1
Предлагаемое устройство для управления Наведением телескопа относится к области астроприборостроения и может быть использовано в системах управления телескопами на экваториальной монтировке.
Известно устройство управления, содержащее приборные приводы звездного времени, угла прямого восхождения, ввода угловых поправок и угловой следящий привод 1.
Известно также устройство управления, содержащее преобразователь напряжения в частоту, избирательный усилитель, подключенный к фазочувствительному выпрямителю, сумматор, двигатель грубой настройки и синхронный двигатель, кинематически связанные через дифференциал 2.
Из известных устройств управления наведением телескопа наиболее близким к изобретению по технической сущности является устройство 3, содержащее блок анализа координат, логический блок, первый и второй концевые выключатели, первый и второй каналы управления, каждый из которых состоит из привода, подключенного через редуктор к преобразователю угол - код, выход которого соединен с первым входом сумматора и первым входом блока анализа направления вращения, второй вход последнего подключен к первому выходу сумматора и первому входу преобразователя код - аналог, выход которого связан
с входом привода. Первый вход блока анализа координат соединен с первым концевым выключателем, второй вход - с выходом преобразователя угол - код первого канала управления, третий вход - с первым входом устройства управления и с вторым входом сумматора первого капала управления, четвертый вход - с третьим входом устройства управления. Входы логического блока соответственно соединены с вторым и третьим входами устройства управления и выходами блока анализа координат, а выход - с вторым входом сумматора второго канала управления, выходы первого и второго каналов управления - с соответствующими исполнительными органами телескопа.
В этом устройстве управление наведением телескопа ведется следящими приводами по сигналам рассогласования между заданными координатами объекта наведения и фактическим положением телескопа. Перемещение телескопа по зенитному расстоянию вблизи горизонта ограничено горизонтальным выключателем, установленным на телескопе.
Перечисленные известные устройства имеют следующие недостатки. Надежность работы их низка из-за большой вероятности аварийной ситуации, вызванной неисправностью горизонтального концевого выключателя. Для телескопа на экваториальной монтировке возможны ситуации раооты в зоне олиз горизонта, когда при наведении телескопа на исследуемый объект за счет движения по одной координате телескоп движется вверх по отношению к горизонту, а за счет движения по второй координате - вниз, причем, если скорость движения по последней больше, то труба телескопа наезжает на горизоптальиый коицевой выключатель и движение по этой координате прекращается, пока труба ие съедет с горизонтального концевого выключателя. Таким образом, в известном устройстве наведения по второй координате при больших рассогласованиях возникает крайне нежелательный для приводов повторно-кратковременный режим включения и выключения приводов с максимальио возможными управляюпгими сигналами. Такой режим снижает надежность устройства. Кроме того, в таком режиме работы горизонтальный выключатель длительное время осуществляет уиравлеиие телесконом, тем самым вероятность возникиовения аварийной ситуации увеличивается, причем этот режн.м затрудняет работу оиератора.
Цель изобретения - повышение надежности и качества регулироваиия устройства для управлеиия наведением телескопа.
Это достигается тем, что в устройстве установлены вычислительный блок, два блока сравнения и два элемента И-ИЛИ, в каждом канале управления первый вход блока сравиения соединен с вторым выходом сумматора, входы элемента И-ИЛИ - соответственно с входами и выходами блока -сравнения, а выход- с вторым входом преобразователя код- аналог, входы вычислительного блока подключены к преобразователям угол-код соответствующих каналов управлеиия, а выход - к вторым входам блоков сравнения соответствующих каналов управления, второй концевой выключатель соедииен с соответствующими входами элементов И-ИЛИ каждого канала управления.
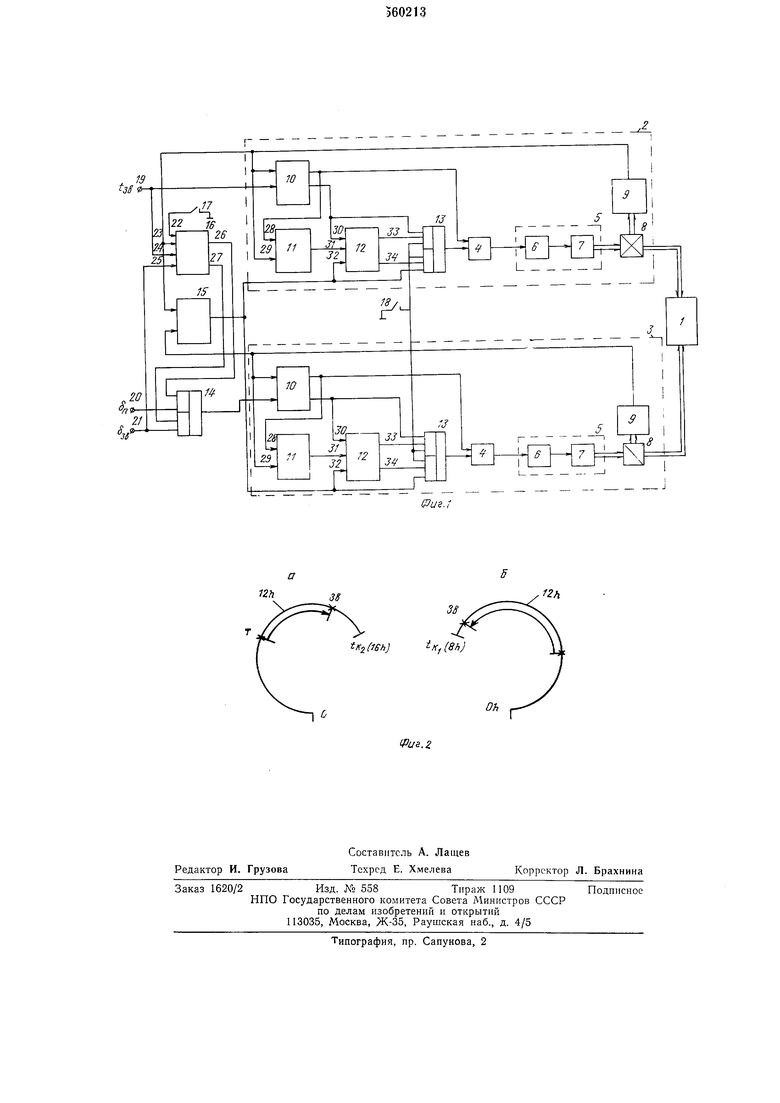
На фиг. 1 показана схема устройства для управления наведением телескопа; на фиг. 2,а,б - возможные случаи наведения телескоиа на звезду.
Устройство для управления наведением телескопа включает в себя исполнительные органы 1 телескоиа иа экваториальной монтировке, первый 2 и второй 3 каиалы управления. Каждый из каналов управления содержит преобразователь 4 код - аналог, привод 5 с усилителем 6 и двигателем 7, редуктор 8, преобразователь 9 угол - код, сумматор 10, блок 11 анализа направления вращения, блок 12 сравнения, элемент И-ИЛИ 13. В устройство входят также логический блок 14, вычислительный блок 15, блок 16 анализа коордииат, первый 17 и второй 18 концевые выключатели, первый вход 19 устройства управления, по которому проходит заданное значение часового угла объекта наведения t.,K, второй вход 20 устройства управления, на который поступает прогнозируемое значение координаты бп, третий вход 21 устройства управления, на который поступает заданное значение координаты бзв. Входы блока 16 анализа координат обозначены соответственно 22, 23, 24, 25, а выходы - 26, 27, входы блока II анализа направления вращения - 28, 29, входы блока 12 сравнения - 30, 31, 32, а выходы - 33, 34.
В ироцессе работы устройства для управления наведением телескопа сумматор Ш канала 2 унравления фор.мирует на своем выходе, связанном с блоком 12 и элементом 13, код разности
.(1)
где if - текущее значение положения трубы телескоиа по координате t, поступающее с преобразователя 9; ЗЕ - величина значения заданного часового угла / объекта наведения, поступающая на первый вход 19 устройства управления.
Сумматор 10 канала 3 управления формирует на выходе, связанном с блоками 12 и 13, код разности
До 8 о, ,(2)
где б - код, поступающий с выхода блока 14; бт - текущее значение положения трубы телескопа по координате б, поступающее с преобразователя 9. Вычислитс;п ный блок 15 преобразует экваториальные координаты трубы телескопа ост и бт в зенитное расстояние z,-.
lia ныходс вычисл1ггелыюго блока 15 форми Пется код разности, определяющий величину текуи1, зенитного расстояния трубы телескона до значения ZQ, ог)аничивающего движение около горизонта.
(3)
Дг го -,
Иа второй вход 20 устройства управления подается величина
. -ср-г, ,(4)
где ср - ширина места установки телескопа.
Блок 14 реализует логическую схему 2И- 2ИЛИ, а элементы 13 - логические схемы ЗИ-2ИЛИ. На выходе 26 блока 16 формируется сигнал, разрешаюший прохождение через блок 14 значения бц, поступающего на вход 20 устройства управления при выполнении условий:
(5)
KI 5 зВ - Ка
озв 180 - т - 2о;
в процессе наведения телескоп должен проходить через положение (180°),
где /KI , А(2 - концевые выключатели, величину которых примем 8/i и 16/i соответственно.
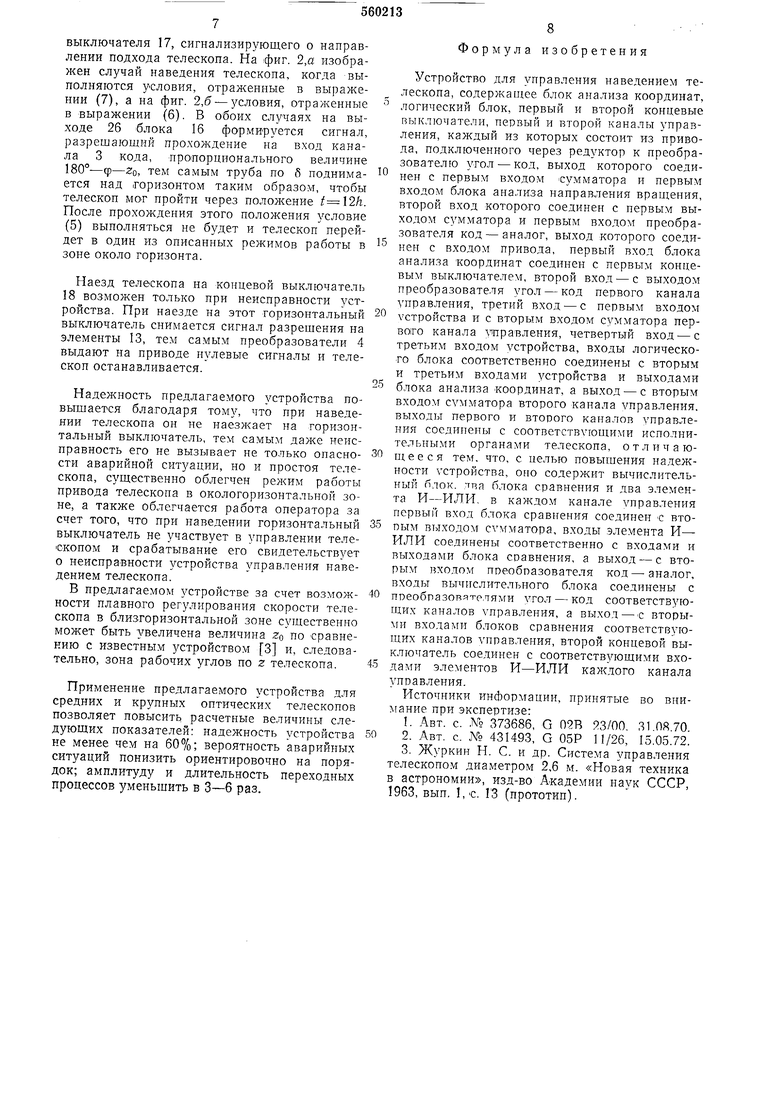
Как видно из значений из этих величин, зона рабочих углов по оси t телескопа выбрана с перекрытием концевой выключатель 17 на входе 22 формирует сигнал при развероте телескопа в пределах О-16h и к 0 з пределах 8-f-24ft. Выражение (5) можно преобразовать в сле дующие выражения; SB 180-ф-г, I2h . 180 - - o 12/1 ./3B , 12/г Выражение (5) выполняется, если выполняется хотя бы одно из выражений (6), (7). Блок 11 аиализа направления вращення канала 2 управления определяет, движется ли труба к горизонту ири враихеиии телескопа ио коордииате f, причем это происходит, если 12/г и signAi ,, + и sien( „ - Блок 11 каиала 3 управления определяет, движется ли труба к горизоитг при враилении телескоиа по координате б (б|), причем это происходит, если Зт,Г и signAo „ - Значение signA6«- принято за логичсский «О, концевой выключатель 18 срабатывает при 2макс которая несколько больше Zr,. На выходах блока 12 формируются сигналы, которые разрещают в случае, еслп KonneBoii выключатель 18 не сработал, прохождение чсрез элемент 13 кода сумматора 10 или вычислительиого блока 15. Блок 12 каиала 2 уиравления формирует на своем выходе 34 сигнал, разрещающий ирохождение кода вычислительного блока 15 через элемеит 13 только в том случае, если где - максимальная величина часового угла, ироходимого трубой телескопа за промежуток времени между опросами преобразователя 9. Во всех остальных случаях на выходе 33 блока 12 формируется сигнал, ироиускающий через элемент 13 код сумматора 10. Функииональная схема и работа блока 12 канала 3 управления такие же, как у блока 12 канала 2 управления. Условие формирования на выходе 34 сигнала, разрешающего прохождение кода вычислительного блока 15 через элемент 13 этого каиала управления, имеет вид Работает устройство следующим ооразом. иаведения и б;,„) Координаты объекта поступают на входы 19, 21 устройства управления и преобразователя 9. Если телескоп не иаходится в зоне близ горизонта, то код бзв, иройдя через блок 14. поступает на вход сумматора 10 канала 3 управлеиия. На выходе сумматора 10 формируется код, проиорциоиальный углу рассогласования соответственно по каждой из осей, и так как на выходах 33 появляется разреншющий сигнал, то коды подаются на преобразователи 4 код - аналог. Наиряжепие с выхода этих преобразователей через усилитель Б иоступает на двигатель 7, которые, вращая в соответствующую сторону телескоп, осуществляют наведение телескопа. Рассмотрим работу телескопа в том случае, когда он находится в зоне, близкой к горизонту. Пусть наведение телеекопа происходит таким образом, что труба телескопа за счет движения ио оси б движется от горизонта, а за счет движения по оси t к горизонту, т. е. выполняется условие, сформированное в выражении (8), при этом результирующая скорость такова, что происходит движение трубы к горизонту. Вычислительный блок 15 непрерывно рассчитывает Аг, ио формуле (3). Как только блок 12 сравнения выявит, что выиолняется условие, сформированное в выражении 10, на его выходе 34 появляется разрепшюший сигнал, это нриводит к тому, что на элемент 13 начинает поступать код Дегтем самым управление приводом t телескопа уже происходит в зависимости от того, иа-сколько телескоп приблизился по z к ДОПУСТИМОЙ величине ZQ. а ие в зависимости от Ai, как было до этого. Знак напряжения на преобразователе 4 определяется знаком Mi, поступающим па вход преобразователя 4 непосредственно с выхода сумматора 10. В таком режнме обеспечивается управление приводом до тех пор, пока не умеиьптится настолько, что А, Режим уиравлеиия. пропорииональный Az, может закончиться и переходом вновь на управление приводом пропорционально А,-, когда станет выполняться неравенство /Аг/ /Af/. Аналогично происходит управление телескоиом ио оси б в зоне, близкой к горизонту в тех случаях, если ири наведении телескоиа его труба за счет наведения по оси t движется от горизонта, а за счет двилчения ио 6, наоборот, к Горизонту, при этом результирующая скорость такова, что происходит двилчеиие трубы к горизонту. На фиг. 2а, б изобрал ены случаи наведения телескопа Т на звезду Зв. находяп1уюся в зоне концевых выключателей ио t. Наведение в этих случаях происходит с учетом концевого
выключателя 17, сигнализирующего о направлении подхода телескопа. На фиг. 2,а изображен случай наведения телескопа, когда выполняются условия, отраженные в выражении (7), а на фиг. 2,6 - зсловия, отраженные в выражении (6). В обоих случаях на выходе 26 блока 16 формируется сигнал, разрешающий прохождение на вход канала 3 кода, пропорционального величине 180°-ф-2о, тем самым труба по б поднимается над горизонтом таким образом, чтобы телескоп мог пройти через положение . После прохождения этого положения условие (5) выполняться не будет и телескоп перейдет в один из описанных режимов работы в зоне около горизонта.
Наезд телескопа на концевой выключатель 18 возможен только при неисправности устройства. Нри наезде на этот горизонтальный выключатель снимается сигнал разрешения на элементы 13, тем самым преобразователи 4 выдают на приводе нулевые сигналы и телескон останавливается.
Надежность предлагаемого устройства повьнлается благодаря тому, что при наведении телескопа он не наезжает на горизонтальный выключатель, тем самым даже неисправность его не вызывает не только опасности аварийной ситуации, но и простоя телескопа, существенно облегчен режим работы привода телескопа в окологоризонтальной зоне, а также облегчается работа оператора за счет того, что при наведении горизонтальный выключатель не участвует в управлении телескопом и срабатывание его свидетельствует о неисправности устройства управления наведением телескопа.
В предлагаемом устройстве за счет возможности плавного регулирования скорости телескопа в близгоризонтальной зоне существенно может быть увеличена величина ZQ по сравнению с известным устройством 3 и, следовательно, зона рабочих углов по 2 телескопа.
Применение предлагаемого устройства для средних и крупных оптических телескопов позволяет повысить расчетные величины следующих показателей: надежность устройства не менее чем на 60%; вероятность аварийных ситуаций понизить ориентировочно на порядок; амплитуду и длительность переходных процессов уменьшить в 3-6 раз.
Формула изобретения
Устройство для управления наведением телескопа, содержащее блок анализа координат, логический блок, первый и второй концевые выключатели, первый и второй каналы управления, каждый из которых состоит из привода, подключенного через редуктор к преобразователю угол - код, выход которого соединен с первым входом сумматора и первым входом блока анализа направления вращения, второй вход которого соединен с первым выходом сумматора и первым входом преобразователя код - аналог, выход которого соединен с входом привода, первый вход блока анализа координат соединен с первым концевым выключателем, второй вход - с выходом преобразователя угол-код первого канала управления, третий вход - с первым входом
устройства и с вторым входом сумматора первого канала управления, четвертый вход - с третьим входом устройства, входы логического блока соответственно соединены с вторым и третьим входами устройства и выходами
блока анализа координат, а выход - с вторым входом сумматора второго канала управления, выходы первого и второго каналов управления соединены с соответствующими исполнительными органами телескопа, о т л н ч а ющееся тем, что, с целью повыщения надежности устройства, оно содержит вычислительный блок, два блока сравнения и два элемента И-ИЛИ, в каждом канале управления первый вход блока сравнения соединен -с втопым выходом сумматора, входы элемента И- ИЛИ соединены соответственно с входами и выходами блока сравнения, а выход - с вторым входом преобразователя код - аналог, входы вычислительного блока соединены с
преобразовятелями угол - код соответствующих каналов управления, а выход-с вторыми входами блоков сравнения соответствующих каналов управления, второй концевой выключатель соединен с соответствз ющими входами элементов И-ИЛИ каждого канала управления.
Источники информации, принятые во внимание при экспертизе:
1. Авт. с. ,Vo 373686, G 02B 23/00. 31.08.70.
2. Авт. с. № 431493, G 05Р 11/26, 15.05.72,
3. Журкин Н. С. и др. Система управления
телескопом диаметром 2,6 м. «Новая техника
в астрономии, изд-во Академии наук СССР,
1963, вып. 1,С. 13 (прототип).
fx ffffh XflSftj
Oh


| название | год | авторы | номер документа |
|---|---|---|---|
| Телескоп | 1983 |
|
SU1108379A1 |
| Система управления телескопом | 1984 |
|
SU1238026A1 |
| Устройство для полуавтоматической коррекции положения азимутального телескопа | 1973 |
|
SU481022A1 |
| Система управления телескопом | 1986 |
|
SU1390600A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |