При отсутствии груза в к зове автосамосвала выражение (1) тфеобразуется к
виду:
i |.
Pj - pcajj-f Ci
где Р - вей подрессоренной массы автосамосвала;
U.
-к V
давление соответственно в основном цилиндре и в цилиндре j противодавления при отсутсгвии груза Б кузове,г
Вес груза р . может быть вычислен кЗл
.р
Р -Р к.г к
или
(a,,.p-a«)-fi:Cc|.-c). (5)
Вьфажения в скобках можно заменить приращениями давления
о. а.,
где л О.
приращение давления в основном цилиндре при груза в кузове:
Я .
где д - приращение давления в иилиндре прогиводавления при налиНИИ груза в кузове.
Посколысу всегда О :s d - величина АО к 1к.г
отриыдтельна.
Подставляя формулы (4) и (5) в форму-s (3), пoлyчae f
пу
Py-F Слй- ПСл) (б)
или, иначе,
(аЯ)
(7)
Измеряя нрираиюпия давления в цилиндрах подвески, можно с помощью выражения (6) или (7) оп)одолигь вес груза.
Для измерения давления в устройстве применены датчики давления, выходным сигналом которых является изменение сопротивления.
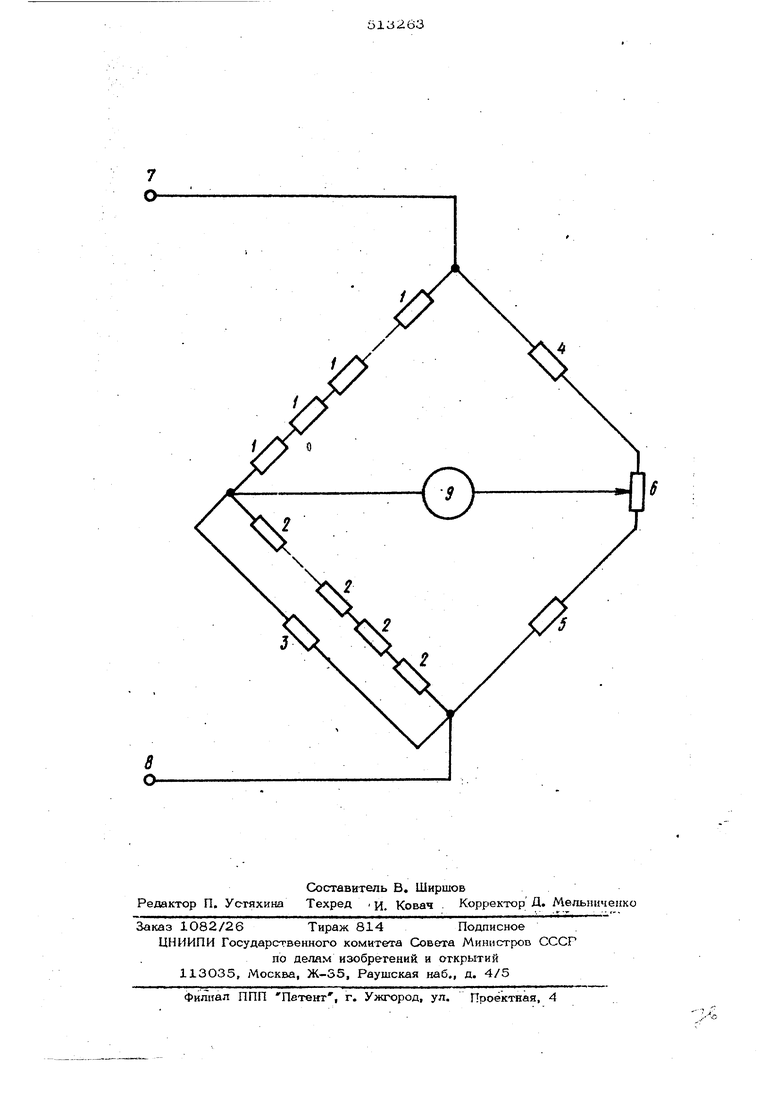
Да чертеже показан измерительный мосг. . Датчики давления 1, установленные в основных цилиндрах подвески, в схеме моста включены последовательно. Число датчиков 1 соогвегсгвуог числу подвесок автосамосвала. Датчик 2, установленные в цилиндрах противодавления подвески, также включены последовагелк.но и установлены в соседнем
плече моста. Последовательное соединение датчиков 2 защунтировано резистором 3, сопротивление которого:
где N - число цилиндров в подвеске;
В - сопротивление датчика давления Р - площадь основного цилиндра, . - площадь цилиндра противодавления.
Сопротивления резисторов 4 и 5 в других плечах измерительного моста равны
(9)
-, ЛЮ)
I
где 1$. - постоянный коэффициент.
Переменный резистор 6 предназначен для балансировки моста.
На клеммы 7 и 8 подается напряжение питания, а вольтметр 9 проградуирован в значениях веса груза.
Шунтирование последовательного соединения датчиков давления 2 резистором 3 позволяет повысить точность измерений.
Формула изобретения
1.Устройсгво ОЛЯ измерения веса груза в кузове автосамосвала, содержащее датчики давления, установленные в основных цилиндЛ pax каждого пневмогидравлического цилиндра подвески и включенные в одно из плеч измерительной мостовой схемы, о т- л и чающееся тем, что, с целью повь щения ТОЧНОСТИ; оно снабжено дополнительгЛ ными датчиками давления, установленными в цилиндрах противодавления пневмогидравлических подвесок и последовательно включеными в смежное с основными датчиками плечо измерительной мостовой схемы.
40
2.Устройство по п. 1, отличающееся тем, что дополнительные датчики зашунтированы резистором, сопротивление
которого определяется по формуле 45
где R - сопротивление датчика давления; Л- число датчиков; р - площадь основного цилиндра под80 вески;
I - площадь цилиндра противодавления подвески. . 

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО САМОСВАЛОМ, И ПОДВЕСКИ КАРЬЕРНОГО САМОСВАЛА | 2005 |
|
RU2311620C2 |
| Система регулирования характеристики подвески транспортного средства | 1990 |
|
SU1773743A1 |
| Устройство для управления положением платформы транспортного средства | 1978 |
|
SU783057A1 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| Устройство для взвешивания грузов в кузове большегрузного автосамосвала | 1983 |
|
SU1089428A1 |
| КОНВЕЙЕРНЫЙ СТЕЛЛАЖ (СКЛАД) С АВТОМАТИЧЕСКИМ АДРЕСОВАНИЕМ ПОДВЕСОК | 1970 |
|
SU264506A1 |
| Преобразователь веса бурового инструмента и осевой нагрузки на долото | 1983 |
|
SU1148981A1 |
| Устройство для автоматического управления механизированным стеллажом | 1987 |
|
SU1452774A1 |
| Преобразователь веса бурового инструмента и осевой нагрузки на долото | 1981 |
|
SU1002544A1 |
| МАССОВЫЙ РАСХОДОМЕР | 1991 |
|
RU2018090C1 |