Известны шкивы для канатных транспортеров, снабженные захватами, расположенными на ободе шкива и взаимодействуюпхими с зацепами канатного тягового органа. Особенностью предлагаемого шкива является то, что захваты присоединены к ободу шкива с возможностью перемеш.ения по ободу последнего под действием тягового органа или собственного веса. Этим обеспечивается возможность сцепления шкива с зацепами тягового органа при вытягивании последнего.
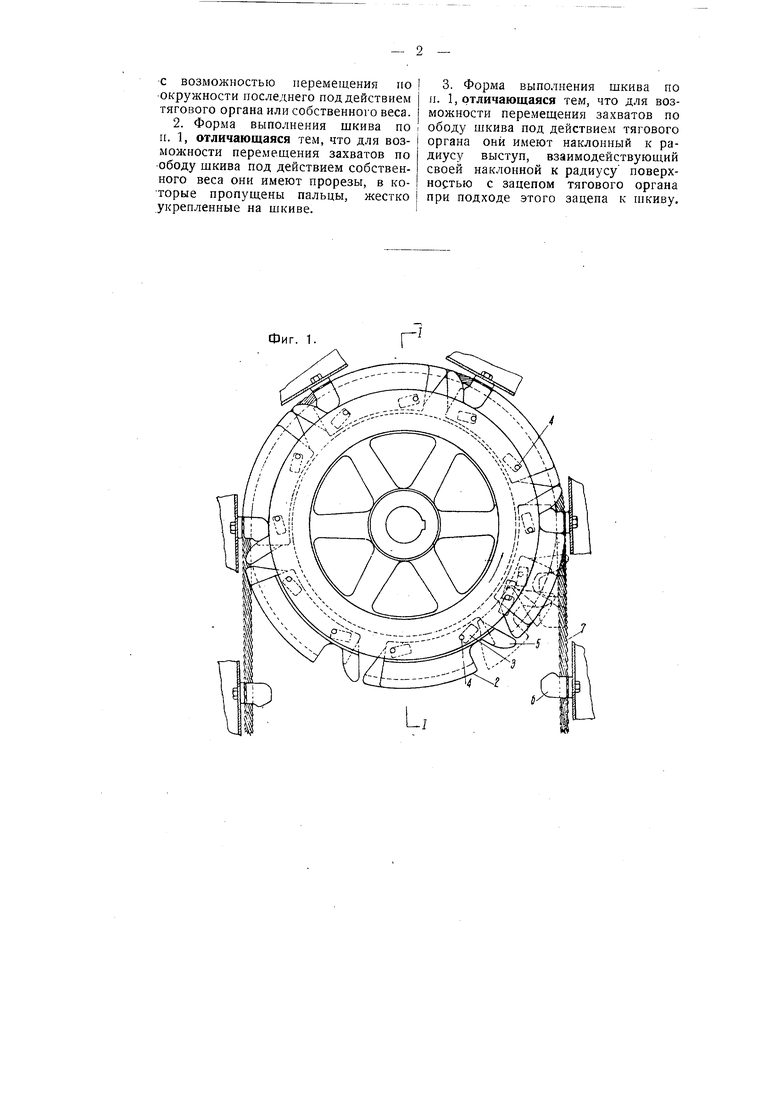
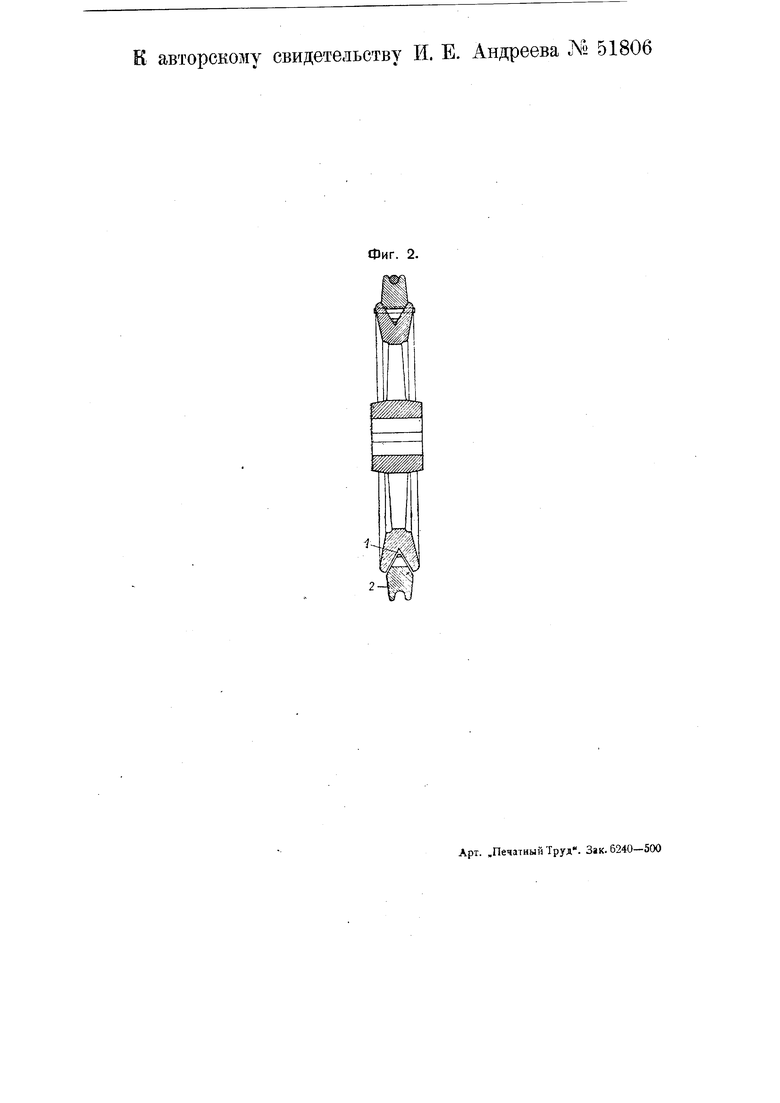
На чертеже фиг. 1 изображает общий боковой вид предлагаемого шкива и фиг. 2 - разрез но линии I -I на фиг. 1.
На ободе шкива имеется канавка 7, в которой помеш.ены захваты 2. Захваты 2 имеют прорезы 3, в которые пропущены пальцы 4, жестко закрепленные на шкиве. Вследствие такого соединения шкива с захватами последние могут смещаться по ободу пкива. Смещение захватов ограничивается пальцами 4. Захваты 2 снабжены выступами 5, расположенны.ми наклонно к радиусу шкива. Эти выступы взаимодействуют своей наклонной к радиусу поверхностью с зацепами 6 тягового органа 7.
При вращении шкива захваты 2, расположенные в верхней части шкива и взаимодействующие с зацепами б тягового органа 7, находятся в сцеплении с ободом шкива под действием силы трения. Захваты, расположенные в нижней части шкива и свободные от сцепления с зацепами 6, свободно висят на цальцах 4, опускаясь под действием собственного веса. При подходе зацепа 6 к захвату 2 происходит сцепление зацепа 6 с выступом 5 захвата, причем, вследствие возможности перемещения захватов 2 по ободу, щкива, будет обеспечено правильное сцепление между зацепами б и захватами 2 и в том случае, если расстояния между зацепами б увеличатся в результате вытягивания тягового органа (каната).
Предмет изобретения.
1. Шкив для канатных транспортеров, снабженный захватами, расположенными на ободе и взаимодействующими с зацепами канатного тягового органа, отличающийся тем, что, в целях возможности сцепления захватов шкива с зацепами тягового органа при вытягивании последнего, захваты 2 присоединены к ободу щкива
с возможностью перемещения по окружности последнего под действием тягового органа или собственного веса. 2. Форма выполнения шкива по п. 1, отличающаяся тем, что для возможности перемещения захватов по ободу щкива под действием собственного веса они имеют прорезы, в которые пропущены пальцы, жестко укрепленные на шкиве.
3. Форма выполнения шкива по п. 1, отличающаяся тем, что для возможности перемещения захватов по ободу шкива под действием тягового органа они имеют наклонный к радиусу выступ, взаимодействующий своей наклонной к радиусу поверхностью с зацепом тягового органа при подходе этого зацепа к шкиву.
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатоведущий шкив преимущественно для большегрузных канатных дорог | 1958 |
|
SU129434A1 |
| Передаточный механизм | 1936 |
|
SU53739A1 |
| Подвесная канатная установка | 1973 |
|
SU447312A1 |
| Перегрузочное устройство | 1934 |
|
SU45847A1 |
| Канатный конвейер | 1979 |
|
SU846430A1 |
| ПРОДОЛЬНЫЙ ПРОТАСКИВАЮЩИЙ ТРАНСПОРТЕР | 1969 |
|
SU237375A1 |
| Устройство для подачи подкладных досок под нагрузку на рольный стол торфоформующей машины | 1930 |
|
SU33951A1 |
| Устройство для автоматического снятия холстов и освобождения скалки на трепальных машинах | 1957 |
|
SU112664A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ТЕЛЕГРАФНЫХ БЛАНКОВ | 1971 |
|
SU417348A1 |
Фиг. 1.
Фиг. 2.
