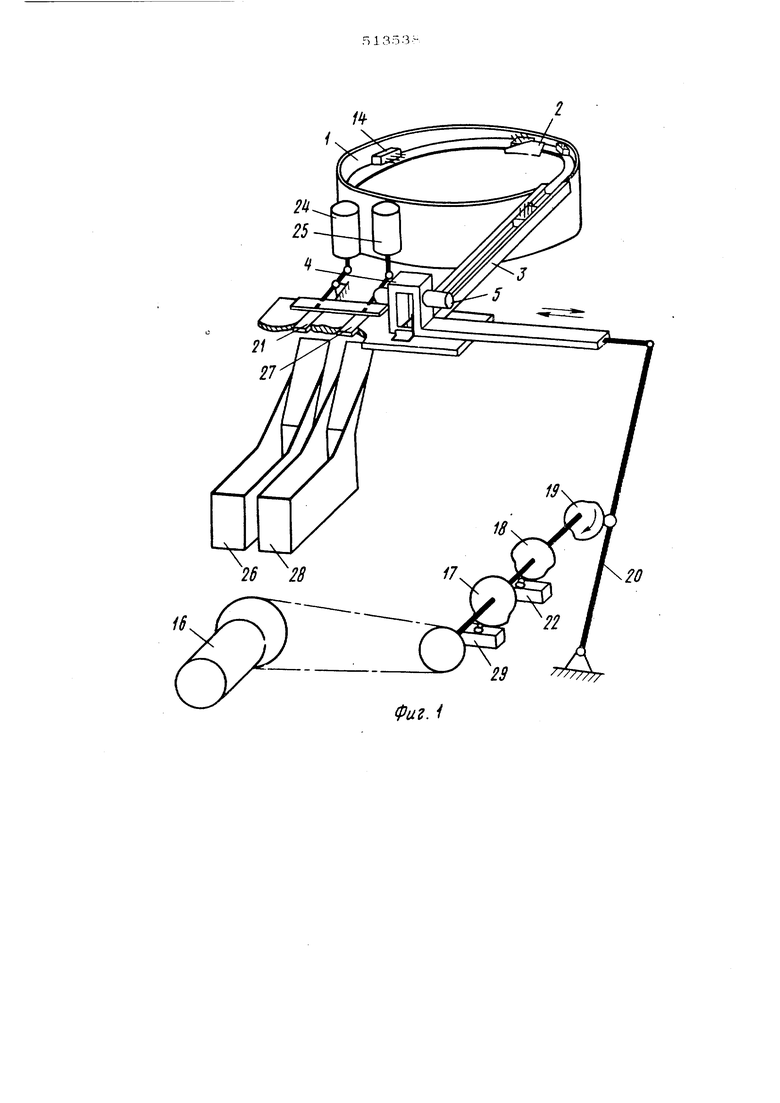
(54) УСТРОЙСТВО ДЛЯ КО ПЛОС 1 Изобретение относится к технологическому оборудованию для производства радио 1влителей, в частности плоских модулей. . , Известны устройства для контроля элект рических параметров плоских :модулей, содер жащие вибробункер с лотком, на конце которого размещен захват-контактор, соединен ный с измерительным блоком, приемную тару с заслонками, приводной механизми ис«точник питания. Недостаток известных устройств состоит в тем, что |подкл1очение проверяемых плоских модулей производится вручную с установкой их в контактную ро.зетку в определенном ориентированном положении. Цель изобретения - обеспечение контроля параметров модуля независимо от положения его по длине на измерительной позиции. Поставленная цель достигается тем, что измерительный блок .снабжен электронным реле, управляющий вход которого через реле времени соединен с контактом захва.та-контактора, выполненчого в виде П -образного ползуна с расположенными на его ОЛЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ МОДУЛЕЙ стенках электромагнитами, обмотки кото.рых соединены с источником питания. На фиг. 1 показана принципиальная кинематическая схема предложенного устройст- ® -захват-контактор с плосКИМ модулем и возможные цоколевки плоского модуля; на фиг. 3 - схема включения электронного реле. Устройство для контроля электрических параметров плоских модулей содержит аибробункер 1 с клиновым ориентиром 2 и приемным лотком 3, на конце которого размещен захват-контактор. 4, выполненный в виде П -образного ползуна с расположенными на его стенках электромагнитами 5 и двумя якорями 6, установленными шарнир но на осях 7. рбмэтки электромагнитов 5 соединены с«источником питания. Якори 6 имеют текстолитовые прокладки 8, в ячейках которых установлены контакты 9, соединенные с управляющим входом электронного реле 1О, 11 через реле времени 12, 13. Устройство работает следующим образом,.
Плоские модули 14 из ,ибробункера1 1 по спиральному лотку чаши, проходя клиновый ориентир 2, поступают в приемный лоток 3. Клиновый ориентир 2 поворачивает плоские .модули, находящиеся в горизонтальном положении, выводами вверх, осуществляя при этом вторичную ориентацию, а первичная ориентация по длине плоского -мояуля-опреавя«етс;.я -тйирйн0й лотка, При крайнем правом положении корпуса захвато-контактора ,4 плоский модуль входит в захват-контактор.
В исходном положении контакты 9 под воздействием пружинных толкателей 15 раздвинуты Электродвигателем 16 {фиг, 1 приводятся во вращательное движение кулачки 17, 18, 19, профиль,которых определяет цикл работы. Воздействием кулачка 19 на рычаг 2О модуль 14 перемеща-. ется в захвате-контакторе 4 на измерительную позицию над заслонкой 21,
При нахождении модуля на измерительной позиции кулачок 18 включает выключатель 22, который подключает напряжение питания к .электромагнитам 5 (фиг, 3 контакты которого соединяюггся с выводами модуля 14, Включается электронное реле 1О, 11 и реле времени 12, 13, которое на время ориентации Т подключает к управляющему входу электронного реле контакты захвата-контактора 4 и после окончания времени Т выдает сигнал пуск на измерительный, блок 23 (автоматический тестер проверки статических параметров плоского .модуля 4 НО2, 6С41, 6С42
Плоский модуль 14 может находиться в захвате-контакторе 4 в двух -положениях В одном положении первый вывод плоского модуля 14 соединен с контактом 1 3(ахвата-контактора 4, в другом положении первый вывод плоского модуля 14 соединен с контактом 8 захвата-контактора, В первом случае электронное реле 1О, 11 не срабатывает, так как между контактами , З плоского модуля 14 подключена цепь, сопротивление которой 1, 2 ко (порог срабатывания электронного реле пр сопротивлении входа больше 3 ком). Следовательно, выводы плоского модуля будут подключены к соответствующим входам измерительного блока 23 через нормально замкнутые контакты реле 11. Во втором случае электронное реле 1О, 11 срабатывает, так как к контактам , 5 захвата-контактора подключено внутреннее сопротивление плоского модуля 14 порядка 5, 6 ком, соединенное с выводами 8, 4. В этом случае реле 11 контактами 1, 2 самоблокируется, выводы гоюского модуля подключа-отся к нзмеригельному блоку 23 в необходимом порядке через нормально разомкнутые контакты реле 11, Откоючение кот1тактов 1, 5 захвата-контактора от входа электронного реле 1О, 11 по истечению времени Т необходимо для исключения влияния входных цепей электронного реле на электрические параметры плоского модуля при их проверке,
При дальнейшем вращении кулачка 18 выключатель 22 отключается, электромагнит 5 .обесточивается, контакты 9 захвата-контактора отходят от выводов плоского модуля и занимают исходное положение, Одновременно отключаются электронное реле Ю, 11 и реле времени 12, 13.
Измерительный прибор 23 за период времени между подачей команды пуск и отключением выключателя 22 измеряет электрические параметры плоского мудуля 14 и в зависимости от годности его включает соответственно электромагниты 24, 25.
При ГОДНОМ плоском модуле включается электромагнит 24, открывающий заслонку 21, годный модуль соскальзывает в приемную тару 26, Если плоский модуль бракованный, включается электромагнит 25, открывающий заслонку 27, В процессе перемещения устройства в исходное положение бракованный плоский модуль 14 проваливается в окно, открытое заслонкой 27, и попадает в приемную тару 28.
При возвращении захвата-контактора 4 в крайнее первоначальное положение кулачок 17 через выключатель 29 подает команду сброс а измерительньй блок 23, после чего в блоке 23 стирается старая информация, и устройство готово к следующему циклу из.меренйя.
Формула изобретения
Устройство для контрэля электрических
параметров плоских модулей, содержащее вибробункер с лотком, на конце которого размещен захват-контактор, соединенный с измерительным блоком, приемную тару с заслонками, приводной механиз.: и источник
питания, отличающееся те.м, ;что, с целью обеспечения -возможности контроля параметров модуля независимо от положения его по длине на измерительной позиции, измерительный блок снабжен электронным реле, управляющий вход которого через реле времени соединен с контактами захвата-контактора, выполненного в виде П -образного ползуна.,с расположенными на его стенках электро.маг-нитами, обмотки
которых соединены с источником питания. Фиг. i
////7///7//////////////////
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки плоских модулей и микросхем | 1984 |
|
SU1285640A1 |
| Автомат для контроля и сортировки герконов | 1985 |
|
SU1343456A1 |
| Автомат для контроля и сортировки герконов | 1989 |
|
SU1772835A1 |
| Устройство для автоматического регулирования подачи изделий между агрегатами автоматической линии | 1950 |
|
SU94627A1 |
| АВТОМАТ ДЛЯ ДОЗИРОВКИ РЫБЫ В ТАРУ | 1966 |
|
SU183118A1 |
| Устройство для поштучной подачи шаров в шаровую мельницу | 1985 |
|
SU1344413A1 |
| В П Т Б | 1973 |
|
SU395790A1 |
| АВТОМАТ ДЛЯ РАЗБРАКОВКИ ПОЛУПРОВОДНИКОВЫХ | 1973 |
|
SU390601A1 |
| Устройство для управления закорачивающим выключателем при плавке гололеда | 1989 |
|
SU1642544A1 |
| Панель синхронизации генераторов учебной электростанции | 1986 |
|
SU1403218A1 |


Фиг.З
