(54) УСТРОЙСТВО ДЛЯ НАСТРОЙКИ РАБОЧИХ ОРГАНОВ РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU721060A2 |
| Устройство для автоматической настройки рабочего органа рыборазделочной машины | 1980 |
|
SU921493A1 |
.. 1 . .
Изобретение относится к области механизации и автоматизации про
.цессов обработки рыбы и может быть использовано в устройствах для автоматической разделки различных пород рыб.
Известно устройство для настрой-г ки рабочих органов рыборазделочной машины, которое содержит рычаг для обмера тела рыбы по высоте,.эксцентриковый механизм с профилем, соответствующим Изменению толщины позвоночника от хвоста к голове, и спаренные дисковые ножи, которые укреплены с возможностью перемещения по вертикёши и связаны с рыча.гом для обмера тела рыбы и эксцентриковым механизмомпосредством шарнирно-рычажной системы 1,
Наличие в устройстве инерционных кинематических связей и механизма с профилем не обеспечивает высокой производительности выполнения требуемых опё заций и затрудняет перенастройку устройства при,переходе на обработку одной , породы рыбы на другую.
Наиболее близким техническим решением к данному изобретению явлйется устройство, содержащее, два датчикалинейных размеров рыбы, реверсивный счетчик импульсов, преобразователь непрерывной величины- во временной интервал,- распределитель импульсов с генератором, систему управления исполнита)7ьным механизмом и вычислительным блоком и нелинейный блок,подключенный входами к
10 датчикам линейных размеров рыбы и , выходу вычислительного блока, а выходом - к преобразователю непрерывной величины во временной интервал 2,15
Недостатками известного устройства , настройки рабочего органа рыбораздело ой машины являются ограниченные функциональные возможноети и невысокое качество разделки
20 рыбы при выполнении других операций, не связанных с отрезанием брюшной полости рыбы, .
Целью изобретения является расширение функциональных возможностей
Цель достигается тем, что в устройство для настройки органов рыборазЬелочной машины, содержа
30
ёе два посдедовательно установленных по ходу конвейера рыборазделочной машины датчика линейных размеов рыбы, распределитель импульсов с,генератором и систему управления сполнительным механизмом, включагаую- вычислительный блок, дополниельно введен блок генераторов имульсов, соединенный через селектоы-мульти плексеры с входом системы правления исполнительным механизом, а вход генератора распределитея импульсов связан с выходом второо датчика линейного размера рыбы.
Такое выполнение устройства при использовании его в различных узлах рыборазделочной машины позволяет Осуществит такие операции разделки рыбы, как вырезание плавников, отрезание брюшной полости и т.д.
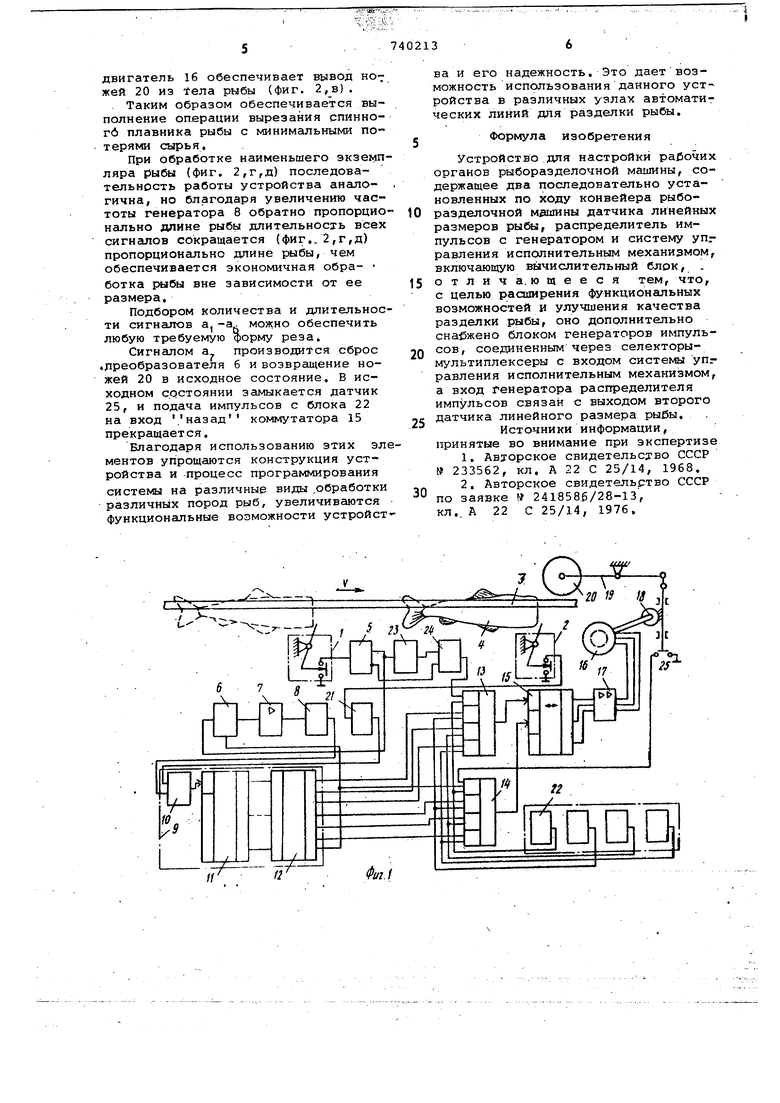
На фиг. 1 изображена принципиальная блок-схема устройства; на фиг.2диаграммы сигналов в устройстве,
Устройство для настройки рабочих органов рыборазделочной машины включает в себя два датчика 1 и 2 длины рыбы, Ксокдый из которых состоит из измерительного рычага и выключателя, установленных один от другого по ходу, движения конвейера 3 на расстоянии, превышающем длину наибольшей из обрабатываемых рь1б 4. Выход датчика 1 через формирователь 5, преобразователь б временного интервала в аналоговую величину и согласующий элемент 7 подключен к входу генератора 8 управляемой частоты, выход которого подключен к распределителю 9, Последний содержит конъюнктор до, счетчик 11 импуль.сов, шифратор12, выходы которого через селекторы-мультиплексеры 13 и 14 подключены к входам вперед назад коммутатора 15 шагового двигателя 16.
Шаговый двигатель 16, подкяю енный через усилитель 17 к выходам коммутатора 15, посредством реечной пары 18 и рычага 19 связан, напри- . мер, с дисковыми ножами 20 (условно показан один нож). Выход датчика 2 через формирователь 21 подключен к входу распределителя 9.
Устройство содержит также.блок 22 гейераторой Импульсов, каждай из которых в зависимости отвида обработки и породы рыбы настроем йа различную частоту, формирователь 23 импульса, конъюнктор 24 и датчик 25 напольного положения рабочего органа, подключенные к входам селекторов-мультиплексеров 13 и 1,4.
Устройство работает следующим образом. ..
Рыба 4, двигаясь под дей ствием . транспортирующего органа по стрел- , ке / , находит на измерительный рычаг датчика 1 длины рыбы. Последний выдает/сигнал на выходе формирова740213
теля 5, длительность которого пропорциональна длине обрабатываемой рыбы. С помощью преобразователя 6 время импульсный сигнал преобразовывается в аналоговый, который через согласующий элемент 7 подается на вход генератора 8 импульсов. Под действием сигнала с элемента 7 на выходе генератора устанавливается стабильная частота, величина кЪторой обратно пропорциональна длине обрабатываемой рыбы.
Одновременно сигнал с формирова теля 5 запускает формирователь 23 импульса. Длительность сигнала формирователя 23 выбрана равной длительности сигнала, получаемого при измерении наибольшего экз,емпляра обрабатываемой рыбы.
В результате сигнал на выходе ,конъюнктора 24 появляется только при измерении экземпляров рыб, отличных от наибольшего.
Сигнал с конъюнктора 24 обеспечивает подачу импульсов с блока 22 генераторов через селектор-мультиплексер 13 на вход вперед коммутатора 15, Шаговый двигатель 16 посредством реечной пары 18 и рычага 19 о,беспечиваёт подвод ножей 20, установленных, в начальном состоянии на обработку наибольшего экземпляра рыбы, к телу обрабатываемой рыбы.
При дальнейшем движении, рыба 4 находит на второй датчик 2, который через формирователь 21 и конъюнктор 10 з-апускает в работу счетчик 11 распределителя 9, на выходешифратора 12 последовательно появляются сигналы.
длительность сигналов и их количество выбирается, исходя из вида обработки и породы рыбы, путем программирования шифратора.
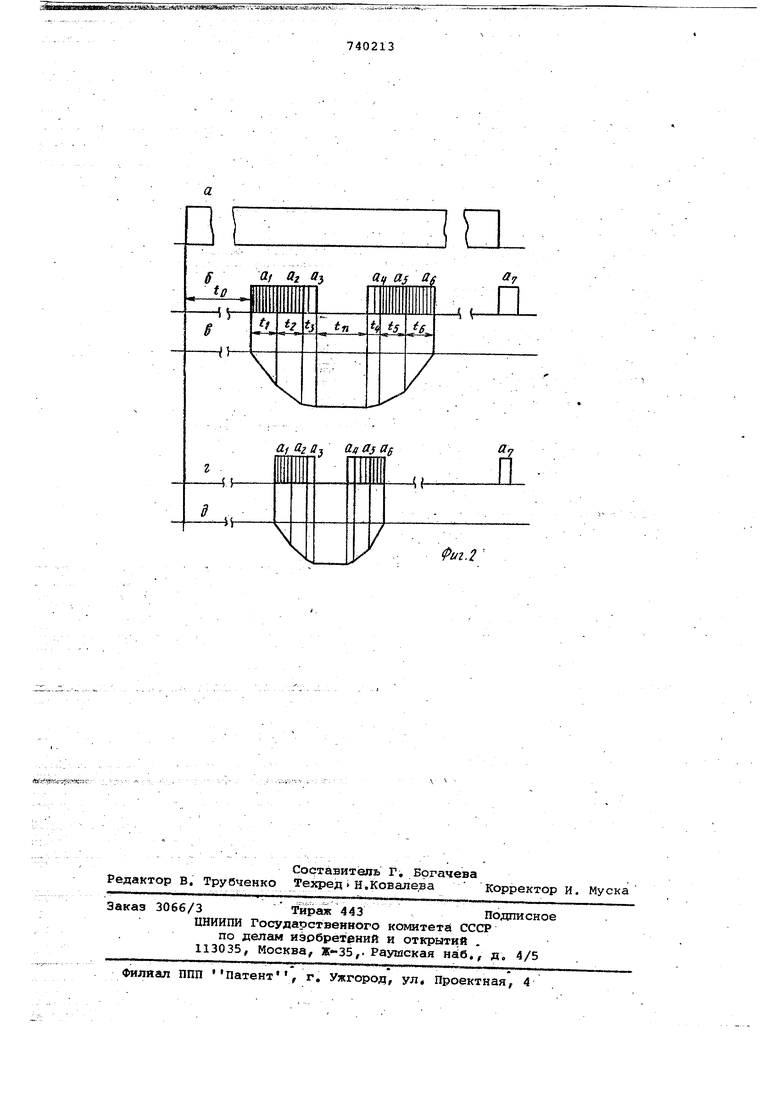
В качестве примера (фиг, 2) представлены диаграммы сигналов для случая, когда производится операция вырезания спинного плавника наибольшего и наименьшего экземпляров рыб.
Сигналом с формирователя 21 (фиг, 2,а) запускается распределит тель 9. Через время t (фиг, 2,6), соответствующее расстоянию от передней кромки до начала спинного плавника рыбы., на выходе распределителя 9 последовательно появляются сигналы а , а„ , а, длительностью ,2. время -t, , Ь„, -Ь импульсы; с блока генератора через селектор-мультиплексер 13 поступают, на вход вперед коммутатора 15, шаговый двигатель 16 обеспечивает движение ножей 20 в теле рыбы (фиг. 2,в).
Через время t.,, на входы селектрра-мультиплексера 14.подается последовательность импульсов а, , а., длительностью -t, tg , (, которая обеспечивЗет подачу импульсов на вход .назад коммутатора 15. Шаговый
двигатель 16 обеспечивает вывод НО7 жей 20 из ела рыбы (фиг. 2,в).
. Таким образом обеспечивается выполнение операции вырезания спинног 5 плавника рыбы с минимальными потерями сырья.
При обработке наименьшего экземпляра рыбы (фиг. 2,г,д) последовательность работы устройства аналогична, но благодаря увеличению частоты генератора 8 обратно пропорционально длине рыбы длительность всех сигналов сокращается (фиг,. 2,г,д) пропорционально длине рыбы, чем обеспечивается экономичная обра- ботка рыбы вне зависимости от ее размера.
Подбором количества и длительности сигналов а -а., можно обеспечить любую требуемую форму реза.
Сигналом а производится сброс лреобразователя 6 и возвращение ножей 20 в исходное состояние. В исходном состоянии замыкается датчик 25, и подача импульсов с блока 22 на вход .назад коммутатора 15 прекращается.
Благодаря использованию этих элментов упрощаются конструкция устройства и процесс программирования системы на различные виды .обработки различных пород рыб, увеличиваются функциональные возможности устройства и его надежность. Это даетвозможность использования данного устройства в различных узлах автоматических линий для разделки рыбы,
Формула изобретения
Устройство для настройки рабочих органов рыборазделочной машины, содержащее два последовательно установленных по ходу конвейера рыборазделочной машины датчика линейных размеров рыбы, распределитель импульсов с генератором и систему упгравления исполнительным механизмом, включающую вычислительный блок, .
5 отлича.ющееся тем, что, с целью расширения функциональных возможностей и улучшения качества разделки рыбы, оно дополнительно сна15жено блоком генераторов импульсов, соединенным через селекторы0мультиплексеры с входом системы упг равления исполнительным механизмом, а вход Генератора распределителя импу льсов связан с выходом второго датчика линейного размера рыбы.
5
Источники информации, принятые во внимание при экспертизе
2,Авторское свидетельство СССР
0 по заявке № 2418586/28-13,
кл,. А 22 С 25/14, 1976,
W
740213
