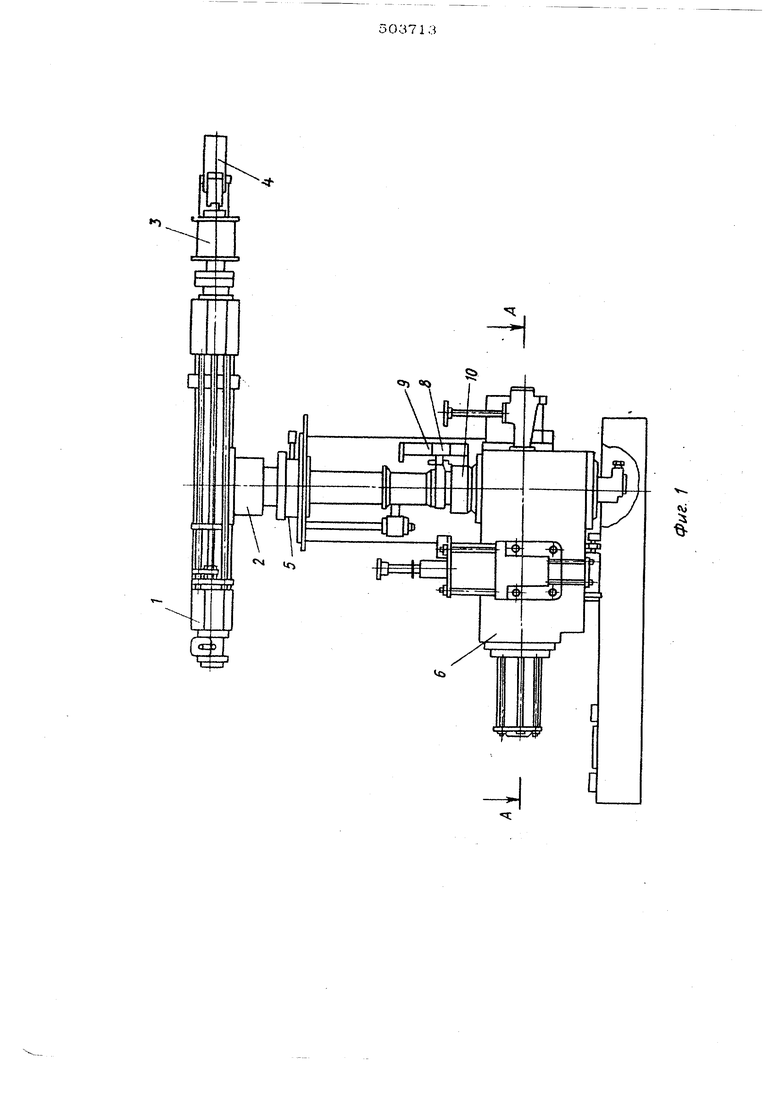
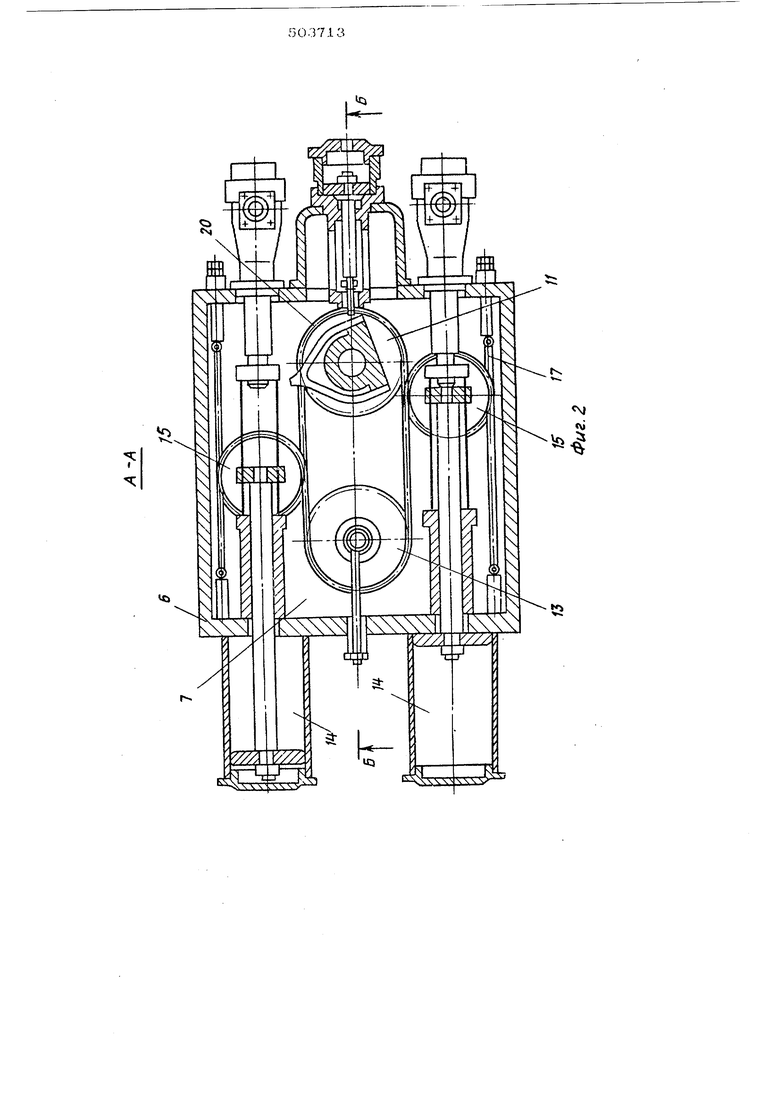
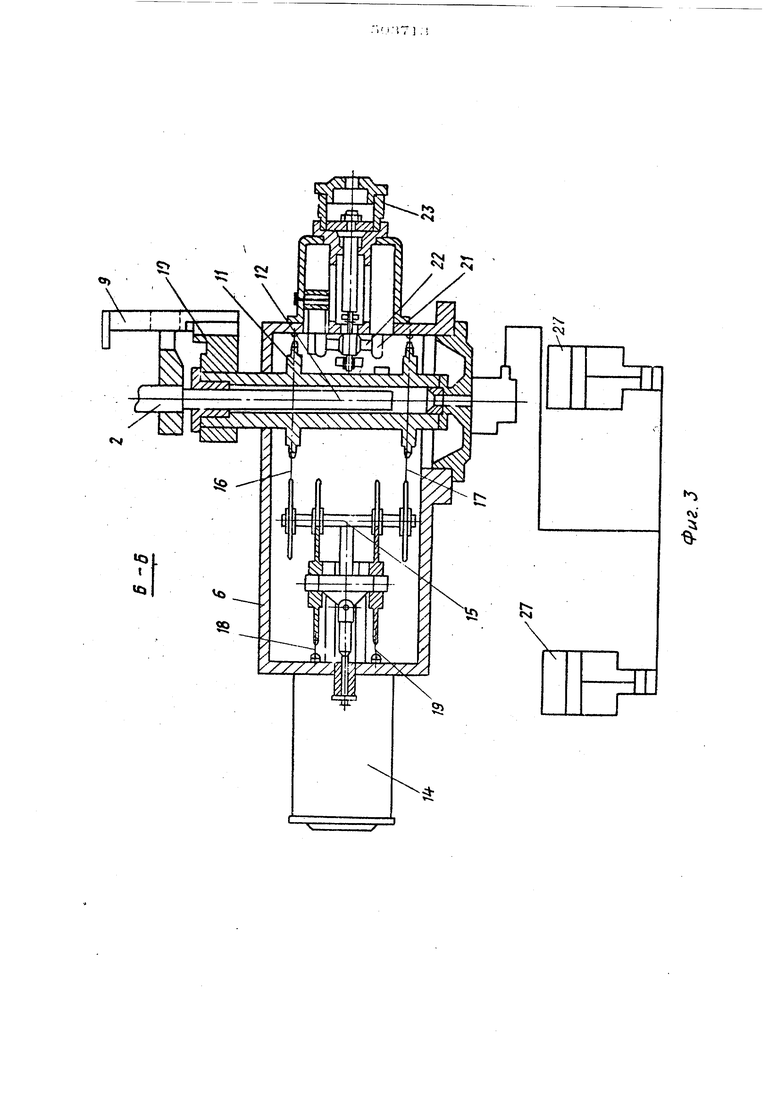
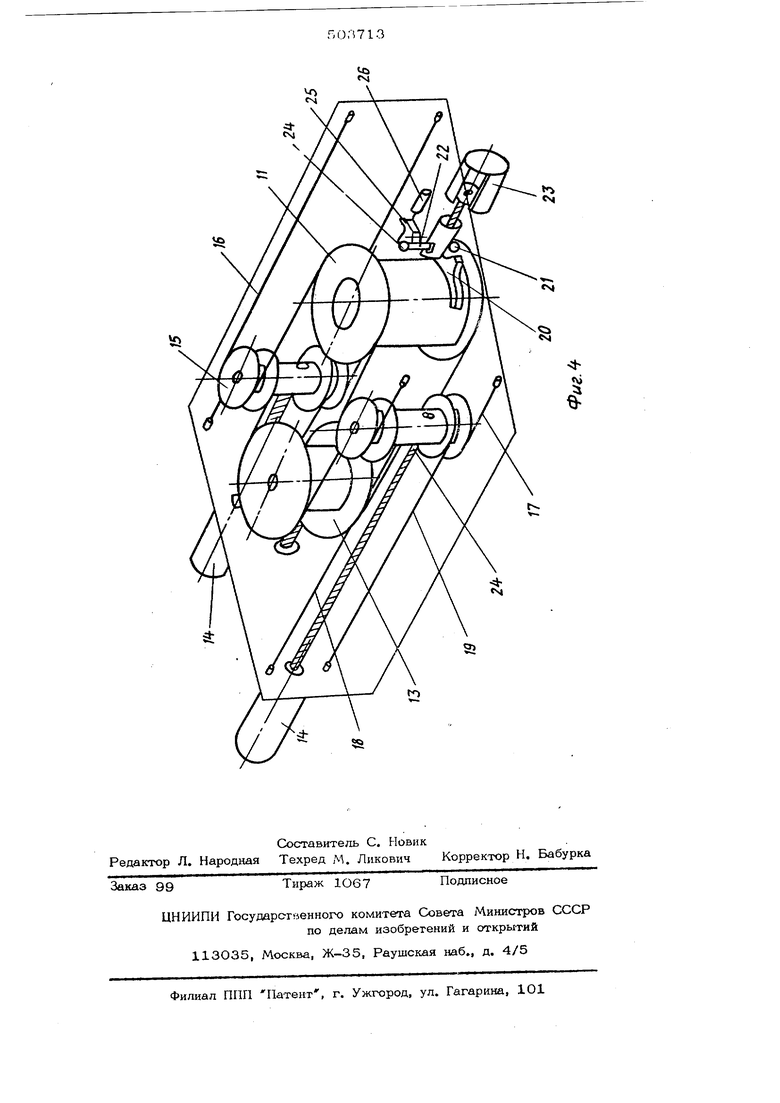
шейку блока 11 двух одинаковых. звездочек, усгановленкого в подшипниках в корпусе б механизма поворота 7. Полость блока 11 является полостью гид оцилиндра, в которую входит плунжер 12, вьгаопнеиный за одно целое с вертикальным валом 2. В корпусе 6 помещен также блок 13 .двух свободно вращающихся на валу звездочек, идентичных звездоч кам блока 11. Блок 13 является, натяжным устройств Параллельно линии центров блоков 11 13 установлены два пневмоцилиндра 14, на штоке каждого из которых устьновлен промежуточный блок 15 с четырьмя одина ковыми свободно вращающимися на общем валу звeздoчкd ш. Верхняя цепь 16 укреп лена обоими концами на корпусе 6 и обхватывает верхние звездочки блоков 15 и верхнюю звездочку блока 11. Точно та|1им же образом крепится к корпусу 6 и обхва тывает нижние звездбчки тех же блоков цепь 17. Цепи 18 и 19 также крепятся обоими концами к корпусу б, обхватывая последовательно звездочки блоков 15 и 1-3. В средней части блока 11 установлен кулачок 20, который может упираться в нижний ролик 21 рычага 22. I Таким образом, вал блока 11 является кулачковым валом. Средняя часть рычага 22 установлена шарнирно на Штоке пнев- моцили1Щра 23 и зафиксирована на нем в осевом направлении. Верхний ролик 24 рычага 22 воздействует, на левый либо правый выступ рычага 25, установленного на вертикальной оси. Рычаг 25 при повороте упирается в жесткий регулируемый упор 26. Полость блока 11 (кулачкового вала) связана одновременно с гидрюцилиндрами двух одинаковых пневмогидравлических, мультипликаторов 27, которые крепятся в любом удобном месте на манипуляторе. МанипулЯтор работает следующим образом. При подаче воздуха в левую полость одного пневмоцилиндра 14 (например, вер него на фиг, 2) и в правую другого пневмоцилиндра 14 вместе со штоками начина пе сзмешаться блоки 15 звездочек; верхний блок - вправо, нижний - влево. Нижни из них вытягивает за собой цепи 1.6 и 17 ведомые ветви которых движутся с линейной скоростью, в два раза большей скорос ти щтока пневмоцилиндра 14. Цеги 16 и 17поворачивают блок 11 звездочек (кулачковый вал) по часовой стрелке. Цепи 18и 19, которые вытяпгааюгся верхним (фиг. 2) блоком 15 звездочек, поворачивают звездочки блока 13. При этом усилия на ведомых ветвях цепей 18 и 19 складываются на Ш1жнем блоке 15 с усилием на штоке соответствующего цилиндра 14. При подаче воздуха в противоположные полости ЦИЛИ1ЗДРОВ 14 поворот блока 11 (кулачкового вала) осуществляется в другую сторону. Таким образом, при движении в любую сторону работают оба пневмоцилиндра вместе, что дает возможность уменьщкть их диаметр. Цепная передача дает возможность сообщать небольшую длину хода пневмоцилиндру и компактность механизму поворота 7 вцелом. При повороте блока 11 звездочек вместе с ним поворачивается хомут 10 с рейкой 9 (см. фиг. 3), который через ролики 8 поворачивает вертикальный вал 2 с рукой 1. При подаче BO3ziyxa в левую полость цилиндра 23 его щток вместе с рычагом 22 занимает крайнее правое положение, и при повороте блока 11 кулачок 20 проходит мимо нижнего ролика 21 рычага 22, не задевая его. При подаче воздуха в правую полость пневмоцилнндра 23 его Щток вместе с рычагом 22 занимает крайнее левое положение, и при повороте блока 11 из одного либо другого крайнего положения кулачок 2О наезжает на нижний ролик 21 рычага 22, последний поворачивается относительно оси штока пневмоцилиндра 23, воздействуя на левый либо правый выступ рычага 25, который, поворачиваясь относительно вертикалыюй оси, наезжает на упор 26. Таким образом, при повороте Относиельно вертикальной оси рука 1 останавливается в про межуточном положении. При необходимости иметь неско;шко промежуочных положений остановки может быть становлено несколько пн вмопишндров 23 с рычагами 22, При кгеобхЬдимости продолжить движение воздухе .подае-тся в 1евую полость цилиндра 23, шток смещатся вправо, и ролик рычага, смещаясь месте со штоком, прюпускает кулачок 20. Продольное перемещение руки 1 осуествляется от гидроцилиндра, корпусом оторого является полый кулачковый вал (блок 11), а поршнем - плунжер 12 вала, Формула изобретения 1. Ма 1ипулятор для подачи заготовок в рабочую зону, содерлсаший расаоложеииуил на «ортикалыюм валу руку и iii-iiBoabi ео продольного перемещения и поворота, о г л 11 ч а ю 1ц н и с я тем, что, с целью уменьшения габаригов манипулятора с одновременным расширением технологических возможностей, привод поворота руки выполнен в виде системы гибких элементов, подвижных от силовых цилиндров промежуточных блоков, натяжного устройства и полого кулачкового вала, одна част элементов указанной системы огибает промежуточные блоки и натяжное устройство,
часть огибает те же блоки и кулачковый вал, а привод продольного перемещения руки выполнен в виде силового цилиндра, корпусом которого служит полый кулач ковый вал, а поршнем - вал руки.
2.Манипулятор по п. 1, о т л и ч а- п щ и fi с я тем, что гибкие элементы выполнены в виде иепей,
3.Маиипулигор по пп, 1 и 2, о т личающийся тем, что каждая
часть указанной системы содержит две цепи.
«v
Т
ч
0 у F
) л
ч
s
5
ro
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1977 |
|
SU611774A1 |
| Манипулятор для раздельного съема отливок и литниковой системы | 1980 |
|
SU865515A1 |
| Устройство для шлифования деталей из древесины | 1983 |
|
SU1094725A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| Ленточно-шлифовальный станок | 1977 |
|
SU704765A2 |
| Ленточно-шлифовальный станок | 1976 |
|
SU611763A1 |
| Автомат для мерной резки проводов и зачистки их концов от изоляции | 1983 |
|
SU1128321A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор | 1979 |
|
SU831607A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАТЯЖКИ СУКОН | 1965 |
|
SU175387A1 |