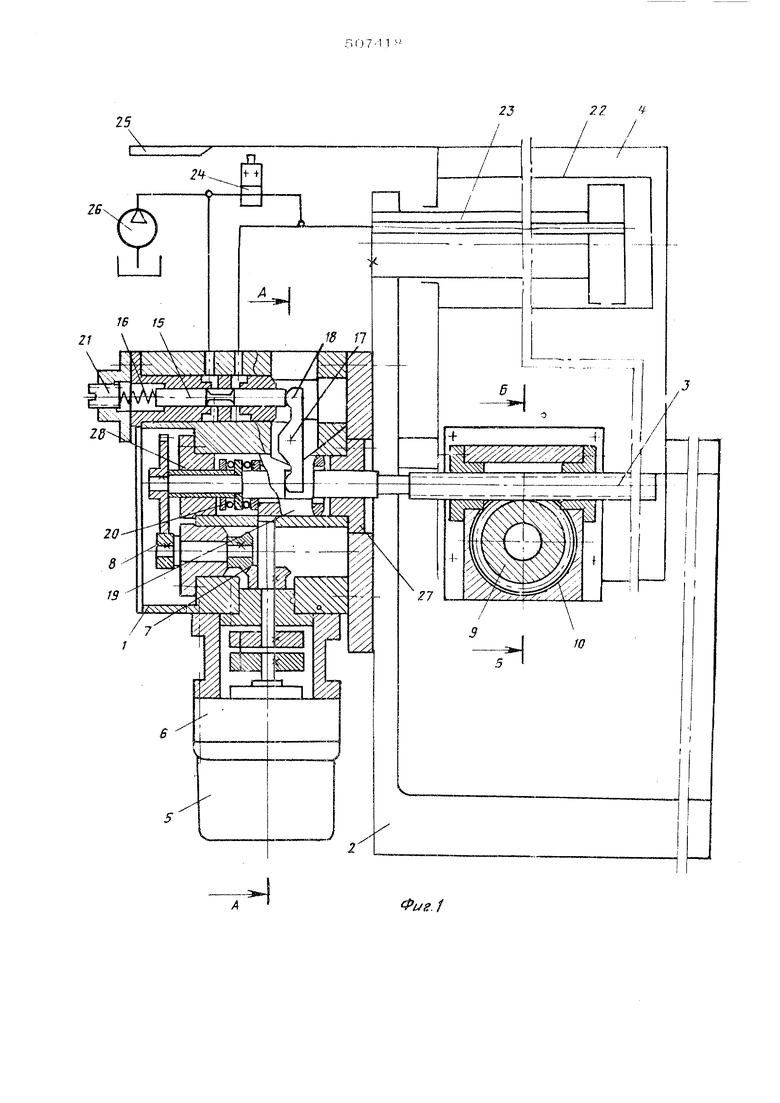
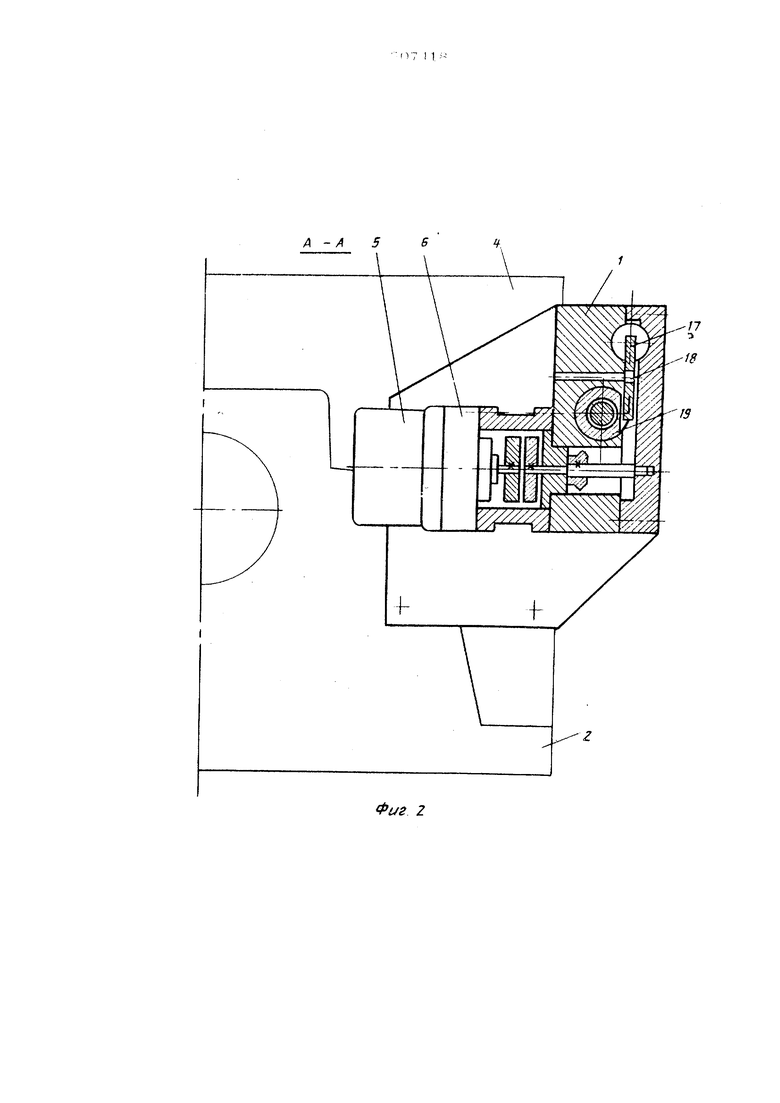
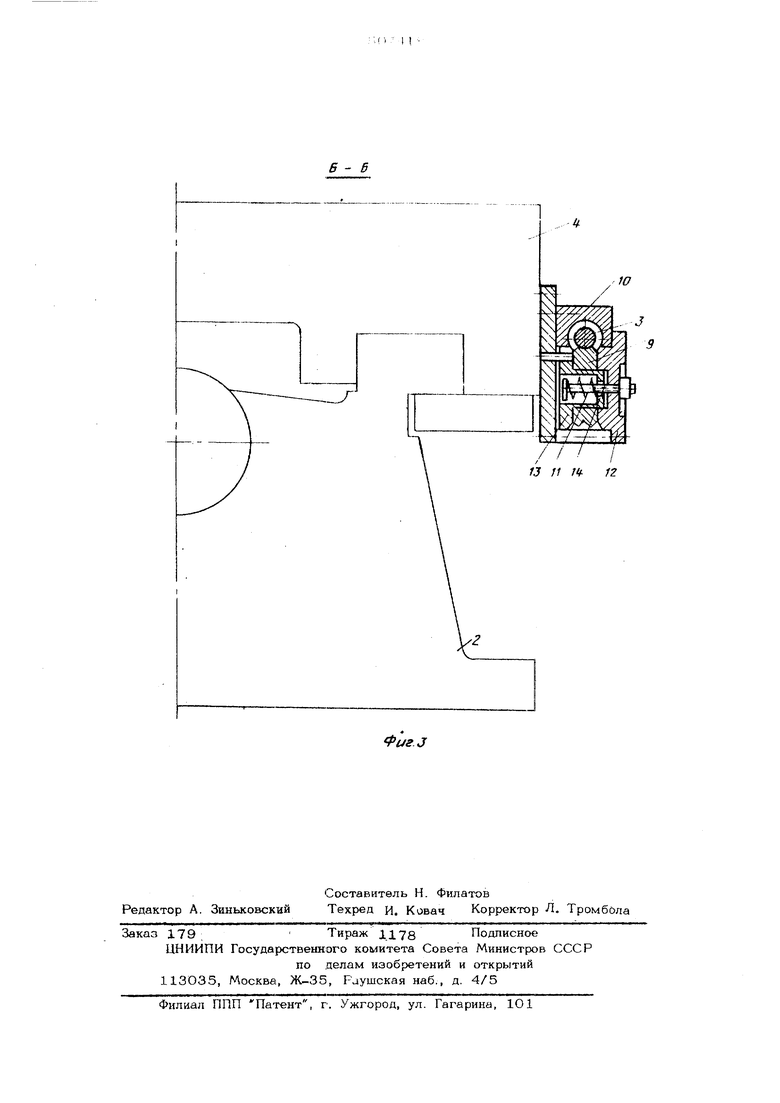
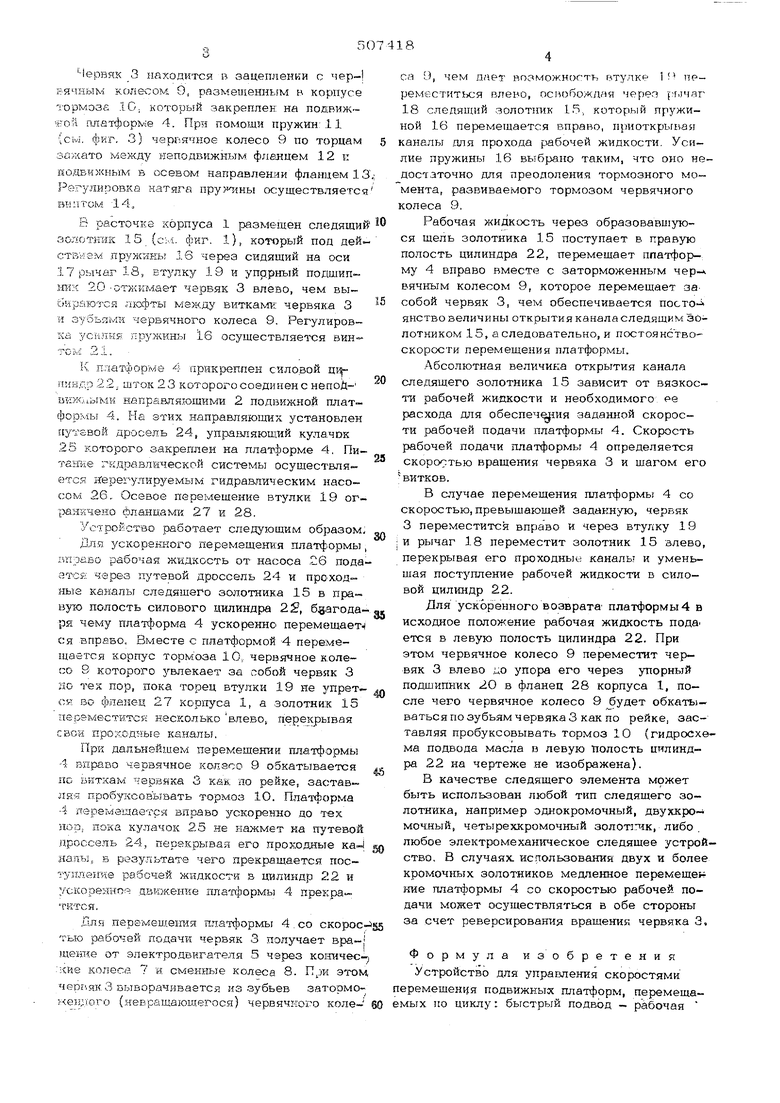
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКО РЮСТЯМИ ПЕРЕМЕЩЕНИЯ ПОДВИЖПЫХ ПЛАТФОРМ Червяк 3 находится в зацеплении с вячныы колеч7ом О, pasMeiueHHbfM в корпусе тормозе .1C; который закреплен на подвиж нон гшатфор ге 4. При помощи пружин: 11 {civi. фиг, 3) чергшчное колесо 9 по торцам зажато неподвижным фланцем 12 и нодБижным в осевом направлении фланцем 13 Регулировка натяга осуществляется винтом . Е расточке корпуса 1 размещен следящи зо-лоткик 15 (c;vi. фкг. 1), который ПОД дей ствием гфужины 16 через сидящий на оси 17 рычаг 18, втулку 19 и упорный подшйп ж-;:-х 20 -отжимает чарвяк 3 влево, чем выСйраются люфты между виткамт : червяка 3 и зубьзмн червячного колеса 9. Регулировка зсилия пружины 16 осуществляется вин- .,г V 1 }(. г;латфор):«е 4 прикреппен силовой щ пнкдр 22: шток 2 3 которого соединен с непойвкждыми направляющими 2 подвижной платформы 4. На этих направляющих установлен путевой дросель 24, управляющий кулачок 25 которого закреплен на платформе 4, Пита:тйе гидравлической системы осуществляется ii;eрегулируемым гидравлическим насосом 26, Осевое перемещение втулки 19 ог{ анкченО фланцами 27 и 28. Устройство работает следующим образом Лля ускоренного перемещения платформы дправо рабочая жидкость от насоса 6 пода атся через путевой дроссель 24 и про-ходные каналы следящего золотника 15 в правую полость силового цилиндра 22, бдагода ря чему платформа 4 ускоренно перемощает ся вправо. Вместе с платформой 4 перемещается корпус тормоза 1О. червячное колесо 9 которого увлекает за собой червяк 3 но тех пор, пока торец втулки 19 не упрет- ся во 27 корпуса 1, а золотник 15 переместите к насх- олько влево, пер екрывая свои проходные каналы. Гфи дальнейшем перемещении платформы 4 вправо червячное колесо 9 обкатывается по вктхам червяка 3 как по рейке, заставляя пробуксовывать тормоз Ю. Платформа 4- перемещается вправо ускоренно до тех пор, пока кулачок 25 не нажмет ка путевой дроссель 24, перекрывая его проходные KaJ папы, Б результате чего прекращается нос уллеггае рабочей жидкости в цилиндр 22 и ;/скоренно -ч движение платформы 4 npesipa- Для перемеагехгля платформы 4. со скорос тью рабочей додачи червяк 3 получает вра- щеш1:е от электродвигателя 5 через ко)Я1чес кие колеса 7 и сменные колеса 8. При это черпякЗ выворачивается из зубьев затормо кендюго (яеЕращаюшегося) червячного колеа 9, чем дает возможность гзтулке i прреместит1зся влево, осиобождая череп рглчаг 18 следящий золотник 1.5,, который пружиой 16 перемещается вправо, приоткрывая аналы для прохода рабочей жидкости. Усиие пружины 16 выбрано таким, что оно недостаточно для преодоления тормозного момента, развиваемого тормозом червячного олеса 9, Рабочая жидкость через образовавшуюся щель золотника 15 поступает в правую по.лость цилиндра 22, перемещает ппатфор)- му 4 вправо вместе с заторможенным чер- вячным колесом 9, которое перемещает за собой червяк 3, чем обеспечивается nocTO-J янство величины открытия канала следящим золотником 15, а следовательно, и постоянствоскорости перемещения платформы. Абсолютная величина открытия канала следящего золотника 15 зависит от вязкости рабочей жидкости и необходимого ее расхода для обеспечо;рия заданной скорости рабочей подачи платформы 4. Скорость рабочей подачи платформы 4 определяется скоростью вращения червяка 3 и щагом его витков. В случае перемещения платформы 4 со скоростью, превышающей заданную, червяк 3 переместится вправо и через втулку 19 и рычаг 18 переместит золотник 15 влево, перекрывая его проходные каналы и уменьщая поступление рабочей жидкости в силовой цилиндр 22. Для ускоренного возврата платформы 4 в исходное положение рабочая жидкость пода ется в левую полость цилиндра 22. При этом червячное колесо 9 переместит червяк 3 влево ио упора его через упорный подшипник 2О в фланец 28 корпуса 1. после чего червячное колесо 9 будет обкатъ - ваться по зубьям червяка 3 как по рейке, заставляя пробуксовывать тормоз 10 (гидросхема подвода масла в левую полость цилиндра 22 на чертеже не изображена). В качестве следящего элемента мржет быть использован любой тип следящего золотника, например эднокромочный, двухкромочный, четырехкромочный золотзгик, либо . любое электромеханическое следящее устройство. В случаях использования двух и более кромочных золотников медленное перемеще ние платформы 4 со скоростью рабочей подачи может осуществляться в обе стороны за счет реверсирования вращения червяка 3, Формула изобретения Устройство для управления скоростями еремещения подвижных платформ, перемещамых по циклу: быстрый подвод - рабочая
подача - быстрый отвод, гидродвигат ль которого соединен с источником питания через следящий золотник, управляемый плавающим винтом, взаимодействующим с червячным колесом, связанным с фрикционным тормозом, закрепленным на подвижной платформе, отличающееся тем, что, сцелькз rio-, лучения максимальных скоростей установоч-J ных перемещений путем использования всего.
дебита нгточпикл питлнпя, гндромвиу.-л-рл. снабжен дополнительной магиС1ралью, .и гэы-вающей его с источниким питлиия через угтановленный путевой дроссель, в зянмопепп-вующнй с кулачком, закрепленным на подвижной платформе, а фрикционный тормоз снабжен пружиной, усилие которой выбирают из -условия пробуксовывания его при установочных перемещениях платформы. ft. Фиг 2 A /1 13 }1 JifФuгJi 12
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубошлифовальный станок | 1973 |
|
SU454100A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Механизм управления скоростью перемещения стола зубообрабатывающего станка | 1978 |
|
SU743801A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| СПОСОБ ГИДРОУСИЛЕНИЯ ДИСТАНЦИОННОГО РУЛЕВОГО УПРАВЛЕНИЯ И СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420421C2 |
| Гидравлическое нажимное устройство прокатного стана | 1961 |
|
SU148776A1 |
| Гидравлический усилитель рулевого управления транспортного средства | 1974 |
|
SU524723A1 |
| Устройство для затылования | 1984 |
|
SU1199458A2 |
| Следящий гидропривод | 1982 |
|
SU1090932A1 |
| Электрогидравлическая рулевая машина | 1986 |
|
SU1449459A1 |