1
Изобретение относится к области автоматизации процессов обработки рыбы и может быть использовано в рыборазделочных машинах для автоматической настройки ее рабочих органов в зависимости от длины рыбы при расположении ее на конвейере вдоль движения.
Известно устройство для настройки рабочих органов рыборазделочной машины, содержаш,ее датчик линейного размера рыбы, реверсивный счетчик имп льсов, преобразователь пепрерывной величины во временной интервал, распределитель импульсов с генератором и систему управления исполнительным механизмом 1.
Иедостатками известного устройства являются малый выход готовой продукции при разделке рыбы из-за прямолинейного характера реза и невысокое качество разделки.
Цель изобретения - повышение выхода готовой продукции при разделке различных пород рыб и улучшение качества продукции.
Для достижения цели устройство дополнительно снабжено вторым датчиком линейного размера и нелинейным блоком, при этом входы иелииейного блока связаны с выходами обоих датчиков линейного размера рыбы и выходом вычислительного
блока, а выход последнего - со входом преобразователя непрерывной величины во временной интервал.
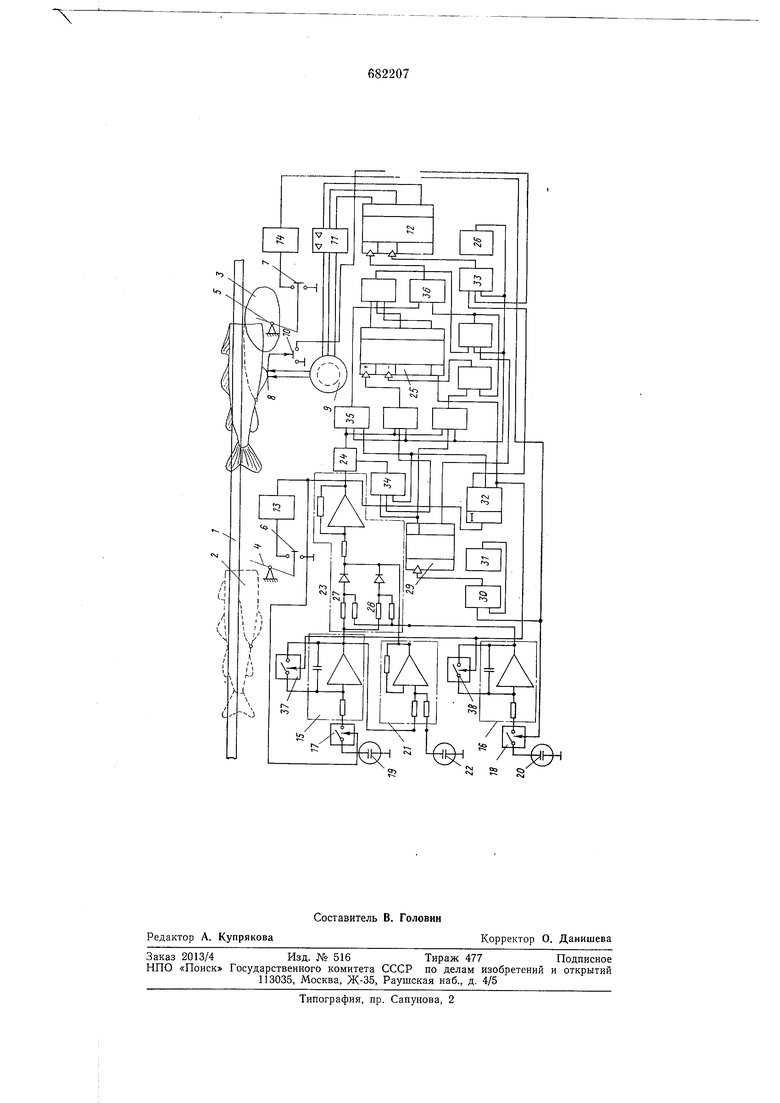
На чертеже дана блок-схема устройства для настройки рабочих органов рыборазделочной машины.
Устройство содержит два параллельно установленных в горизонтальной плоскости ленточных конвейера 1 для персмешения
рыбы 2 и два дисковых ножа 3, расположенных под углом.
По ходу движения конвейера 1 с интервалом, превышаюшим наибольшую длину обрабатываемых рыб, установлено два датчика линейного размера рыбы, содержащих каждый по одному механическому шупу (рычагу) 4 (5) и выключателю 6 (7) контактного или бесконтактного действия, с которым взаимодействует этот шуп.
Под конвейером 1 в зоне ножей 3 установлен толкатель 8, который в процессе обработки отводит туловище рыбы от ножей 3, обеспечивая оптимальную форму реза. Например, при обработке рыбы на балычок
обеспечивается криволинейный рез брюшка с выходом ножа в районе анального плавника. Толкатель 8 связан с шаговым двигателем 9 и конечным выключателем 10, который фиксирует начальное положение
толкателя 8, соответствующее максимальному экземпляру обрабатываемой рыбы. Шаговый двигатель 9 через усилитель 11 подключен к коммутатору 12. Каждый из выключателей 6 или 7 через формирователь 13 или 14 соответствеиио подключен к евосму преобразователю временного интервала в непрерывную величину. Оба этих преобразователя включают в себя по одному интегратору 15 и 16, вход каждого из которых через аналоговые ключи 17 или 18 соответственно подсоединен к источникам 19 и 20 эталонного напряжения.
Таким образом, сигнал, формируемый на выходе интегратора 15, при замкнутом выключателе 6 изменяется по линейному закону, а когда выключатель 6 возвраш,ается в исходное разомкнутое состояние,- остается на неизменном уровне. Величина этого сигнала в конце измерения пропорциональна длине измеряемой рыбы.
Сигнал, формируемый на выходе интегратора 16, по форме повторяет сигнал, формируемый на выходе интегратора 15, но сдвинут относительно него по времени.
С помощью вычислительного блока 21, один из входов которого подключен к выходу интегратора 15, а другой - к источнику 22 эталонного напряжения, величина которого пропорциональна длине максимального экземпляра рыбы, вырабатывается сигнал, пропорциональный относительной (относительно максимального экземпляра) длине обрабатываемых рыб.
Выходы интеграторов 15 и 16, а также вычислительного блока 21 подключены ко входам нелинейного блока 23, например диодного.
Назначение нелинейного блока 23 состоит в том, чтобы по входным сигналам сформировать выходной сигнал, связанный с высотой рыбы. Будучи преобразованный с помощью преобразователя 24 непрерывной величины во временной интервал, реверсивного счетчика 25, коммутатора 12, генератора 26 импульсов и шагового двигателя 9 в величину перемещения толкателя 8, он обеспечивает требуемую форму реза, например, брюшка рыбы 2. Причем сигнал, снимаемый с выхода интегратора 15, выполняя роль источника опорного напряжения, формирует форму реза в зависимости от длины обрабатываемой рыбы, до ее подхода к ножу 3; сигналом, оннмае.мым с выхода сумматора 21, задается начальное положение толкателя 8 перед приходом к нему рыбы; сигналом, снимаемым с выхода интегратора 16, формируется кривая реза в процессе взаимодействия рыбы с ножом.
Таким образом, для рыб различных размеров обеспечивается форма реза, удовлетворяющая требованиям ГОСТа (криволинейный рез брюшной полости с окончанием реза в районе анального плавника).
Задание требуемой формы реза проводится изменением величин сопротивлений резисторов 27 и 28.
Управление преобразователем 24 и реверсивным счетчиком 25 нроизводится посредством распределителя 29, вход которого через конъюнктор 30 подключен к формирователю 14 и генератору 31.
Работа устройства происходит следующим образом.
Рыба 2, транспортируемая ленточными конвейерами I, находит на рычаг 4, который замыкает контакт выключателя 6.
На выходе формирователя 13 появляется единичный сигнал, который вызывает срабатывание аналогового ключа 17 и запуск элемента 32 задержки. Ключ 17 нодключает источник 19 эталонного напряжения ко входу интегратора 15, и последний вступает в работу, изменяя выходное наиряжение по линейному закону. Через определенное время сигналом с элемента 32 задержки ко входу «Назад коммутатора 12 через конъюнктор 33 подключается генератор 26 HMn vTbCOB, и шаговый двигатель 9 возвращает толкатель 8 в исходное состояние, фиксация которого нроизводится нутем замыкания конечного выключателя 10.
После окончания нроцесса измерения контакт выключателя 6 размыкается, и интегратор 15 переходит в режим запоминания, фиксируя на своем выходе напряжение. Вычислительным блоком-21 по составляюиди.м входных напряжений определяется выходное напряжение, пропорциональное относительной длине рыбы.
При срабатывании контакта выключателя 7 напряжение на выходе интегратора 16 начинает расти на входе нелинейного блока 23. В соответствии с заранее заданной криБо: реза, преобразованной з число импульсов, которые воздействуют на шаговый двигатель 9, обеспечивается перемещение рабочего органа 8, что в конечном итоге приводит к установлению требуемой формы реза.
Например, при обработке самого мелкого экземпляра рыбы после окончания процесса ее измерения на выходе интегратора 15 и сумматора 21 устанавливаются соответственно минимальный н максимальный сигналы, что приводит к появлению максимального сигнала на выходе нелинейного блока 23.
Сигналом с элемента 32 задержки, ноступающим через дизъюнктор 34 на преобразователь 24, сигнал с нелинейного блока 23 с номощью коньюнктора 35 и генератора 26 преобразуется в пачку импульсов, которая через дизъюнктор 36 поступает на вход «Вперед коммутатора 12, и шаговый двигатель, перемещая толкатель 8 с исходного состояния, подводит его под брюшко подходящей рыбы.
При дальнейшем движении рыба 2 находит на рычаг 5, который замыкает контакт 7. На выходе формирователя 14 появляется единичный сигнал, который вызывает срабатывание аналогового ключа 18 и запуск в работу через конъюнктор 30 распределителя 29 импульсов. С помощью ключа 18 эталонное напряжение подключается к входу интегратора 16, и его выходное напряжение начинает изменяться с нулевого значения по линейному закону со скоростью, равной скорости движения конвейера.
В результате на вход нелинейного блока 23 поступают постоянные по величине сигналы с сумматора 21 и интегратора 15 и изменяющийся во времени сигнал интегратора 16. Под действием этих напряжений на выходе нелинейного блока 23 формируется сигнал, форма которого соответствует зеркальному отображению кривой реза.
Одним сигналом с распределителя 29 через дизъюнктор 34 запускается преобразователь 24, и текущее значение напряжения преобразуется в пачку импульсов, которая поступает на вход «Вычитание реверсивного счетчика 25.
Другим сигналом с распределителя 29 через дизъюнктор 34 вновь запускается в работу преобразователь 24, и новое значение напряжения преобразуется в пачку импульсов, которая поступает на вход «Сложение счетчика 25. В результате счетчик 25 зафиксирует разностное число импульсов, соответствующее текущему и предыдущему значениям выходного напряжения нелинейного блока 23.
Третьим сигналом с распределителя 29 разностное число импульсов со счетчика 25 поступает на вход «Вперед коммутатора 12. Шаговый двигатель 9 перемещает толкатель 8, который отводит от ножа 3 туловище рыбы, обеспечивая отрезание только брющной полости.
В процессе движения рыбы относительно нолса 3 цикл работы распределителя 29,
а следовательно, и всех других элементов, с ним связанных, повторяется несколько раз. Это достигается тем, что цикл работы распределителя 29 (период импульсов генератора 31) значительно меньще времени цикла обработки рыбы.
После окончания обработки рыбы сигналом с элемента 32 задержки производится сброс информации со счетчика 25 и посредством ключей 37 и 38 - с интеграторов 15 и 16 устройство приводится к исходному состоянию.
Устройство благодаря использованию нелинейного блока обеспечивает требуемую
форму реза рыбы от линейной до праволинейной, регулируемую в зависимости от породы и индивидуального размера рыбы, что увеличивает выход продукции, улучщает ее качество и товарный вид.
Формула изобретения
Устройство для настройки рабочих органов рыборазделочной мащины, содержащее датчик линейного размера рыбы, реверсивный счетчик импульсов, преобразователь непрерывной величины во временной интервал, распределитель импульсов с генератором и систему управления исполнительным механизмом, включающую вычислительный блок, отличающееся тем, что, с целью повыщения выхода готовой продукции при разделке различных пород рыб и улучщенг.я качества продукции, оно дополнительно снабжено вторым датчиком линейного размера и нелинейным блоком, при этом входы нелинейного блока связаны с выходами обоих датчиков линейного размера рыбы и выходом вычислительного блока, а выход последнего - со входом преобразователя непрерывной величины во временной интервал.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 508702, кл. А 22 С 25/14, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU721060A2 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |