1
Изобретение относится к системам управления с переменными параметрами и может быть использовано в релейных системах управления медленно протекающими ;и инерционными объектами.
Известен способ управления объектом в системах с релейным опережающим элементом, заключающийся в формировании управляющего воздействия в интервале от момента совнадения величины сигнала рассогласования и величины сигнала включения релейного элемента до момента совпадения величины уменьщающегося сигнала рассогласования и величины сигнала отключения релейного элемента. Однако при использовании известного способа управления нельзя выбрать такую ширину петли, которая одновременно удовлетворяла бы заданным параметрам переходных и установившихся процессов.
Для новышения качества процесса управления предлагается величины сигнала отключения релейного элемента уменьшать в интервале времени от момента включения релейного элемента до момента совпадения величины увеличивающегося сигнала рассогласования и величины сигнала отключения релейного элемента. Кроме того, величину сигнала отключения релейного элемента предлагается уменьшать с постоянно нарастающей скоростью.
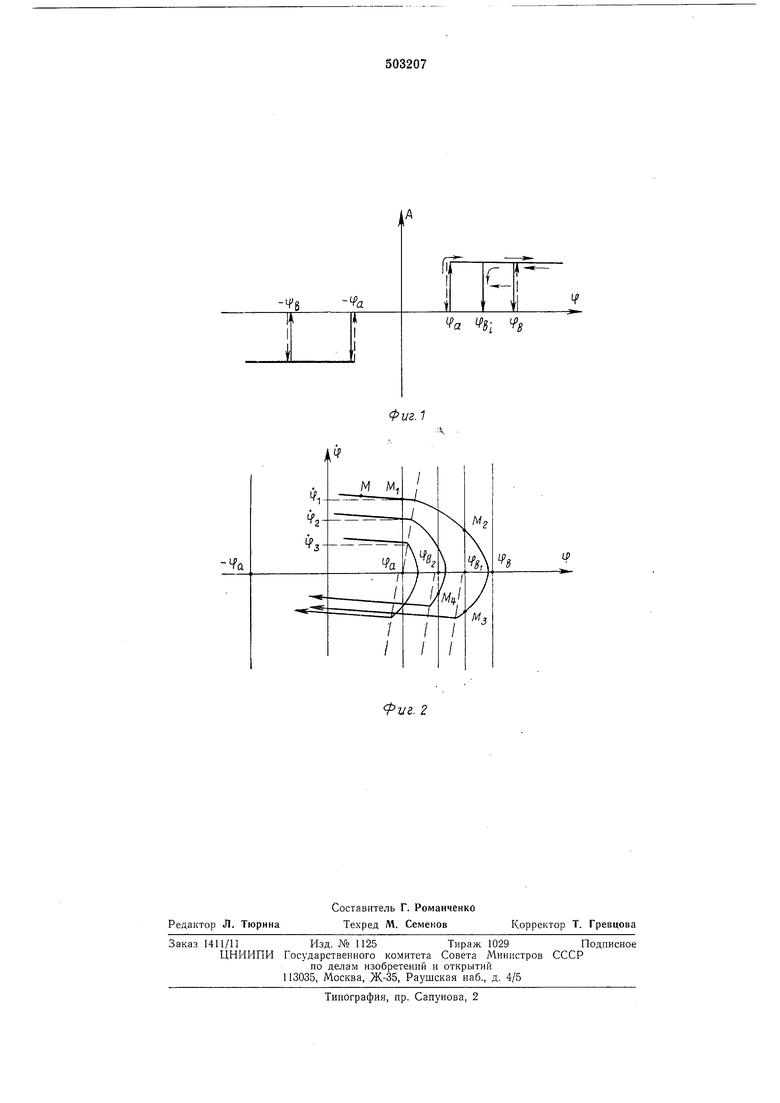
На фиг. 1 представлена статическая характеристика релейного опережающего элемента; на фиг. 2 - фазовые траектории движений при осуществлении предложенного способа. На фиг. 1 по оси абсцисс показана величина отклонения регулируемой величины - текущая ошибка управления ф; по оси ординат - амплитуда выходного сигнала опережающего элемента А; фа(-фа)-величина сигнала включения релейного элемента;
Ф(-фь)-статическая величина сигнала отключения релейного элемента; ф. , -ф.
(, 2, 3, ...) - текущие величины сигнала отключения релейного элемента; на фиг. 2 -
по оси абсцисс показана величина отклонения регулируемой величины - текущая ошибка управления ф; по оси ординат - величина скорости отклонения регулируемой величины ф; М - текущее положение изображающей
точки; (fa, -фа, , -(fb - статические границы включения и отключения соответственно, определяемые статнческими величинами сигналов включения и отключения релейного элемента; фб , -(f 1ц-смепхенные границы отключения, определяемые текущими величинами сигнала отключения релейного элемента. Суть способа управления состоит в следующем. Границы фа и -фа определяют зону нечувствительности системы управления, peaлизующей предложенный способ. На этих границах осуществляется включение исполнительных органов (ИО) - точка MI - и их отключение, если они не были выключены ранее: ири движении изображающей точки в интервале фа, фь или -фа, -фь . С МОМбНТа
включения ИО величину сигнала отключения релейного элемента начинают смещать (уменьщать), т. е. смещают границу фг,(-фб), с постоянно нарастающей скоростью. В какой-то момент изображающая точка достигает смещенную границу отключения ф& (точка MZ)В этот момент уменьщение сигнала отключения релейного элемента прекращается, т. е. прекращается смещение границы фб. Когда в процессе своего уменьщения сигнал ошибки принимает значение, равное сигналу отключения релейного элемента, формирование управляющего воздействия заканчивается (точка Л1з).
Существует интервал начальных скоростей изображающей точки (например, скорость Ф2), при которой ее встреча со смещенной линией отключения ф, происходит при отрицательной скорости изображающей точки (точка М). Существует также интервал начальных скоростей изображающей точки М (например, скорость фз), при которых она никогда не встретится со смещаемой линией отключения фь, т. е. ири этих скоростях отключение ИО происходит на границе зоны нечувствительности.
Если предположить, что в системе управления, реализующей предложеиный способ, запаздывания отсутствуют, то можно говорить об установившихся движениях (колебаниях) вблизи положения равновесия со скоростью
равной начальной, не обеспечивающей пересечение границы отключения фг, (скорость фз). В реальных системах управления колебания «разматываются до тех пор, пока не произойдет встреча точки М со -смещаемой линией отключения.
Уменьщение величины сигнала отключения релейного элемента с нарастающей скоростью
позволяет обеспечить хорошее демпфирование движений с большими начальными скоростями и в то же время дает хорощее качество установившихся движений, что недостижимо в системах управления, в состав которых входят опережающие элементы с неизменяемыми уровнями отключения.
Формула изобретения
1.Способ управления объектом в системах с релейным опережающим элементом, заключающийся в формировании управляющего воздействия в интервале от момента совпадения величины сигнала рассогласования и величины сигнала включения релейного элемента до
момента совпадения величины уменьшающегося сигнала рассогласования и величины сигнала отключения релейного элемента, отличающийся тем, что, с целью повышения качества процесса управления, величины сигнала отключения релейного элемента уменьщают в интервале времени от момента включения релейного элемента до момента совпадения величины увеличивающегося сигнала рассогласования и величины сигнала отключения релейного элемента.
2.Способ по п. 1, отличающийся тем, что величину сигнала отключения релейного элемента уменьшают с постоянно нарастающей скоростью.
iff
Риг. г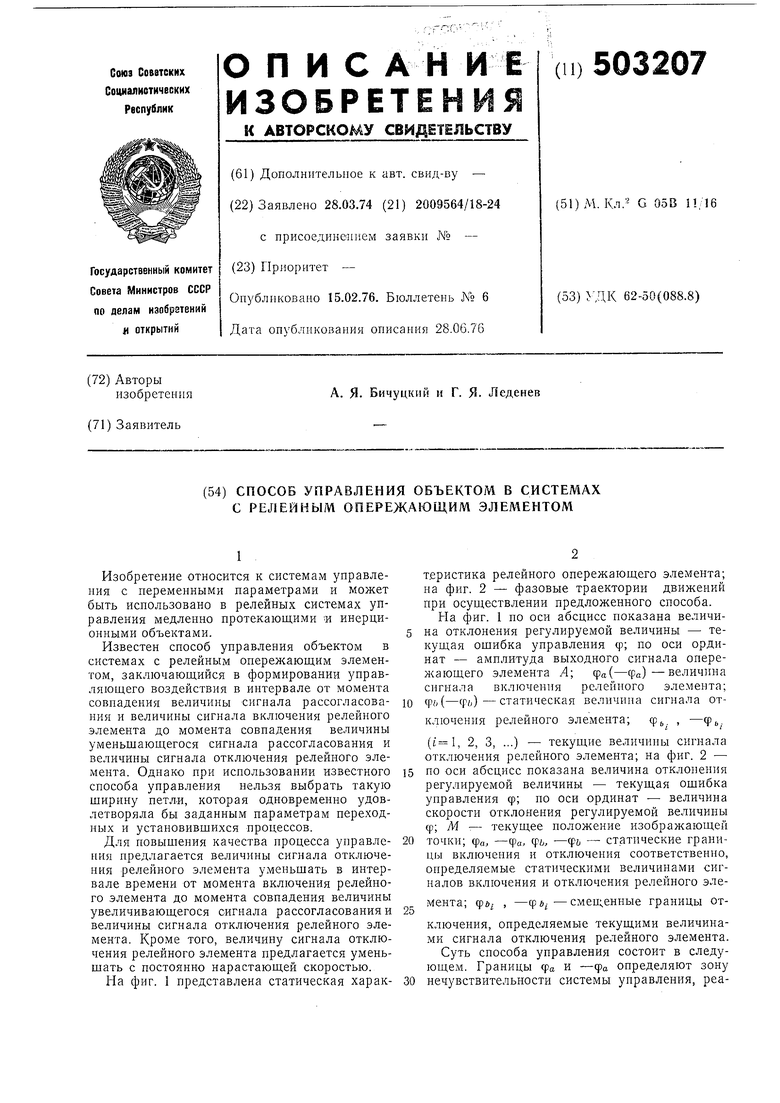
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления | 1975 |
|
SU805247A1 |
| Способ формирования управляющегоСигНАлА B РЕлЕйНО-иМпульСНыХСиСТЕМАХ упРАВлЕНия | 1976 |
|
SU796785A1 |
| Многопороговый релейный элемент с опережающей характеристикой | 1989 |
|
SU1629977A1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Релейный регулятор | 1989 |
|
SU1742786A1 |
| Релейный регулятор | 1975 |
|
SU809054A1 |
| Способ управления электродвигателем | 1978 |
|
SU875564A1 |
| Устройство для контроля релейного регулятора | 1980 |
|
SU930276A1 |
| Релейное управляющее устройство | 1972 |
|
SU443363A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1640667A1 |