(54) МАНИПУЛЯТОР ДЛЯ РАЗДЕЛЬНОГО СЪЕМА ОТЛИВОК И ЛИТНИКОВОЙ СИСТЕМЫ
1
Изобретение относится к оборудованию для автоматизации вспомогательных технологических операций, и в частности к литью металлов и сплавов.
Известно устройство для съема отливок при литье под давлением, содержащее ци- . линдр привода вертикального перемещения и съемник, закрепленный на щтоке цилиндра, где стэемник вь1полнен в виде углового рычага, вершина которого закреплена на щтоке с возможностью поворота вокруг оси крепления, а горизонтальное плечо рычага шар- JQ нирно связано со штангой, снабженной упором и установленной на корпусе с возможностью продольного перемещения, причем упор на штанге выполнен регулируемым по высоте, а горизонтальное плечо рычага выполнено подпружиненным 1.
Однако его нельзя использовать для раздельного съема отливок и литниковой системы.
Наиболее близким к предлагаемому является манипулятор для подачи отливок 20 в рабочую зону, содержащий силовые цилиндры и руку ее горизонтального и вертикального перемещения 2.
Однако упомянутый манипулятор имеет сложный механизм поворота руки, который трудоемок в изготовлении и снижает производительность манипулятора. Кроме того, наличие гибких элементов снижает со временем точность позиционирования, так как последние во время эксплуатации манипулятора изнащиваются и растягиваются, причем для устранения указанного недостатка требуется периодический осмотр манипулятора и его переналадка, что требует дополнительных трудозатрат и снижает производительность манипулятора по причине его простоя.
Цель изобретения - упрощение конструкции, повышение производительности и точности позиционирования манипулятора.
Поставленная цель достигается тем, что манипулятор для раздельного съема отливок и литниковой системы, содержащий руку и силовые цилиндры ее горизонтального и вертикального перемещения, снабжен плитой с фигурным пазом и кронштейном, а рука манипулятора закреплена на штоке силового цилиндра горизонтального перемещения, который снабжен рычагом-копиром, взаимодействующим с фигурным пазом
плиты, закрепленной на кронштейне, установленном с возможностью продольного перемещения.
Кроме того, плита с фигурным пазом выполнена подпружиненной.
Установка руки манипулятора на штоке силового цилиндра горизонтального перемещения, который имеет рычаг-копир, взаимодействующий с фигурным пазом плиты дает возможность значительно упростить конструкцию манипулятора, так как в этом случае из него исключаются: система гибких элементов, выполненных в виде цепей, и промежуточных блоков, а также натяжное устройство и полый кулачковый вал. В результате устранения гибких элементов увеличивается точность позиционирования манипуляторд.
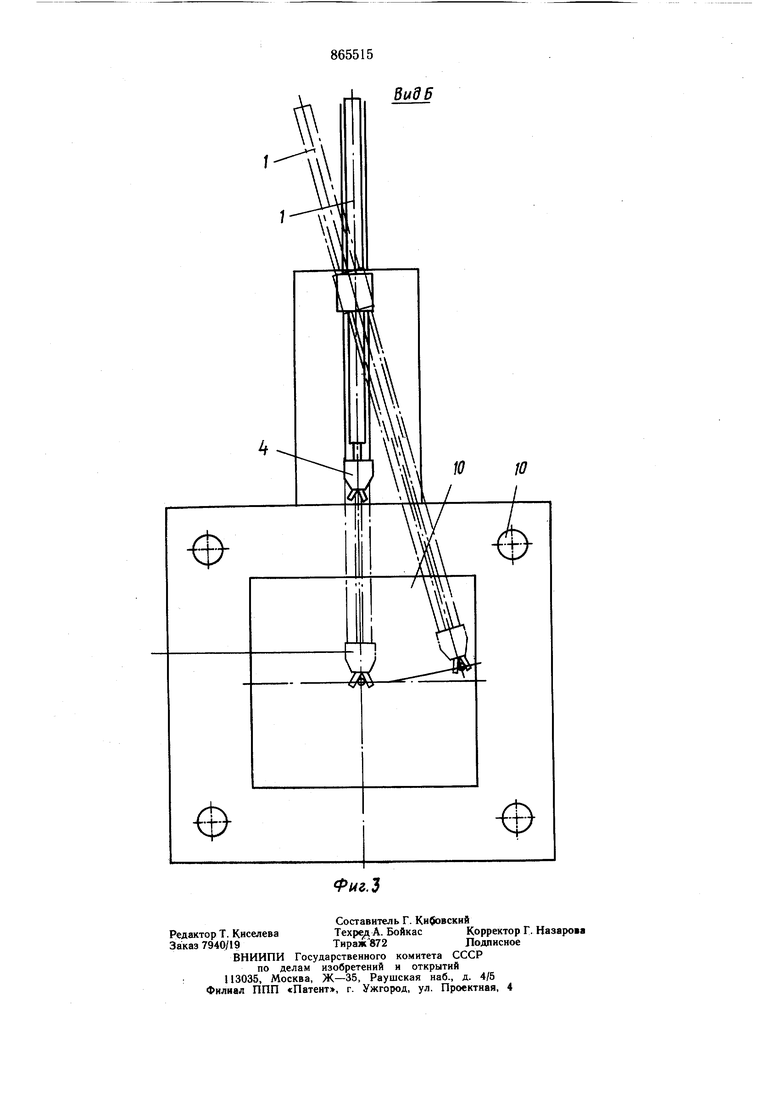
На фиг. 1 изображен предлагаемый манипулятор, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Манипулятор состоит из руки 1, закрепленной на штоке 2 пневмоцилиндра 3 горизонтального перемещения, захвата 4, пневмоцилиндра вертикального перемещения, установленного внутри руки 1 (не показан), механизма поворота руки, включающего паз 5, выполненный в плите 6, кронштейн 7 и рычаг-копир 8. Манипулятор установлен на неподвижной плите 9 литьевой машины 10 содержащей полуформы 11, с отливкой 12 и литвиком 13.
Манипулятор работает следующим образом.
После необходимой выдержки происходит размыкание полуформ 11, рука 1 манипулятора входит в пространство между полуформами и с помощью захвата 4 принимает отливку 12, выталкиваемую из полуформы 11 выталкивателя за литник 13.
Затем включается пневмоцилиндр 3 го ризонтального перемещения, под действием пневмоцилиндра 3 рука 1 манипулятора снимает отливку 12, которая отделяется от литниковой системы и сбрасывается в тару.
При дальнейшем горизонтальном перемещении рука 1 манипулятора поворачивается под действием рычага-копира 8, закрепленного на штоке 2, пневмоцилиндра 3 и фигурного паза 5 на угол, который образуется подпружиненной плитой 6 и кронштейном 7, совершающим продольное перемещение. Осуществив поворот на заданный угол, рука 1 манипулятора втягивается пневмоцилиндром вертикального перемещения, установленным в руке 1, захват 4 раскрывается и литниковая система сбрасывается в отдельную тару. После этого опять включается пневмоцилиндр 3 горизонтального перемещения и рука 1 занимает первоначаль ное положение, и рабочий цикл повторяется.
Предлагаемое изобретение позволит упростить конструкцию манипулятора, увеличить его быстродействие и точность позиционирования.
Формула изобретения
1.Манипулятор для раздельного съема отливок и литниковой системы, содержащий руку и силовые цилиндры ее горизонтального и вертикального перемещения, отличающийся тем, что, с целью упрощения конструкции, повышения производительности и точности позиционирования манипулятора, он снабжен плитой с фигурным пазом и кронштейном, а рука манипулятора закреплена на штоке силового цилиндра горизонтального перемещения, который снабжен рычагом-копиром, взаимодействующим с фигурным пазом плиты, закрепленной на кронштейне, установленном с возможностью продольного перемещения.
2.Манипулятор по п. 1, отличающийся тем, что плита с фигурным пазом выполнена подпружиненной.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 509336, кл. В 22 D 17/22, 1976.
2.Авторское свидетельство СССР № 503713, кл. В 25 I 11/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для литья под давлением | 1979 |
|
SU846084A1 |
| Линия для изготовления отливок | 1978 |
|
SU753532A1 |
| Кокильный карусельный комплекс | 1990 |
|
SU1720791A1 |
| КОКИЛЬНЫЙ МОДУЛЬ ДЛЯ ИЗГОТОВЛЕНИЯ ЖЕЛЕЗОАЛЮМИНИЕВЫХ ОТЛИВОК | 1994 |
|
RU2062681C1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Установка для литья под низким давлением | 1986 |
|
SU1397168A1 |
| Кокильная машина | 1987 |
|
SU1588494A1 |
| ЭКСТРУЗИОННО-РАЗДУВНАЯ ФОРМОВОЧНАЯ МАШИНА | 2001 |
|
RU2186683C1 |
| Многогнездная прессформа для литья под давлением | 1981 |
|
SU944778A1 |
| Манипулятор для удаления отливок из машин литья под низким давлением | 1984 |
|
SU1243896A1 |