1
Изобретение относится к обпасти станкостроения и предназначено для использования в зубообрабатывающих станках для управления скоростью перемещения стопа, совершающего возвратно-поступательное движение в соответствии с заданным шпс- пом.
Известны механизмы управления скоростью перемещения стола зубообрабатьшакщего станка, которые содержат установленные на стан1ше силовой гидроцилиндр перемещения стопа, элемент управления отводом стола, следящий золотник, установленный на штоке силового цилиндра, копир врезания и устройства торможения: силового гидроцилиндра С1 и С .
При этом силовой гидроцилиндр содержит известные буферные устройства, в которых функции устройства торможения выполняют дроссели с обратными клапанами, работающие в момент, когда поршень цилиндра перекрывает основную магистраль. В это время торможение осуществляется за счет пропускания масла через дроссель.
Однако при работе зубообрабатывающих станков практически отсутствует торможение стола при отводе его на деление, так как стол, несмотря на задаваемую механизмом управления величину перемещения, сначала проскакивает по инерцшг на величину, больщую задаваемой, а затем возвращается в нужное положение, при этом наблюдаются сильные удары. Поскольку величина отвода стола на деление раз10лична, в зависимости от модуля обрабатьваемых зубчатых колес, необходимо иметь дополнительно регулировочные устройства, например, при встройке тормозных элементов - регулируемые упоры, что ус15ложнило бы обслуживание станков. Применение в механизме управления переставных тормозных кулаков неудобно в эксплуат ацин,
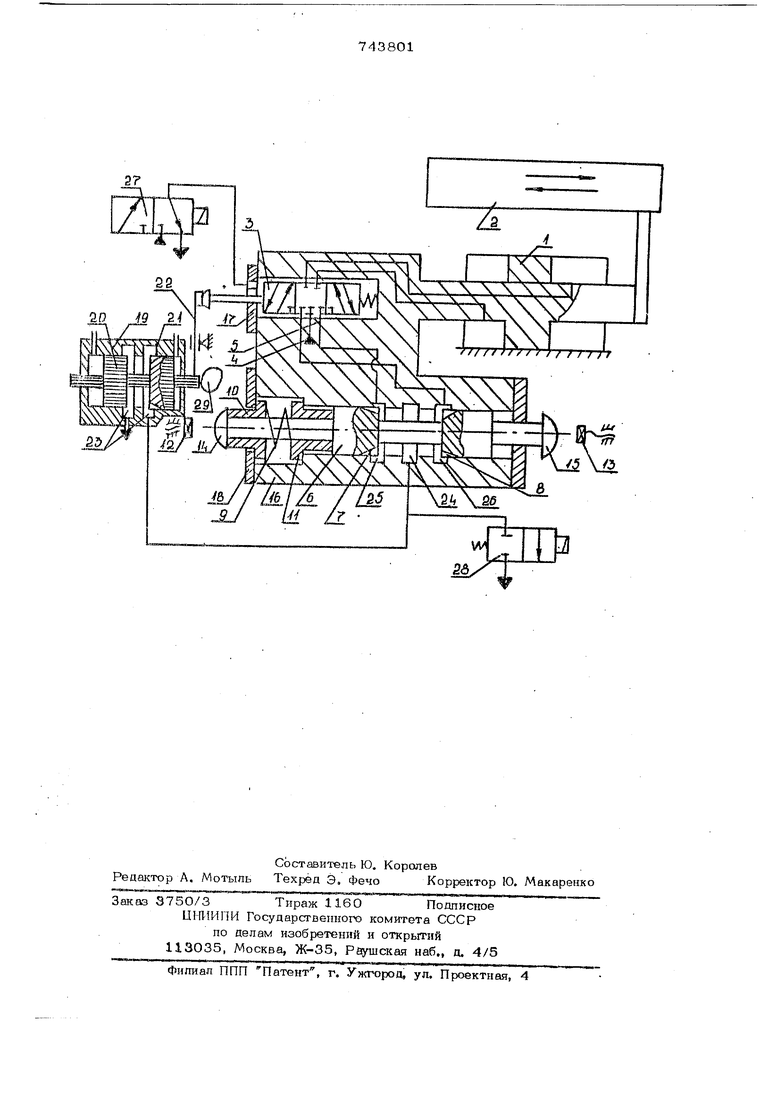
Недостатком буферных устройств явля20ется их сложность изготовления и неудобство в обслуживании, так как они содержат набор дросселей и обратных клапанов, раэмещенных в крышкпх гидропилиндра, которые в зубообрабйтывающих стайках находятся в труднодоступных для нападки и регулировки местах. Кроме того, при больших двиясущихся массах, как это имеет место в зубообрабатьюающих станках, указанные буферные устройства мало эффектршны в целом, так как не обеспечи-вают плавное торможение стола нри подводе к конечным его положениям. Таким образом, имеющийся механизм управления скоростью перемещения стола в зубообрабатывающих станках не обеспечивает плавное торможение при похшоде его к конечным положениям и отводе на деление и тем самым не устраняет удары и динамические перегрузки, которые существев но влияют на динамическую устойчивость г гидрокинематической цепи статса. Перешоленные факторы приводят к тому, что значительно снижается точность обработки конических колес, отсутствие надлежащего торможения при отводе стола на деление также способствует возникновению толчков ударов и как следствие - деформации элементов , ухудщающие его точностные п . -. хара5стеристшси. В результате, задача управления скоростью перемещения стола зубообрабатывающих станков, в соответствии с заданным .циклом, решается не .наилучшим образом. Цель изобретения повышение точности позиционирования стола путем безударной остановки его в конечных и любой задаваемой промежуточной позициях. Указанная цель достигается тем, что элемент управления отводом выполнен в виде золотника управления, а устройство торможения стола - в виде дополнительно-. го золотника, включенного последовательно между следящим золотником и золотником управления, и закрепленного на штоке силового гидроцилиндра, при этом дополнительный , еолотншс взаимодействует с упорами, установленными на станине, а золотник управления выполнен со средней Kaivje рой, связанной со сливом дополнительного золотника. На чертеже схематически изображен меха1шзм управления скоростью перемещения стола. Механизм содержит сяловор гидроциликяр 1 перемещения стола 2, след1пций золотник 3 с разделенными сливными ма гистралями 4 и 5, дополнительный зопот ник 6, рабочие элементы которого обеспе чивают необходимый х актер демпфирове ния стола в конечных положениях при его перемещении и представляют пазы 7 и 8, выполненные на кромках поясков перпе икулярно торцовым поверхтгостям послелних. Среднее положение аопопнитепьиого олотника 6 обеспечивается пружиной 9 втулками 10,11. Воздействие на дополнительный золотник И установка его в крЬйнее положение осуществляется регулируемыми упорами 12, 13 через пятки 14, 15 при движении стола. Дополнительгный и следящий золотники размещены в корпусе 16, который является составной частью штока силового гидроцилиндра 1. К корпусу 16 крепятся крыщки 17, 18. В корпусе 19 размещен золотник 20 управления, на котором выполнены канавки 21 и который взаимодействует с рычагом 22. Через рыЧаг 22 золотник 20 управления обеспечивает перемещение сястемы следяпций золотник-гидроципиндр в зону деления. Внутри корпуса 19, сделаны две кольцевые расточки, образующие среднюю камеру 23 в золотнике 2О управления. В корпусе 16 под дополнительный золотник 6 выполнены три кольцев ые расточки, средняя из которых 24 соединена со средней камерой 23 золотника 2О управления, а дае крайних 25 TI 26 - со сливными магистралями 4 и 5 следящего золотника 3. Для, обеспечешгя быстрого перемещения стола 2 в зону загрузки и обратно предназншены раа1ределители 27 и 28. Перемещение стола по заданному закону при обработке зубчатых колес методом врезания обеспечивает кулачок 29. Механизм работает следующим образом. Перемещение стола 2 осуществляется силовым гидроцплиндром 1 через золотник 3. Скорость перемещения стола при работе в режиме врезание задается кулачком 29 через рычаг 22. Золотник 20 упршпения поджимается к ку лачку 29, стол при этом движется влево. Слив из силового гидроцилиндра 1 осу- щесгвпяется в бак через следящий зояот ник 3, магистраль 5, расточки 25, 24 в корпусе 16 и среднюю камеру 23 в корпусе 19. При отводе стола в зову деления золотник 20 управления медленно занимает крайнее левое положение. Мгновен нал перестановка золотника управления нскточена тем, что ход следящего золотника ограничен. При перемещенип золотника управления а левое крайнее попожешге рычег 22, отрываясь от кулачка 29, перемещает следящий зопотник 3 вправо, стол TOJKS движется вправо, а слив из сливного гидроиипиндра осуществляется че реэ магистраль 4, расточки 26, 24 и дал при подхода золотника 20 управления в ле вое гюложение, что соответствует заданно величине отвода стола на деление, дросселируется канавкой 21, перекрывающей среднюю камеру 23 золотника 20 управле ния. В результате стоп тормозится. При различной задаваемой величине отвода стола на деление меняется величина перемещения периферийной части рычага.22, контактирующей со следящим золотником 3 за счет смещения оси качания рычага. Ход золотника.управления всегда постоянный При подводе стола из зоны деления в зону резания золотник управления быстро перемещается вправо до контакта с купачком, устанавливает рычаг и перемещаемую им шстему слепящий золотник-гидроцилиндр в пол.ожение, соответствующее началу резания. По окончании обработки последнего зуба стол перемещается в зону деления и осганавпивается. Если включить распределитель 27 (при этом давление через крыщку 17 поступает в полость под следящий золотник), то он быстро перемещается вправо в зону Загрузки. Одновременно с распределителем 27 включается распределитель 28, обеспечивающий свободный спив и быструю сжорость перемещения стола, несмотря на часггично перекрытый слив из системы через золотник 20 управления. При подходе стопа в зону загрузки упор 13 воздействует на дополнительный золотник 6, кртбрый, преодолевая усилие пружины 9 через втулку 11 перемещается влево. Паз 8 постепенно перекрьшает слив из магистрали 4, скорость стопа замедляется. Из загрузки стол всегда приходит в зо,ну деления, золотник 2О управления при этом находится в крайнем левом положении. Для возврата стола из зоны загруэки в зону деления выключается растфед&лвтель 27, полость под следящим золотником соединяется со спивом, следящий аолотнис под действие1М пружины занимает Левое положение, при котором стол пе ремещается влево. Спив из силового гид-, рошшинфа при этом проходит через магистраль 5, расточки 25, 24 и распределитель 28. Дополнительный золотник 6 освобождается от воздейс-гоия упора 13 и становится в среднее положение. Распределитель 28 остается включенным до тех пор, пока стол не придет в зону деления. Следукнцее включение распределителя 28 возмохи. но лишь при включении распределителя 27. Работа механизма при нарезании с обкаггкой аналогична выше описанной, разнипа заключается лишь в том,, что перемещение, стола из зоны деления в зону резания.ограничивается не положением рычага, а жестким упором. В этом случае стол п&ред приходом на упор тормозится за счет воздействия упора 12 на дополнительный золотник 6. При этом перекрьюается слив магистрали 5. Формула изобретения Механизм управления скоростью перемещения стола зубообрабатывающего craibка, содержащий уст.ановленные на станине силовой гидропилиндр перемещения стола, элемент управления отводом стола, следящий .золотник, размещенный на щтоке силового гидроцилиндра и устройство торможения стола, о т л и 4 а.ю щ и и с я тем, что, с целью повыщения точности позиционирования путем безударной остано&ки стола в конечных ;и любой промежуточных позициях, элемент управления отводом выполнен в виде золотника управления, а устройство торможения стола - в виде дополнительного золотника, включенного последовательно между следящим золотником и золотником управления, и закрепленного на штоке силового гидроцилиндра, при атом дополнительный золотник взаимодействует с упорами, установленными на станине, а золотник управления выполнен со средней камерой, связанной со сливом дополнительного золотника. Источники информации, принятые во внимание при экспертизе 1. %борезный полуавтомат од. 5С28ОП. Инструкция по эксплуате ии. 2. Брон Л. С. и др. Гидравлический ривод агрегатных станков и автоматичеК.ИХ линий. М., Машиностроение, 1974, . 232. j&j/ ША / Ш ш. /L 

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема зубообрабатывающего станка | 1980 |
|
SU931993A2 |
| Гидросистема зубообрабатывающегоСТАНКА | 1978 |
|
SU802660A1 |
| Гидропривод подачи стола зуборезного станка | 1977 |
|
SU679344A1 |
| Кинематическая цепь обката зубообрабатывающего станка | 1978 |
|
SU770689A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| Зубообрабатывающий станок | 1980 |
|
SU910377A1 |
| Гидравлический привод шлифовального станка | 1980 |
|
SU895615A1 |
| Зубообрабатывающий станок | 1978 |
|
SU749584A1 |
| Система управления следящим гидроприводом | 1978 |
|
SU749637A1 |