1
Изоб ретение относится к системам управления дистанционных манипуляторов с отражением усилий и может быть использовано при создании высокоточных :Манипуляторных устройств, управляемых человеком- оператором.
Известны устройства для управления звеном очувствленного манинулятора, содержапдие привод задающего органа, перзый выход которого по положению связан со входом привода исполнительного органа и первым входом анализатора скорости, к соответствующим выходам которого подключены обмотки четырех реле, выход по нагрузке прнвода исполнительного органа связан со входом блока выработки комненсирующего сигнала и с первым входом привЪда задающего органа, а выход привода исполнительного органа по положению соединен со -вторым входом анализатора скорости, причем выходы блока выработки компенсирующего сигнала через нормально разомкнутые контакты четырех реле связаны с соответствующими входами сум-матора, выход которого соединен со вторым входом привода задающего органа. Однако известное устройство характеризуется относительно низкой точностью компенсации трения в приводах исполнительного органа вследствие того, что в компенсирующем сигнале не учитываемся влияние упругих пеформаций приводов исполнительного органа. При подаче на вход привода исполнительного органа сигнала привода задающего органа в первый момент двигатель преодолевает упругость самого привода исполнительного органа, что фиксируется датчиком нагрузки, причем сигнал, снимаемый с датчика нагрузки, в этот момент возрастает плавно, в то время как включение комненсирующего сигнала имеет ступенчатый характер. Следовательно, только при движении исполнительного органа происходит точное компенсирование сил трения.
Целью изобретения является увеличение точности воспроизведения нагруз-ки от объекта манипулирования. В описываемом устройстве это достигается тем, что оно содержит два апериодических звена, входы которых через нормально разомкнутые контакты соответствующих реле подключены к выходам блока формирования компенсирующего сигнала, а выходы апериодических звеньев подключены к соответствующ-им входам сумматора.
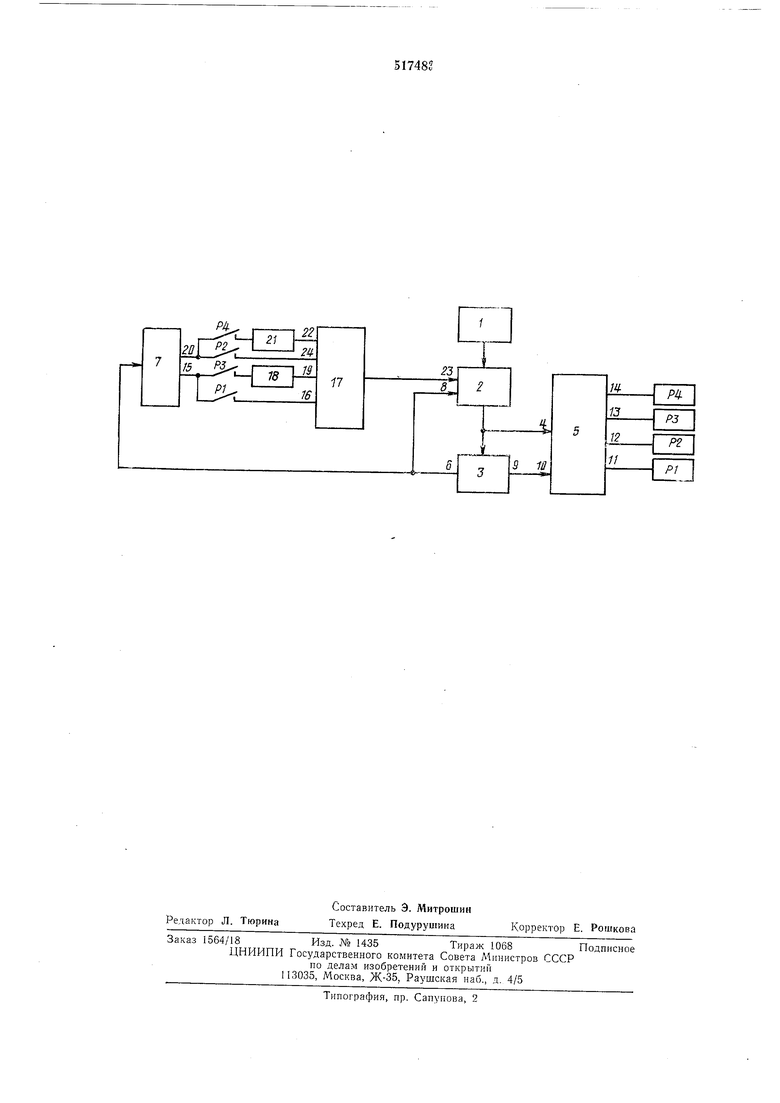
На чертеже показана функциональная схема описываемого устройства.
Оператор 1 управляет приводом задающего органа 2. Выход по положению привода задающего Органа 2 соединен со входом привода исполнителыного органа 3 и входом 4
анализатора скорости 5. Выход 6 привода исполнительного органа 3 соединен со входом блока выработки компенсирующего сигнала 7 и со входом 8 привода задающего органа 2. Выход 9 привода исполнительного органа 3 соединен со входом 10 анализатора скорости 5, выходы 11, 12, 13 и 14 которого соединены соответственно с обмотками реле Р1, Р2, РЗ и Р4. Выход 15 блока выработки компенсирующего сигнала 7 через замыкающий контакт реле Р1 подключен ко входу 16 сумматора 17 и через замыкающий контакт реле РЗ-ко входу апериодического звена 18, выход которого соединен со. входом 19 сумматора 17. Выход 20 блока выработки компенсирующего сигнала 7 подключен через замыкающий контакт реле Р4 ко входу апериодического звеиа 21, выход которого соединен со входом 22 сумматора 17. Выход сумматора 17 соединен со входом 23 привода задающего органа 2.
Оператор 1 воздействует на привод задающего органа 2 и изменяет его положение относительно опоры. Сигнал с выхода привода задающего органа 2 по положению поступает на вход 4 анализатора скорости 5 и одновременно на вход П)ривода исполнительного органа 3, К01торый перемещается в нужном опе.ратору направлении. Сигнал с -выхода 9 привода исполнительного органа 3 по положепию поступает на вход 10 анализатора скорости 5.
Анализатор скорости 5 непрерывно вырабатывает сигналы, знаки которых соответствуют определенным направлениям скорости изменения углов исполнительного и задающего приводов. В зависимости от знака скорости привода исполнительного органа 3 срабатывает реле Р1 или Р2, а в зависимости от знака скорости привода задающего органа 2 срабатывает 1реле РЗ или Р4.
Сигнал с выхода 6 привода исполнительного органа 3 по нагрузке поступает на вход 8 привода задающего органа 2 и на вход блока выработки компенсирующего сигнала 7, на выходах 15 и 20 которого подготавливается напряжение «омпевсации нужного знака, пропорциональное постоянной составляющей трения движения, и через контакт реле Р1 или Р2 подается соответственно на вход 16 или 24 сумматора 17. При неподвижном приводе исполнительного органа 3 и
движущемся приводе задающего органа 2 в зависимости от знака скорости последнего срабатывает реле РЗ или Р4, и с выхода 15 или 20 блока выработки компенсирующего сигнала через контакт реле РЗ или Р4 на вход апериодического звена 18 или 21 соответственно поступает напряжение компенсации, пропорциональное постоянной составляющей трения покоя привада исполнительного органа 3, который, П1рой.дя через апериодическое звенО 18 или 21, приобретает необходимую форму и поступает на соответствующий вход 19 или 22 сумматора 17. С выхода сумматора 17 выработанный сигнал компенсации силы трения поступает на вход 23 привода задающего органа 2. Сигналы, поступающие на входы 8 и 23 привода задающего органа 2, компенсируют друг друга, чем обеспечивается отражение на руке оператора «чистого сигнала полезной нагрузки.
Ф О р м у л а ИЗ о б р е т е н и я
Устройство для управления звеном очувствленного манипулятора, содержащее привод задающего органа,, первый выход которого по положению связан со входом привода исполнительного органа и первым входом анализатора скорости, к соответствующим выходам которого подключены обмотки реле, первый выход привода исполнительного аргана связан со входом блока формирования компенсирующего сигнала и с первьгм входом привода задающего органа, второй выход привода исполнительного органа соединен со вторым входом анализатора скорости, а первый и второй выходы блока формирования компенсирующего .сигнала через нормально разомкнутые контакты соответствующих реле соединены со входами сумматора, выход которого соединен со вторым входом привода задающего органа, отличающееся тем, что, с целью повышения точности воспроизведения нагрузки от объекта манипулир.ования, оно содержит два апериодических звена, входы которых через нормально разомкнутые контакты соответствующих реле подключены к выходам блока формирования компенсирующего сигнала, а выходы апериодических звеньев подключены к соответ ствующим входам сумматора.
OD
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления процессом электроплавки медных концентратов | 1984 |
|
SU1235961A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Установка для поверки сигнализаторов давления | 1971 |
|
SU445868A1 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО | 1973 |
|
SU368989A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Систма управления дистанционным манипулятором | 1976 |
|
SU633725A1 |
| Устройство к однопериодному перфоратору для запоминания набираемых чисел | 1958 |
|
SU119733A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |