(54) РУКА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1984 |
|
SU1247265A1 |
| Захват | 1977 |
|
SU663577A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Захват | 1977 |
|
SU667396A1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
I
Изобретение относится к технологическому оборудованию, применяемому для автоматизации и механизации технологических процессов, и может быть использовано в конструкции промышленных роботов и манипуляторов.
Известна рука манипулятора, содержащая кисть со схватами, выполненную в виде пантографа, имеющего ролик на конце одного из рычагов, клин, установленный в корпусе кисти, привод схвата, например, в виде силового цилиндра и привод поворота кисти 1.
Недостатком известной руки манипулятора является наличие на подвижной кисти двух приводов и необходимость подводки к этим приводам, в зависимости от типа привода; воздуха или рабочей жидкости, что делает конструкцию сложной и ненадежной.
Цель изобретения - упрощение конструкции и повыщение надежности.
Указанная цель достигается тем, что рука манипулятора снабжена толкателем, щарнирно связанным со щтоком силового цилиндра, и барабаном со сквозным радиальным пазом под толкатель, причем корпус силового цилиндра,жестко связан с барабаном, корпус кисти установлен соосно этому барабану с возможностью поворота вокруг его оси, а на корпусе кисти выполнены отверстия под клин.
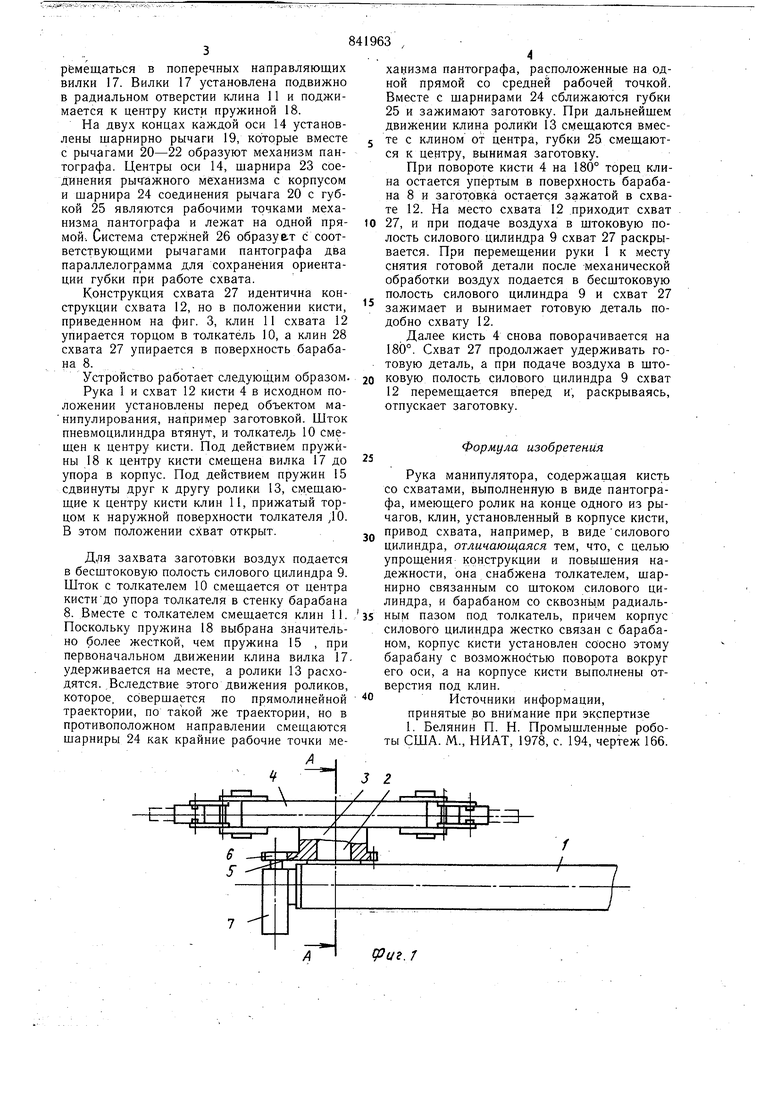
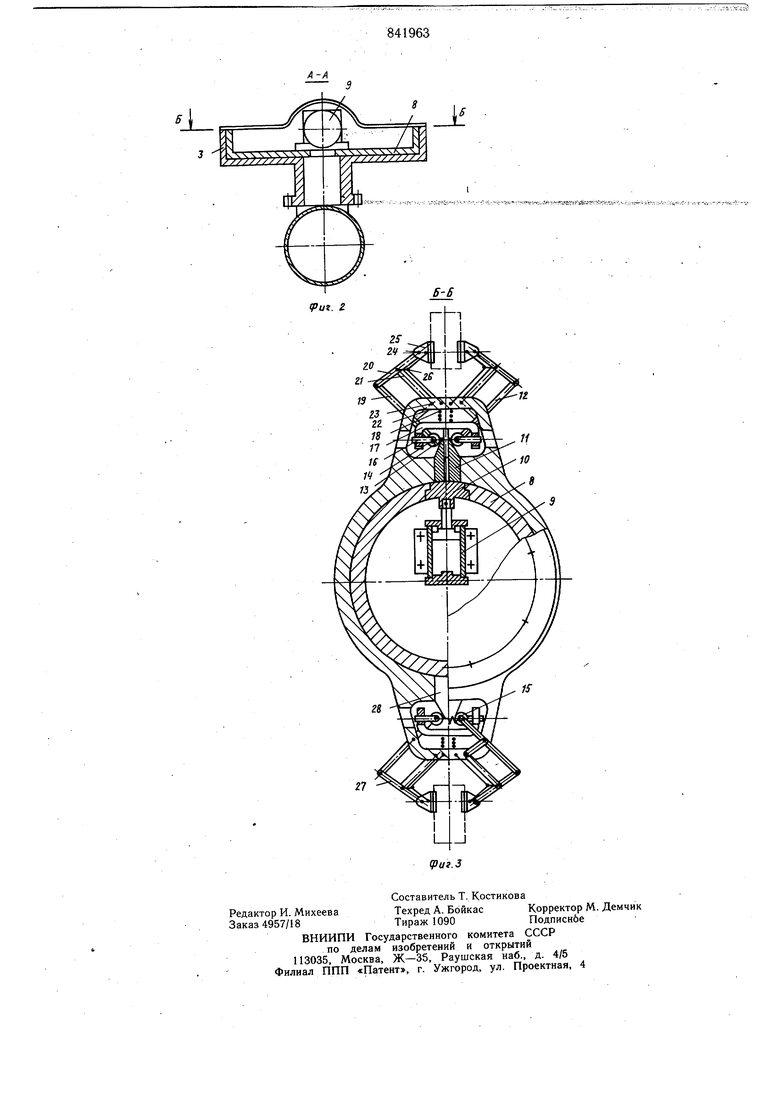
На фиг, 1 изображена рука манипулятора, несущая кисть с двумясхватами, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
Рука 1 имеет ось 2, на которой установлен корпус 3 кисти 4 с возможностью поворота вокруг этой оси. Зубья 5 на фланце корпуса 3 входят в зацепление с щестерней 6 привода 7 поворота кисти, который установлен неподвижно на руке 1. Соосно корпусу 3 установлен барабан 8, с которым жестко связан силовой цилиндр 9 схватов.
В стенке барабана 8 напротив щтока силового цилиндра 9 имеется сквозной радиальный паз, в который может входить толкатель 10. Наружная поверхность толкателя 10 и наружная поверхность барабана 8 выполнены одним радиусом. Клин 11 схвата 12 установлен подвижно в радиальном отверстии в корпусе 3. В клин 11 упираются два ролика 13, оси 14 которых стягиваются друг к другу пружинами 15. Оси 14 установлены в стержнях 16, которые могут перёмещаться в поперечных направляющих вилки 17. Вилки 17 установлена подвижно в радиальном отверстии клина 11 и поджимается к центру кисти пружиной 18. На двух концах каждой оси 14 установлены шарнирно рычаги 19, которые вместе с рычагами 20-22 образуют механизм пантографа. Центры оси 14, шарнира 23 соединения рычажного механизма с корпусом и шарнира 24 соединения рычага 20 с губкой 25 являются рабочими точками механизма пантографа и лежат на одной прямой. Система стержней 26 образуе-т с соответствующими рычагами пантографа два параллелограмма для сохранения ориентации губки при работе схвата. Конструкция схвата 27 идентична конструкции схвата 12, но в положении кисти, приведенном на фиг. 3, клин И схвата 12 упирается торцом в толкатель 10, а клин 28 схвата 27 унирается в поверхность барабана 8. Устройство работает следующим образом. Рука 1 и схват 12 кисти 4 в исходном положении установлены перед объектом манипулирования, например заготовкой. Шток пневмоцилиндра втянут, и толкател ь 10 смещен к центру кисти. Под действием пружины 18 к центру кисти смещена вилка 17 до упора в корпус. Под действием пружин 15 сдвинуты друг к другу ролики 13, смещающие к центру кисти клин И, прижатый торцом к наружной поверхности толкателя JO. В этом положении схват открыт. Для захвата заготовки воздух подается в бесщтоковую полость силового цилиндра 9. Шток с толкателем 10 смещается от центра кистиДО упора толкателя в стенку барабана 8. Вместе с толкателем смещается клин 11. Поскольку пружина 18 выбрана значительно более жесткой, чем пружина 15 , при первоначальном движении клина вилка 17 удерживается на месте, а ролики 13 расходятся. .Вследствие этого движения роликов, которое, совершается по прямолинейной траектории, по такой же траектории, но в противоположном направлении смещаются щарниры 24 как крайние рабочие точки механизма пантографа, расположенные на одной прямой со средней рабочей точкой. Вместе с шарнирами 24 сближаются губки 25 и зажимают заготовку. При дальнейшем движении клина ролики 13 смещаются вместе с клином от центра, губки 25 смещаются к центру, вынимая заготовку. При повороте кисти 4 на 180° торец клина остается упертым в поверхность барабана 8 i заготовка остается зажатой в схвате 12. На место схвата 12 приходит схват 27, и при подаче воздуха в штоковую полость силового цилиндра 9 схват 27 раскрывается. При перемещении руки 1 к месту снятия готовой детали после механической обработки воздух подается в бесщтоковую полость силового цилиндра 9 и схват 27 зажимает и вынимает готовую деталь подобно схвату 12. Далее кисть 4 снова поворачивается на 180°. Схват 27 продолжает удерживать готовую деталь, а при подаче воздуха в штоковую полость силового цилиндра 9 схват 12 перемещается вперед и, раскрываясь, отпускает заготовку. Формула изобретения Рука манипулятора, содержащая кисть со схватами, выполненную в виде пантографа, имеющего ролик на конце одного из рычагов, клин, установленный в корпусе кисти, привод схвата, например, в виде силового цилиндра, отличающаяся тем, что, с целью упрощения конструкции и повыщения надежности, она снабжена толкателем, щарнирно связанным со штоком силового цилиндра, и барабаном со сквозным радиальным пазом под толкатель, причем корпус СИЛОВОГО цилиндра жестко связан с барабаном, корпус кисти установлен соосно этому барабану с возможностью поворота вокруг его оси, а на корпусе кисти выполнены отверстия под клин. Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы США. М., НИАТ, 1978, с. 194, чертеж 166.
