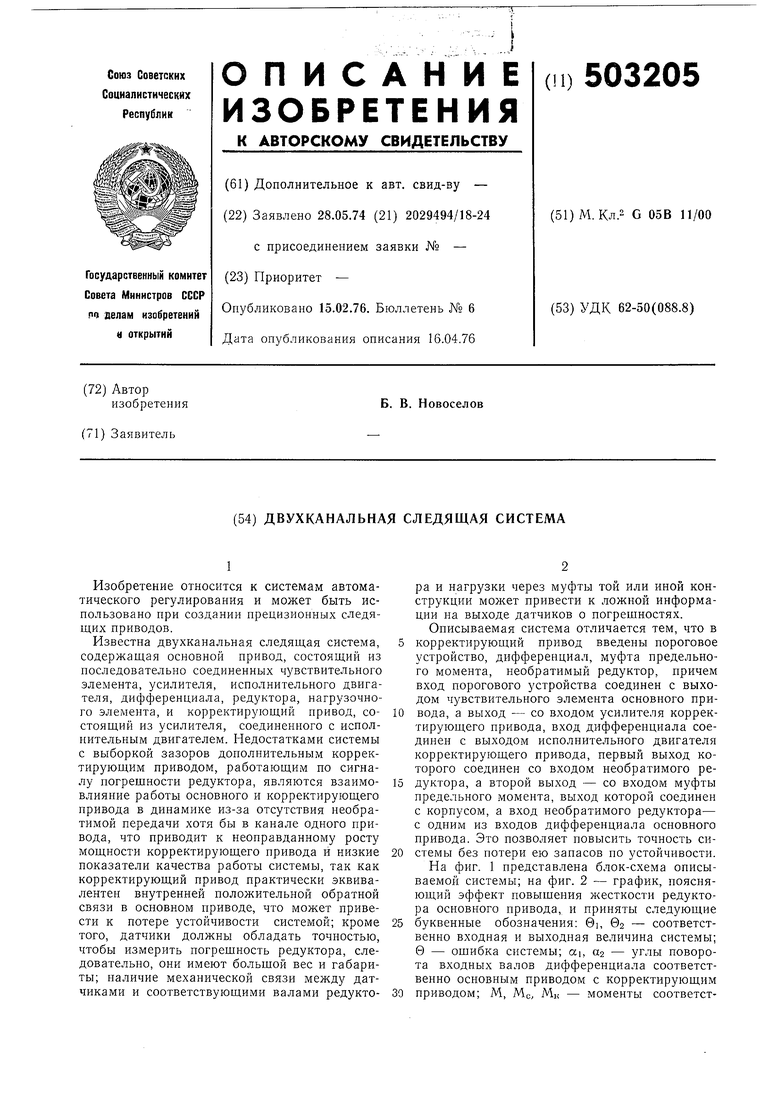
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изменения характеристики жесткости привода | 1973 |
|
SU660042A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Устройство для устранения люфта в редукторе | 1974 |
|
SU554532A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Двухканальный следящий привод | 1975 |
|
SU579596A1 |