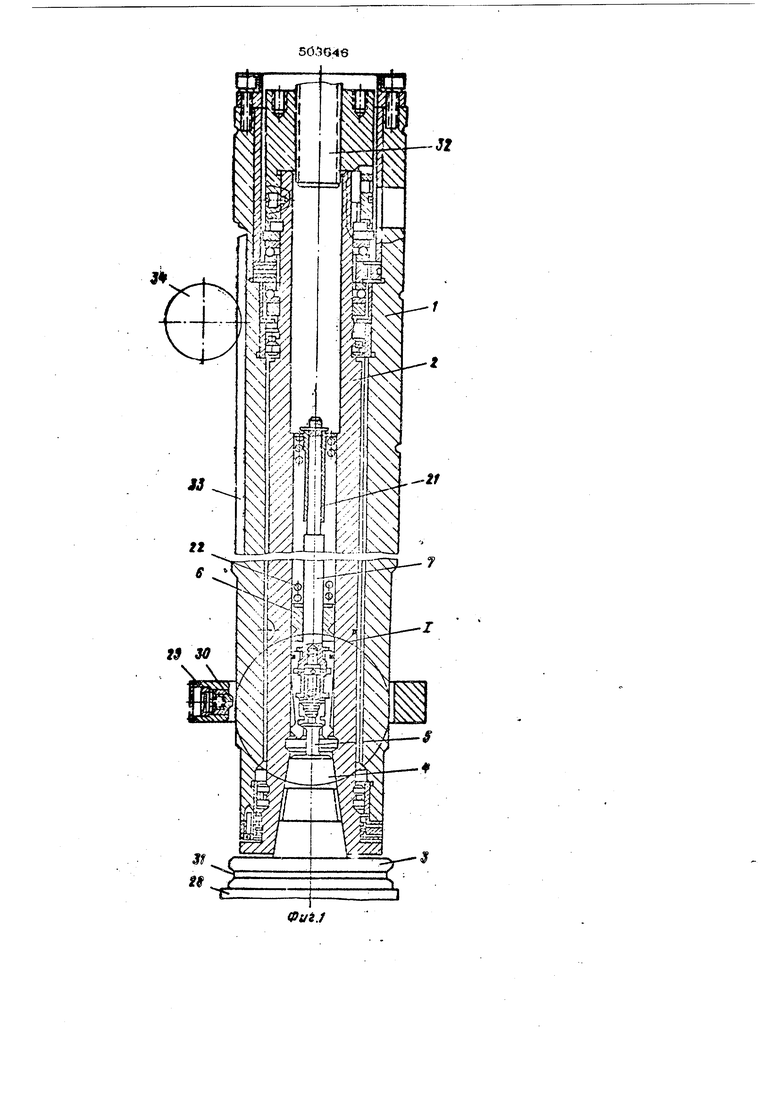
лен фиксатор 23 с пружиной 24 и контактирующими поверхностями 25 и 26. В кольцевой канавке 27 шпинделя 2 разме- шаются захватывающие .части 16 обхватывающих рычагов 12 при контакте выступов 13 с поверхностью 26 фиксатора 23. Инструмент 3 поверхностью 28, упирающейся в торец спутника 29, удерживается в нем фиксагором 30, вход$шшм в кольцевую 31. У верхней чпсти шпинделя подвижно уста овлен шлнцевый вал 32. На пиноли 1 имеется рейка 33, находящаяся в зацеплении с шестерней 34 привода перемещения пиноли. Устройство работает следующим, образом Привод перемещения пиноли через шестерню 34, рейку 33 перемещает пиноп 1 вниз, н конус шпинделя 2 наход) г на хвостовик 4 инструмента 3, находящегося в спутнике 29. При этом шток 7 отходит от шлоцевого вала 32. Головка 5 инструмента 4 -проходит между захв тывающими частями 16 обхватывающих рычагов 12 и нажимает на фиксатор 23, который, перемещаясь с поверхностью 26, освобождает выступ 13 рычагов 12 от контакта. Рычаги 12 через шток 7 под действием пружины 22, скользя ik; конической повер ности кольцевой канавки 27, сходгтся, захватывая головку 5 инструмента 3, и затягивают инструмент в конус шпинделя 2, Радиальное смещение штока 7, возникающее из-за его податливости, и связанное с этим пере щение конуса 11 рычагов 12 по конической поверхности 9 канавки 8 uiTOKa 7 обеспечивает равномерный контак всех четырех рычагов 12 с головками 5. Пиноль 1, перемешаясь дальше, снимает зажатый инструмент с фиксатора ЗО и выносит его из спутника 29 в зону обработк После окончания обработки для смены инструмента пинсль 1 перемещается вверх, инструмент 3 поверхностью 28 упирается п тооец спутника 9 и удерживается в спутнике фиксатором 30, входяиим в кольцевую KlHaBKy 31, а головкой 5 инструментЗ через обхватывающие рычаги 12 и шток 7 сжимает пружину 22, при этом обхватывающий рычаги 12 расходятся, входя захватывающими частями 16 в кольцевую канавку 27 шпинделя 2 и фиксируются через выступы 13 поверхностью 25 фиксатора 23. При верхнем положении пиноли 1 шток 7 верхним концом упирается в шлицевый пал 32,- сжимая пружину 22, П-ремещает обхватывающие рычаги 12, выступы 13 которых, перемешаясь под действием пружины 24, соприкасаются с поверхностью 26 фиксатора 23, а захватывающие части 16 рычагов 12, заходя полностью в кольцевую канавку 27, расхс-аятся, обеспечивпя проход головки инструмента 3 с зазором при захвате последнего в следующем цикле. Формула изобретения 1.Устройство для механизированного зажима инструмента в шпинделе моталлорежущего станка, в котором соединение хвостовика инструмента со штоком привода осевого перемещения осуществляется посредством обхватывающих рычагов, о т- личающееся тем, что, с целью упрощения конструкции и сокращения времени цикла смены инструмента, устройство снабжено подпружине.нным, подвижно установленным внутри штока фиксатором, контактирующим с выступами обхватывающих рычагов, 2.Устройство по п. 1, о т л и ч а ю щ е е с я тем, что, с целью обеспечения свободного прохода головки хвостовика инструмента между обхватывающими рычагами при 3axBiaTe, фиксатор выполнен ступенчатым.
19
Ф1/9.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельное устройство | 1974 |
|
SU467809A1 |
| Устройство для механизированного зажима концевого инструмента | 1979 |
|
SU889303A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| МЕХАНИЗМ ФИКСАЦИИ ИНСТРУЛ\ЕНТАЛЬНОЙ ОПРАВКИ С РАДИАЛЬНЫМ СУППОРТОМ В ШПИНДЕЛЕ СТАНКА | 1972 |
|
SU348301A1 |
| ПОЛУАВТОМАТ ДЛЯ ЗАТОЧКИ МНОГОЛЕЗВИЙНОГО | 1971 |
|
SU309582A1 |
| Полуавтомат для заточки многолезвийного инструмента с прямыми и винтовыми стружечными канавками | 1968 |
|
SU300047A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструментов на металлорежущем станке | 1978 |
|
SU1036238A3 |
| Расточная головка | 1973 |
|
SU477784A1 |