контурной CAP с пропорционально-дифференциальным законом управления в линейном режиме опнсывается соотношениями
I:R-f,l Ал: At/, г(п + а) Г° - блок управления 2,
2Сг Д А/1 LoAf/
Uo
- исполнительный блок 3,
лт
Е -Лг ДАх ЕВуДЛАЛ , ,
i
т, /г-п а - объект регулирования 4 и измерительный блок 5,
1 ..1
-т- Б БуД +А/г + S Л . Д + .
,- 0 - продифференцированное о раз
дифференциальное уравнение объекта регулирования 4 совместно с измерительным блоком 5,
где Ло, Л; , Bj, Сс ; Lo, Р1 -постоянные коэффициенты; Д - оператор вида d/dt;
Ах, ., А/г, Af/ - малые отклонения соответственно на выходах элемента сравнения, измерительного, исполнительного и управляюН1,его устройств;
п, т, k, г - пределы дифференцирования.
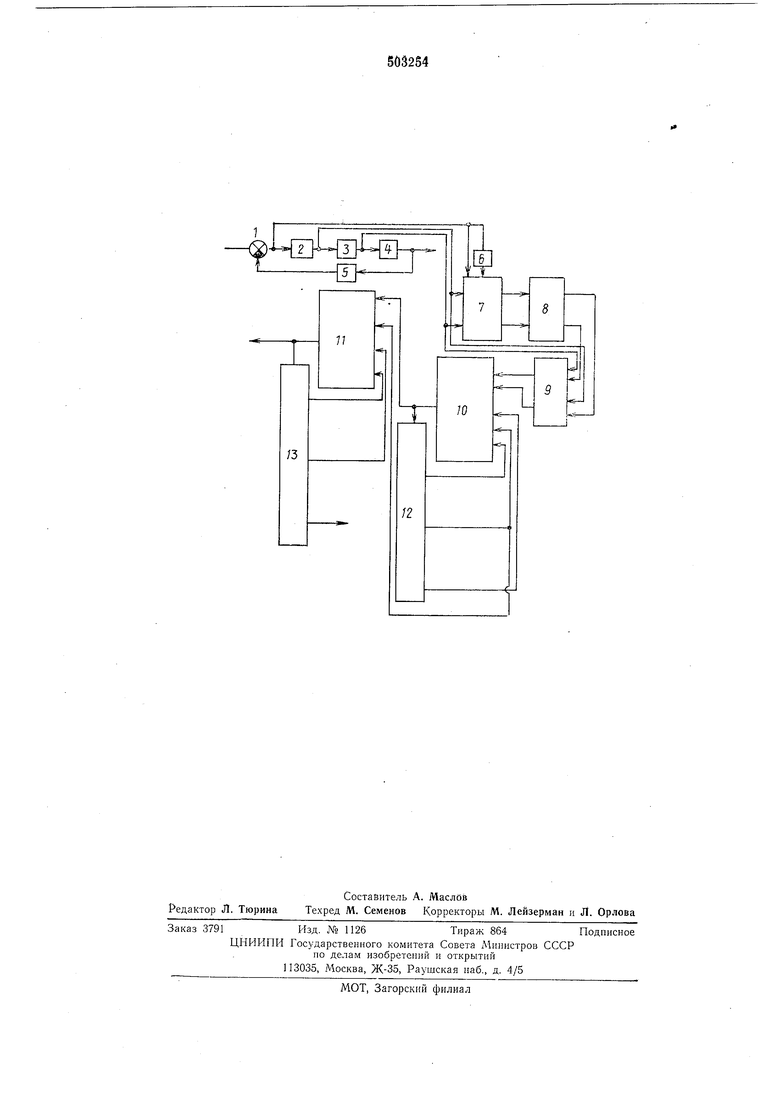
При ноявлении сигналов Аж и Ах соответственно на выходах элемента сравнения 1 и дифференцируюш,его элемента 6 логический элемент 7 отключает входы запоминаюш,их элементов 8, в результате чего с последних информация о нача.тьном состоянии САР, соответствующим моменту появления рассогласования Ах, поступает на сумматоры 9, которые, сравнивая ее с текущими значениями нараметров системы, выдают сигналы о малых отклонениях Af/ и А/г в замкнутой САР. Сумматор 10 и блок интеграторов 12 по мере поступления сигналов с сумматоров 9 в соответствии с линейиым дифференциальным уравнением исполнительного устройства выдает информацию о k-x производных от отклонения Д/г на выходе исполнительного блока 3, после чего производные от а-го но й-й порядок от отклонения А/г совместно с сигналом с выходов 1.1-х интеграторов (|.i 1..., п) блока интеграторов 13 преобразуют, согласно продифференцированному а раз линейному дифференциальному уравнению объекта регулирования 4 и измерительного блока 5, и подают на сумматор 11.
Таким образом, на выходе сумматора 11 получаютнепрерывнуюпроизводную
(tt-f а)-го юрядка от сигнала ошибки, а с выходов блока интеграторов 13 - непрерывные
производные с первого до (п + а-1) порядков от сигнала ошибки в замкнутой сАР.
Когда на выходах соответственно элемента сравнения 1 и дифференцирующего элемента 6
и Ах 0, логический элемент 7 подключает входы запоминающих элементов 8 к САР, вследствие чего сигиалы на выходе запоминающих элементов 8 повторяют текущие значения параметров САР, и с выходов сумматоf
ров 9 ностунают нулевые сигналы.
Формула изобретения
Устройство для дифференцирования
сигнала ошибки в замкнутых одноконтурных системах автоматического регулирования с пронорционально-дифференциальным законом управления, содержащее дифференцирующий элемент, два сумматора формирования малых
отклонений с подключенными соответственно к их первым входам двумя запоминающими элементами, сумматор формирования k-x нроизводных, сумматор формирования (л-fa)-и производной, первый блок интеграторов с (/г--1)-м последовательно включенными интеграторами и второй блок интеграторов с (п + а-1)-м последовательно включенными иптеграторами, элемент сравнения, выход которого соединен со входом блока управления, подключенного выходом ко входу исполнительного блока, выход которого через измерительный блок соединен с одним из входов элемента сравнения, подключен1юго другим входом ко входной клемме, устройства,
отличающееся тем, что, с целью расширения класса решаемых задач, оно содержит элемент «И, два входа которого непосредствепно и через дифференцирующий элемент подключены к выходу элемента сравнения, два других
входа соединены со вторыми входами соответствующих сумматоров формирования малых отклонений и соответственно с выходами блока управления и исполнительного блока, а два выхода элемента «И подсоединены ко входам соответствующих заноминающих элементов, выходы сумматоров формирования малых отклонений подключены к первому и второму входам сумматора формирования -х производных, остальные (k-1) входов и выход которого подсоединены соответственно к {k-1)-му выходу и ко входу первого блока интеграторов, один из входов сумматора формирования (и + а)-й производной подключен к выходу сумматора формирования k-x производных, т его входов подсоединены к соответствующим выходам первого блока интеграторов и п входов - к соответствующим выходам второго блока интеграторов, подключенного входом к выходу сумматора формирования (п + а)-и производной. .
HZ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПО ИНТЕГРАЛУ КОМПЕНСИРУЮЩЕГО ВОЗДЕЙСТВИЯ | 2003 |
|
RU2285281C2 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |