1
Изобретение касается автома тизации процессов загрузки и разгрузки технологического оборудования.
Известны ыанипуляторы, выполненные в виде механической руки, установленной на тележке, перемещающейся по рельсам.
иписываемый манипулятор отличается от известных тем, что его рука связана с механизмом поворота через двойной шарнир и снабжена опорным диском со срезом, заключенным в роликах, закрепленных в корпусе механизма поворота.
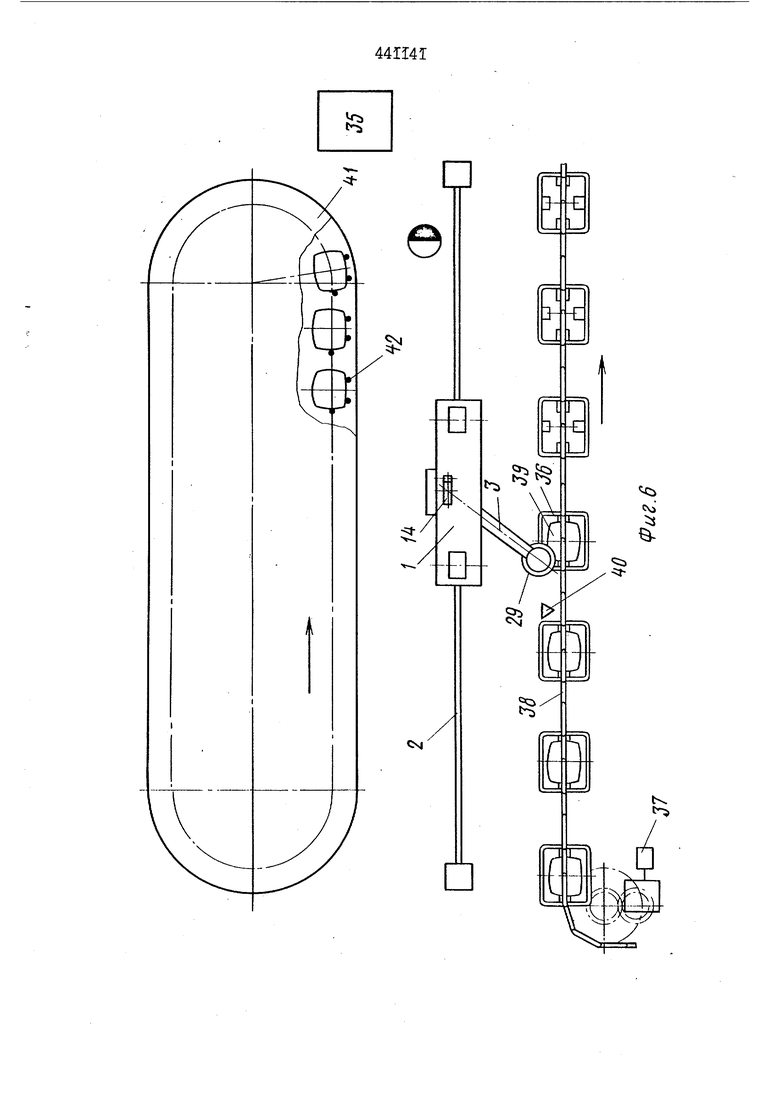
На фиг. I показан описываемый манипулятор; на фиг 2 - разрез по А-А на фиг, I; на фиг, 3разрез по Б-Б на фиг. I; на фиг, 4 - разрез по В-В на фиг, I; на фиг, 5 - разрез по Г-Г на фиг,1; на фиг, 6 - компоновка манипулятора, транспортного конвейера и технологической машины, план.
Манипулятор включает телех-j
|ку I, смонтированную на монорельсе 2, механическую руку 3 с захfватным органом 4 и механизм 5 поворота руки относительно вертикальной и горизонтальной осей.
Теленка I имеет 4 колеса 6 и восемь-боковых ограничительных роликов для качения по монорельсу. На тележке имеются два приво0 .да: привод горизонтального перемещения тележки содержит червячный редуктор 7, получающий движение от двигателя 8 постоянного тока и вращающий шестерню 9, которая взаимодействует с рейкой 20, неподвижно закрепленной на монорельсе 2, Привод вертикального перемещения руки состоит из двигателя II постоянного тока,
0 червячного редуктора 12, шестерни 13 и рейки 14, которая жестко Связана с валом 15 механизма поворота руки. Рейка 14 имеет возможность вертикального перемеще5 Б направляющих роликах тележки 1,
- Механизм поворота руки получает движение от электродвигателя 16 постоянного тока, вращающего через коническую зубчатую передачу 17 валик 18. На валике установлены две электромагнитные муфты. Лри включении одной из них движение передается через зубчатую цилиндрическую передачу 19 и червячную пару 20 - в этом случав весь механизм поворота 5 вместе
с рукой 3 поворачивается относительно вертикального вала 15. При включении двугой муфты движение передается .через цилиндрическую передачу 21 и червячную пару 22 в этом случае рука с захватным органом поворачивается относительно горизонтальной оси (.вала 23).
Каждый двигатель постоянного тока через безлифтовый редуктор соединен с сельсином 24 и тахогенератором 25, Сельсин обеспечивает отключение соответствующего электродвигателя после выполнения заданной программы перемещения, а тахогенератор - регулирование скорости перемещения,
Механическая рутш 3 представляет собой рычаг, соединенный с помощью двойного шарнира 26 с выходным валом 23 механизма поворота. Рука имеет опорный диск 27 со срезом, лежащий на одном из роликов 28. Два боковых ролика ограничивают возможность смещения руки. Для устранения зазоров оси роликов 28 выполнены эксцентричными. Захватный орган содержит резиновый присос 29, вакуум к которому подается через подпружиненный золотник 30, открывающийся при соприкосновении конца золотника с изделием.
Для сброса изделия предусмотрена подача в присос сжатого воздуха от электромагнитного клапана, установленного на стойке крепления монорельса.
Захватный орган 4 манипулятора соединен с рукой 3 при помощи шариковой опоры 31, вмонтированной в корпус захвата и содержащей два горизонтальных ряда шариков 32 по четыре штуки в каждом. Шарнирная опора захвата расположена между двумя пластинамикорпуса 33 руки 3. Две пружины 34 удерживают захватный орган в крайнем переднем положении, которое определяется упором корпуса захватного органа 4 в стенку окна в корпусе 33 руки. Такая конструкция связи захватного органа с рукой обеспечивает возможность плавания захватного органа в горизонталь; ной плоскости В пределах зазора между корпусом захвата и стенками Окна в корпусе 33 руки. Этот зазор достаточен для компенсации несовпадения центра изделия с центром позиции технологической или транспортной машины.
Привод всех движений манипулятора осуществляется двигателями 8,11 и 16 постоянного тока. Последовательность включения электродвигателей, скорости перемещения частей, включение и выключение электромагнитных муфт и электромагнитного клапана задаются прог0 раммны1л устройством, установленным в пульте 35 программного управления. Программа составлена так, что при съеме изделия с подвески 36 непрерывно движущегося
5 с большой скоростью транспортного конвейера (или установке) скорость перемещения захватного органа становится равной скорости транспортЕюго конвейера, ато ооес0 печивается за счет того, что тахогенератор - датчик 37, кинематически связанный с цепью транспортного конвейера 38, задает при помощи приемника-тахогенератора 25 35 нужную скорость двигателю 8 продольного перемещения тележки I или двигателю 16 поворота руки относительно вертикальной оси,
Для осуществлений перегрузки изделш, например экрана У цветного кинескопа, комплект средств перегрузки включает считывающее устройство 40, дающее команду на включение манипулятора в 45 случаях, когда на подвеске 36 находится экран, который должен быть установлен на машину 1 алюминирования экранов. Позиции машины алюмииирования имеют непрерывное движение. Каждая позиция оснащена тремя упорами 42, установленными так, что если наружный контур экрана соприкасается со всеми тремя упорами, то его центр совмещен с центром позиции.
Работает манипулятор в следующей последовательности. Захватный орган манипулятора находится в начальном положении, ожидая команды на включение. При подходе к манипулятору подвески 36 транспортного конвейера с полуфабрикатомэкраном 39, который должен быть установлен этим-манипулятором в позицию технологической машины, считывающее устройство 40. установленное на трассе конвейера, д ет команду на включение манипуля тора. Последовательность всех дв жений манипулятора до возвращени его в исходное положение определяется программным устройством. От команды пульта 35 программного управления включается двигатель 1ц и ыеханическая рука 3 поворачивается относительно ва 15с линейной скоростью центра р зинового присоса 29, равной скорости транспортного конвейера, д совмещения центра присоса 29 с центров изделия - экрана 39, находящегося в подвеске. Двигатель 16отключается, и включается электродвигатели 8 и II. Двигатель В перемещает телзжку I по монорельсу 2 вдоль трассы транспортного конвейера со скоростью, равной скорости конвейера. При включении двигателя II механическая рука дви :сеася вниз до соприкосновения золотника 30 с купилоы экрана кинескопа, золо тник устанавливается, в захват подается вакуум, и изделие закре пляется в захватном органе 4. Поиле захвата изделия рука 3 уже Быесте с изделием поднимается, и двигатели 8 и II отключа тся, включается двигатель 16. Поворот руки относительно вертикальной оси выводит изделие с за ватным упором из движущейся подв ски транспортного KOHb-eMjpa. На этом заканчивается первый этап программы - съем изделия с подве ки непрерывно движущегося с боль шой скоростью транспортного конвейера, Следующий этап - установка изделия в позицию технологической (или транспортной) машины. Программа движения манипулятора на этом этапе зависит от располо жения места установки изделия. За счет тех же трех степеней сво боды (перемещение вдоль монорель са, вертикальное перемещение и поворот руки относительно вертикалькой оси) изделие вводится в позицию технологической машины, например экран цветного кинескопа виодится в позицию машины 41 алюминирования экранов. Манипуля тор вводит экран в зону движения позиции машины и останавливается Позиция упорами 42 устанавливает экран так, что его центр совмещается с центром позиции. Это сов.мещение обеспечивается благодаря тому, что захватный орган 4 манипулятора соединен с рукой 3 посредством шариковой опоры 31 с возпожностью плавания в горизонтальной плоскости в пределах, достаточных для компенсации несоБпаден1-5}1 при vcTaHOHife центра изделия (экрана) с центром позиции ьшшииы. При этом прул-пны 34 растягииоитсп. После совмещения центра экрана с центром позиции машины подается команда на включение двигателя II вертикального перемещения, и экран опускается в позицию. При этом позиция непрерывно движется, но и экран движется вместе с ней, за счет заложенной в конструкцию возможности плавания в горизонтальной плоскости. Соприкосновение торца экрана- с пoвepxliocтью позиции машины алюминирования происходит мягко и безударно благодаря соединению руки с механизмом поворота при помощи двойного шарнира :6. До соприкосновения торца экрана с позицией машшы aJлOIJинирования, IJVKB 3 опира егся опорным диском 27 на ни.йний ролик 2а. При установке экрипа вместе с захватным органом отклоняется вверх, так как срез на опорном диске 27 обеспечивает возможность компенсации разности высот до 15 ым. Затем в вакуумный захват подается снатый воздух, и изделие остается в позиции машины, а манипулятор возвращается к позиции ожидания перед трассой транспортноги конвейера. Перед тем как экран устанавливается в позицию машины алюминирования, требуется произвести визуальный контроль экрана и вынуть из него маску. Для этого экран перед установкой на машину алюминирования поворачивается на 180 относительно горизонтальной оси (вала 23) и располагается внутренней ОБООй пиверхиостью вверх. Плавный поворот изделия (экрана) обеспцчиваегсг ппличивм двойного шарнира 26,при это.м ииорныИ диск 27 взаимодействуетС роликами «ib, зак репленными па корпусе механизма 5 поворота руки. По получении новой команды на начало цикла манипулятор повторяет все движения, заложенные в программу. ПРЕДМЕТ ИЗОБРЕТЕНИЯ I, Манипулятор с програииныи управлением для перегрузки изделий, например крупногабаритных кинескопов, выполненный в виде переиещающейся по ионорельсу тележки, несущей механическую руку с захватом и механизмы вертикального перемещения и поворота руки, о т л и ч а ю щ и и с я тем, что с целью точной и безударной устано вки изделия в непрерывно движущиеся позиции, рука снабжена опорным диском со срезом взаимодействующим с роликами, закрепленными на корпусе механизма поворота и соединена с механизмом поворота при помощи двойного шарнира. 2. Манипулятор по пЛ, о f л и ч а ю щ и йся тем,чтв захват соединен с рукой посрадстюм шариковой опоры с возможностью плавания в горизонтальной плоскости. 44II4I
АА
Б- 6
Фиг. 2
Фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU542641A2 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Система автоматической разгрузки туннельной печи тепловой обработки стеклооболочек цветных электронно- лучевых трубок | 1977 |
|
SU722755A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Конвейерная линия | 1976 |
|
SU646381A1 |
| УСТРОЙСТВО ДЛЯ ОТКАЛЫВАНИЯ НАБЕЛЯ КОНУСА ЭЛЕКТРОННО-ЛУЧЕВОЙ ТРУБКИ | 1991 |
|
RU2116980C1 |
| СИСТЕМА РАЗГРУЗКИ И СПОСОБ РАЗГРУЗКИ ТРАНСПОРТНОЙ ТЕЛЕЖКИ ДЛЯ ПРОТЕКТОРОВ ШИН | 2015 |
|
RU2656465C2 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| Манипулятор | 1984 |
|
SU1333567A1 |


в- в Фиг.ц
г-г Фиг. 5
