:в4) СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ ЭЛЕКТРОПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1975 |
|
SU546080A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1996 |
|
RU2109397C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Асинхронный частотно-регулируемый электропривод | 1981 |
|
SU957403A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотноуправляемый асинхронный электропривод | 1983 |
|
SU1129711A2 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
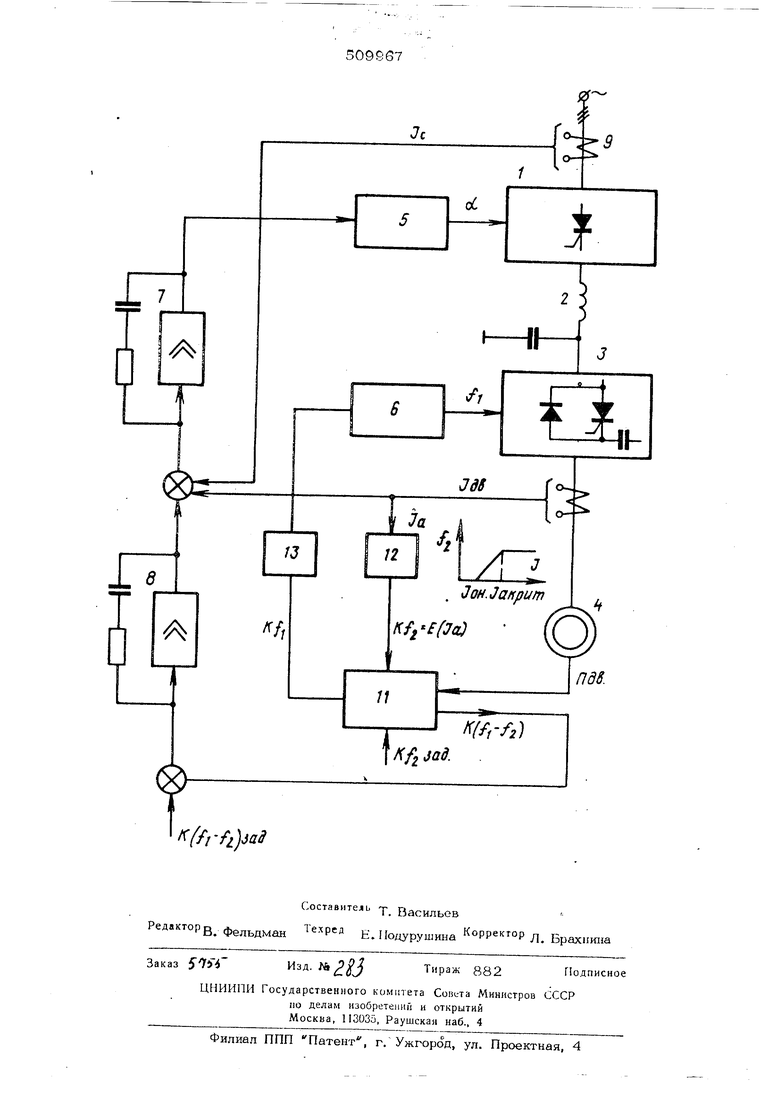
Предлагаемый способ относится к авто- матизирогзанным злектроприводам с примене нием тиристорных преобразователей частоты и может использоваться для реализации наи лее рациональных режимов частотно-регулируемых :Электроприводов« Известный способ управления частотного электропривода реализует режим постоянства потока двигателя. Согласно этому способу заданная величина момента двигателя преобразуется в заданные значения тока и f. После частоты тока ротора , сложения сигнала частоты тока pOTOiia и сигнала, пропорционального скорости врашения двигателя, образуется заданное значение частоты статора f. Далее с помощьюфункциональных преобразователей сигналы З f npeo6paiзуют в задающий сигнал, пропорциональный намагничивающему току -двигателя 3 . который поддерживается постоянным. Постоянство .этого сигнала означает по стоянство магнитного потока двигателя. Недостатки такого способа управления заключаются в-значительном числе преобразований сигналов, что приводит к увеличению погрещности выходного сигнала; в невозможности обеспечения точной стабилизации потока двигателя в переходных режимах, что обусловлено косвенными методами определения потока двигателя; в невозможности получения минимальных потерь в двигателе при любом характере нагрузки, поскольку такой режим требует регулировки потока в зависимости от момента нагрузки; в сложности технической эеализации способа, связанной с необходимостью разработки функциональных преобразователей с высокой точностью стабилизации параметров и линейностью характеристик. По предлагаемому способу с целью обеспечения режима постоя етва абсолютного скольжения для любого значения частоты и, нагрузки в интервале от холостого хода по номинальной и режима постоянства потока при нагрузках выше номинальной на вход системы регулирования поступают спгкап,. заданной и действительной скорости, л ioi;же сигналы токов на входе и выхоле преоб разователя, осуществляется суммирование импульсром виде частоты вращения ротора двигателя, заданной номинальной частоты тока ротора и частоты дополнительного функционального преобразователя, выходной сигнал которого изменяется от нуля до зна чения К( - foil) при изменении 2 Крит ,, ДО , причем тока нагрузки от Н Крит суммарная частота подается на пересчетную схему и определяет в конечном счете выходную частоту преобразователя. Кроме того, с целью упрощения суммирОЕ«ние указанных выше частот осуществляют путе импульсного сложения сигналов двух независимых механических систем специального датчика с магнито-электрическим сумматором импульсов, причем сигнал одной систе мы определяется скоростью вращения приводного двигателя, а сигнал второй систем определяется в зависимости от заданной частоты тока ротора и сигнала функционал ного преобразователя. Устройство, с помощью которого может быть реализован данный способ, представлено на чертеже. Устройство состоит из преобразователя частоты на основе управляемого тиристор- ного выпрямителя 1, сглаживающего LC фильтра 2 и независимого тиристорного ин вертора 3, к выходу которого подключен приводной асинхронный двигатель 4 с короткозамкнутым ротором. Управление тиристорами выпрямителя и инвертора упомянутого преобразователя частоты осуществля ется соответственно регуляторами напряже ния 5 и частоты 6. К входу регулятора напряжения 5 подключены суммирующие i операционные усилители 7 и 8, на входы которых подаются сигналы с датчиков тока 9 и 10, помещенных на входе и выходе преобразователя частоты и с выхода специ ного датчика 11, установленного на валу приводного электродвигателя. На входы датчика скорости подаются сигналы с выхода асинхронного двигателя; сигнал, пропорциональный его скорости, сигнал, пропорци нальный частоте тока poтopa и сигнал с датчика тока 10 через функциональный преобразователь 12. Выход датчика скорости 11 подклкзчен через пересчетную схему 13 ко входу регулятора частоты, Устройство работает следующим образом Управляющими сихналами для электропривода являются заданная частота скольжения К f , вводимая в контур регулиро2задвания выходной частоты преобразователя, н заданная скорость вращения двигателя - /.). вводимой в контур ре 1г зац гулирования выходного напряжения. В исходном состоянии начальная выходая частота инвертора 3 оттределяется задашюй частотой скольжения . Сигнлл заДания по скорости через усилит яи 7 и 8 воздействует на тиристорный вьтря -п ГРЛЬ 1 и определяет в конечном счете рыхоаное напряжение преобразователя. Ограничение вь ходного и входного токп преобразователя на заданном уровно обеспечивается введением сигналов датчиков тока 9 и 10 на вход усилителя 7, при этом сигнал активной составляющей тока двигателя JQ поступает на функциональный преобразователь 12, обеспечивающий . корректировку частоты рсэтора в зависимости от нагрузки. При значениях тока выходной сигнал функционального преобразователя 12 отсутствует. При изменении тока в пределах JQU 3„ 1выход а Крит. ной сигнал блока 12 изменяется соответственно от О до К{ fo- fо ) 2крит, 2н Таким образом, начальная частота на выходе инвертора может изменяться в аавигсимости от нагрузки в пределах от f,, f 2 Крит. При разгоне двигателя 4 выходная частота датчика скорости К( ) « суммируется в -импульсном виде с заданной частотой скольжения К / „и частотой 2 2зад. функционального преобразователя, и результирующая частота К f поступает на пере счетную схему 13, Выбор коэффициента К определ51ется из условия получения на выходе пересчетной схемы частоты, равной 2 m f , где пг - число фаз на выходе инвертора. При такой структуре выходная частота тиристорного преобразователя устанавливается без использо. ,зния задающего генератора тактовых импульсов. Поскольку частота скольлсения в любых режимах работы не может превысить значений , двигатель всегда находится на устойчивой ветви механической характеристики. При увеличении скорости до заданного значения входной сигнал усилителя 8 уменьщается до такой величины, которая определяет поддержание выходного напряжения тиристорно- преобразователя с .-заданным скольжением. При неизменном задании скорости К( / - Г)стабилизация последней при изменении нагрузки осушесгышется с помс1лью регулятора напряжения по анало гии с приводом исстоянного тока. Таким образом, структурная схема частотного электропривода с автоматической уставовкой частоты может быть реааизована с по Mouibto типового регулятора привода посто янного тока. Формула изобретения Способ управления частотным электроприводом, заключающийся в том, что управление преобразователем осуществляют через регулятор напряжения сигналом обратной связи по скорости и по току на входе или выходе преобразователя, а также через регулятор частоты сигналом час ты тока ротора и частоты вращения ротора двигателя, отличающийся тем, что, с нелью .атн-1ес1-;сиа oftt.-cпечения режима посгойнсгяа ii6co;nonioro скольжения для ;побого ан чвния U-iC 1Ч)чь; при изменениях нагрузки от холостог-о хода до номинальной и режима постоянст.;;, ш-- тока при нагрузках, болылих HOMUjui.itjiion, упомянутые сигналы, пропорщюнальные за данно§ частоте тока ротора и частоте ьращения ротора, суммируют в импул: :л(ом ьнде во всех режимах, а при превь илении током двигателя номинального значения в сумматор вводят дополнителы- ый сигнал частоты с выхода функционального преобразователя, выходной сигнал которого изеняются до нуля до К( / 2 piJT 2н изменении тока нагрузки от номинального до критического, причем упомянутой сум:. частотой управляют через перёсчегную схему и регулятор частоты преобразователя.
Jc
.9
IIh
Q.
/
