1
Изобретение относится к мацги вострое- ниЮ( а именно, к манипуляторам для автоматизации вспомогательных операций на машиностроительных предприятиях при выполнении пластической деформации, механиче- ской обработки, литья под давлением и сборки.
Известен манипулятор для автоматизации вспомогательных операций, который содержит кисть со охватом, установленную на конце механической руки l .
Манипуля-тор имеет сложную конструкцию...
Наиболее близок к предлагаемому изобретению манипулятор, который содержит механическую руку с кистью, установленной на одном конце и соединенной с механизмом поворота, расположенном на другом её конце, и упоры 2.
Известный манипулятор имеет сложную конструкцию и низкую точность позиционирования.
Цель изобр етения -упрощение конструкции и повышение точности позиционирования.
Достигается она тем, что вал механизма поворота снабжен дисками, между которыми установлен с возможностью вращения вокруг его оси рычаг, связанный с этими дисками и упорами.
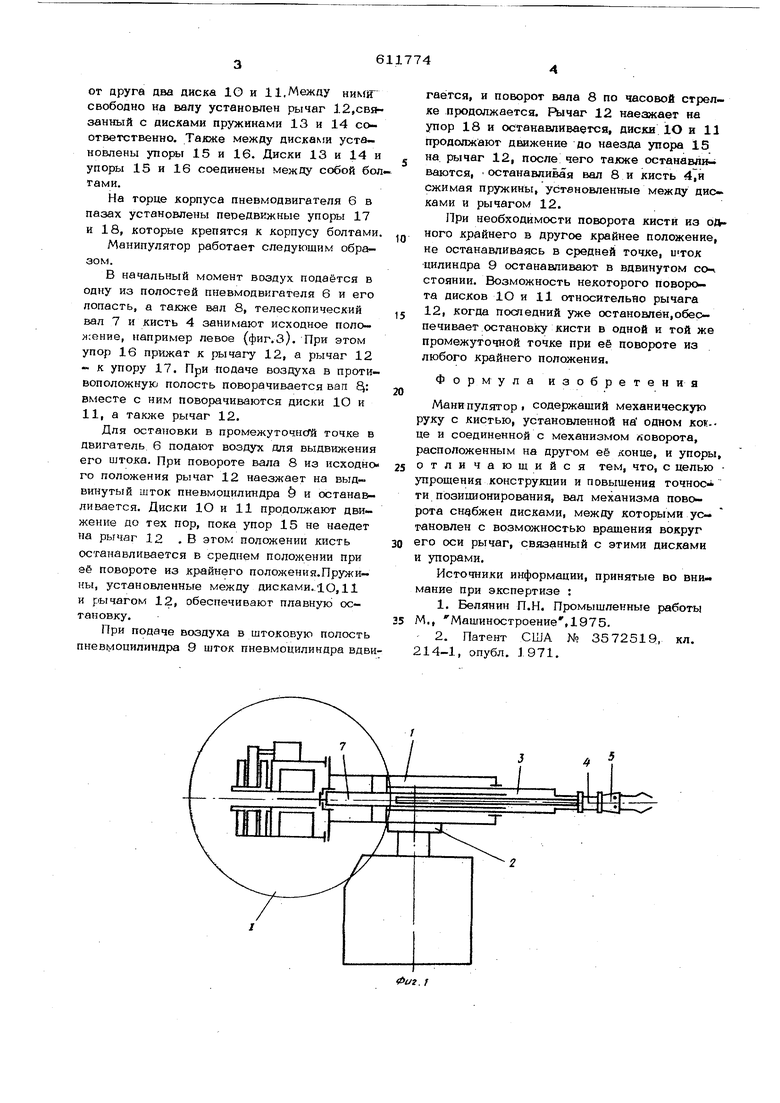
На фиг. 1 изображен описываемый мани пулятор, общий вид ; на фиг.2 - механизм поворота в разрезе (узел на фиг.l),.- на фиг 3 - разрез на фиг. 2.
Манипулятор содержит механическую руку 1, установленную на вертикальном валу 2. Рука содержит пневмоцилиндр, на одном конце штока 3 которого устано15лена кисть 4 со схватом 5. На другом конце руки установлен механизм поворота кисти, нап- ример моментный поворотный пневмодви- гатель 6. Вал механизма поворота состоит из шлицевого телескопического вала 7 и со единенного с ним попЬго вала 8, на котором укреплена лопасть поворотного пневмоцвигателя 6. Шлицевой телескопический вал 7 проходит внутри полого штока 3 и соединен с кистью 4. На корпусе двигателя 6 установлен пневмоцилипдр 9. На валу 8 жестко установлены на некотором расстоятгии друг
or друга два диска 1О и Ц,Между нимг свободно на валу установлен рычаг 12,св$ь занный с дисками пружинами 13 и 14 соответсгвенно. Также между дискакш установлены упоры 15 и 16. Диски 13 и 14 и упоры 15 и 16 соединены между собой болтами.
На горце корпуса пневмодвигателя 6 в пазах установлены передвижные упоры 17 и 18, которые крепятся к корпусу болтами
Манипулятор работает следующим образом.
В начальный момент воздух подаётся в одну из полостей пневмодвигателя 6 и его лопасть, а также вал 8, телескопический вал 7 и кисть 4 занимают исходное поло- ;ение, например левое (фиг.З). При этом упор 16 прижат к рычагу 12, а рычаг 12 - к упору 17. При подаче воздуха в противоположную полость поворачивается вал Q: вместе с ним поворачиваются диски 1О и 11, а также рычаг 12.
Для остатювки в промежуточнйй точке в двигатель 6 подают воздух для выдвижения его штока. При повороте вала 8 из исходно го положения рычаг 12 наезжает на выдвинутый шток пневмрцилиндра & и остана&ливается. Диски 1О и 11 продолжают движение до тех пор, пока упор 15 не наедет на рычаг 12 .В этом положении кисть останавливается в среднем положении при её повороте из крайнего положения.Пружины, установленные между дисками.Ю, 11 и рычагом 12, обеспечивают плавную остановку.
При подаче воздуха в штоковую полость пневмоцилиндра 9 шток пневмоцилиндра вдвигаётся, и поворот вала 8 по часовой стрелке продолжается. 12 наезжает на упор 18 и останавливается, диски 1О и 11 продолжают движение до наезда упора 15 на рычаг 12, после чего также останавливаются, Останавливая вал 8 и кисть 4,и сжимая пружины, установленные между дис- ками и рычагом 12.
При необходимости поворота кисти из oftного крайнего в другое крайнее положение, не останавливаясь в средней точке, и-ток цилиндра 9 останавливают в вдвинутом со стоянии. Возможность некоторого поворота дисков 1О и 11 относительно рычага 12, когда последний уже остановлен,обеспечивает остановку кисти в одной и той же промежуточной точке при её повороте из любого крайнего положения.
Формула изобретения
Манипулятор i содержащий механическую руку с кистью, установленной на одном кок-це и соединенной с механизмом поворота, расположенным на другом её конце, и упоры, отличающийся тем, что, с целью упрощения конструкции и повышения точное ти позиционирования, вал механизма поворота снабжен дисками, между которыми установлен с возможностью вращения вокруг его оси рычаг, связанный с этими дисками и упорами.
Источники информации, принятые во внимание При экспертизе :
1.Белянин П.Н. Промышленные работы М., Машиностроение,1975.
2.Патент США № 3572519, кл. 214-1, опубл. 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU503713A1 |
| Манипулятор | 1976 |
|
SU598753A1 |
| Манипулятор | 1977 |
|
SU611773A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| РОТОРНАЯ УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ГОРЯЧИХ ПОКРЫТИЙ | 1992 |
|
RU2049147C1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |

