1
Изобретение относится к области балансировочной техники и может использоваться для балансировки гибких роторов.
Известен способ балансировки гибких роторов с построением расчетных кривых зависимости реакций ротора от вида дисбаланса и частот вращения в широком диапазоне изменения последних, включающем критическую и закритические частоты (амплитудно-частотпых характеристик). При пробном пуске неуравновешенного ротора измеряют амплитуды и фазы реакций опор. По даппым измерений строят амплитудло-частотпые характеристики балансируемого ротора и определяют систему корректировочных масс путем сравнения результатов измерений с расчетными кривыми.
Однако для построения амплитудно-частотной характеристики балансируемого ротора требуется проводить измерения на многих частотах вращения, включая критическую и закритические, что является достаточно трудоемкой и длительной операцией. Известный способ не может применяться при большо м начальном дисбалансе, при котором переход ротора через резонанс опасен. В этом способе корректировочные массы должны повторять вид имеющегося дисбаланса, но конструкция ротора не всегда допускает такое распределение.
По предлагаемому способу систему корректировочных масс определяют по результатам измерения на двух фиксированных частотах вращения амплитуд реакций опор и сравнения их отношения с расчетными кривыми, представляющими собой зависимости отношения амплитуд реакций на данных частотах от вида нагрузки. Это позволяет вместо сложного построения по результатам измерений амплитудно-частотной характеристики вычислять отпопюпие величии реакций на двух скоростях, а также получать несколько равноценных с точки зрения балансировки вариантов систем корректировочных масс, что обеспечивает уравновешивание ротора в широком диапазоне частот и упрощает процесс балансировки.
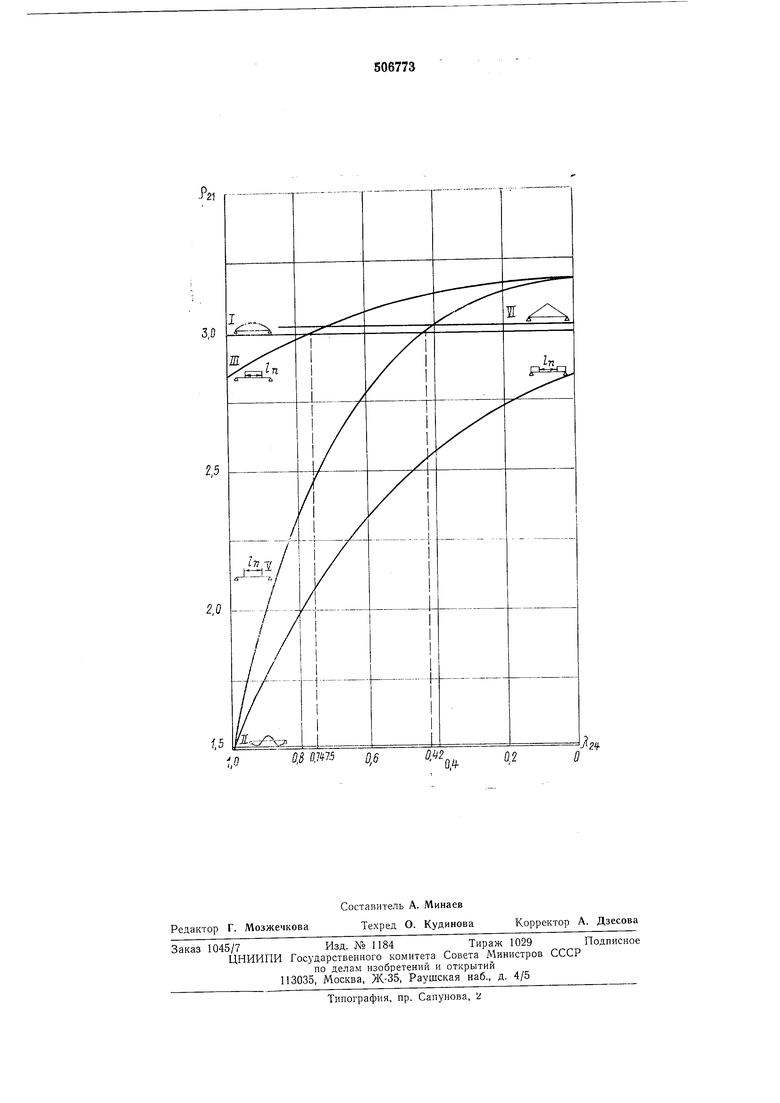
На графике ноказапы расчетные кривые, представляющие зависимость отношения амплитуд реакций (p2i) на двух фиксированных частотах Сй1/(йкр1 0,707 и а)2/(0кр1 0,866 для разных видов нагрузки в зависимости от ее относительного положения на роторе.
Предлагаемый способ балансировки заключается в следующем.
Для устранения встречающихся видов дисбаланса используются в качестве корректировочных нагрузок первоначально рассчитанные кривые, представленные на графике. Затем производят пробный пуск балансируемого ротора с измерением амплитуд и фаз реакций
0
опер на двух выбранных частотах вращения (в указанном примере coi/ft)Kpi 0,707 к
Ш2/Юкр1 0,866).
По результатам измерений вычисляют величину р21 отношения реакций на выб1ран.ных частотах. Полученную величину p2i сравнивают с эталонными кривыми. Для этого на оси ординат откладывают полученную величину Р21 и проводят через эту точку горизонтальную прямую. Абсциссы точек пересечения этой прямой с расчетными кривьгми определяют относительные положения корректировочных систем масс, где /п -длина загруженного нля свободного участков, I - длина ротора. Из найденных вариантов корректировочных масс выбирают наиболее подходящий по условиям распределения вариант нагрузки, которая будет использована при балансировке.
После этого обычными приемами определяют осевую плоскость расположения и величину выбранной системы корректировочных масс для окончательной балансировки ротора.
Формула изобретения
Способ балансировки гибких роторов, заключающийся в том, что строят расчетные кривые, измеряют при пробном пуске неуравновешенного ротора амплитуды и фазы реакций на опорах и определяют систему корректировочных масс путем сравнения результатов измерений с расчетными кривыми, отличающийся тем, что, с целью обеспечения уравновешенности в широком диапазоне частот вращения и упрощения процесса балансировки, систему корректировочных масс определяют по результатам измерения на двух фиксированных частотах вращения амплитуд реакций опор и сравнения их отношения с расчетными кривыми, представляющими собой зависимости отношения амплитуд реакций на данных частотах от вида нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| СПОСОБ МОДУЛЬНОЙ БАЛАНСИРОВКИ РОТОРА ЛОПАТОЧНОЙ МАШИНЫ | 2008 |
|
RU2443868C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ | 1992 |
|
RU2039958C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| Способ динамической балансировки ротора в двух плоскостях коррекции | 2022 |
|
RU2790897C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |