Изобретение относится к регулируемым электроприводам малой мощности.
Р1звестен многодвигательный электропривод по основному авт. св. № 395956, осуществляющий синхронизацию вращения роторов бесконтактных двигателей постоянного тока, работающих от одного коммутатора, который управляется сигналами от датчика положения ротора отстающего по углу двигателя.
Указанное устройство обеспечивает синфазное вращение только двухполюсных двигателей, у которых углы поворота в электрических фэ и геометрических фг градусах равны.
Целью изобретения является обеспечение
синфазного (с фг -) вращения роторов
мног.ополюсных электродвигателей в диапазоне рабочих скоростей вращения.
Поставленная цель достигается тем, что в состав электропривода введены датчики синхронизации на каждый электродвигатель, две группы схем совпадения и устройство регистрации рассогласования роторов, входы которого через схемы совпадения первой группы связаны с датчиками синхронизации, а выходы - с первыми входами второй группы схем совпадения, вторые входы которых соединены с выявителем рассогласования импульсов с датчиков положения роторов, а выход подключен к коммутатору.
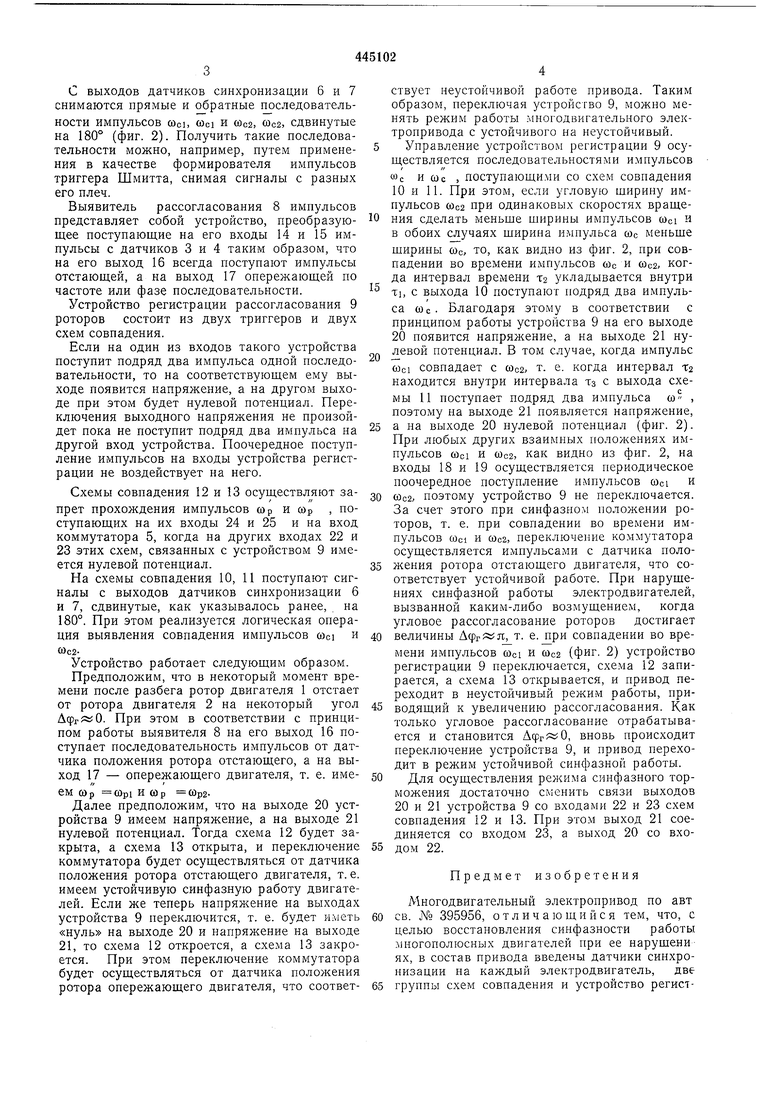
На фиг. 1 изображена структурная схема многодвигательного электропривода; на фиг.
2- временные диаграммы на элементах схемы.
Многодвигательный электропривод содержит два многополюсных электродвигателя I и 2 с установленными на их валах датчиками
3и 4 положения роторов. Электродвигатели управляются от общего коммутатора 5. На
валах электродвигателей дополнительно установлены датчики синхронизации 6, 7, выполненные по типу обычных датчиков положения ротора, например, индуктивного типа. Электропривод снабжен выявителем рассогласования 8 импульсов датчиков 3, 4, устройством регистрации рассогласования 9 роторов и двумя группами схем совпадения 10, 11 и 12, 13. Выявитель рассогласования 8 имеет два выхода 14, 15, связанные с датчиками 3, 4 и
два выхода 16 и 17. Устройство регистрации рассогласования 9 роторов также имеет два входа 18, 19, связанные через схемы совпадения 10, 12 первой группы с датчиками синхронизации 6 и 7, и два выхода 20 и 21, соединенные с первыми входами 22 и 23 второй группы схем совпадения 12, 13, вторые входы которых 24 и 25 связаны с выходами 16 и 17 выявителя рассоглягпвания 8. Выход второй группы схем совпадения 12 и 13 подключен к
коммутатору 5.
С выходов датчиков синхронизации 6 и 7 снимаются прямые и обратные последовательности импульсов (Ось (Oci и CUC2, С0с2, сдвинутые на 180° (фиг. 2). Получить такие последовательности можно, например, путем применения в качестве формирователя импульсов триггера Шмитта, снимая сигналы с разных его плеч.
Выявитель рассогласования 8 импульсов представляет собой устройство, преобразующее поступающие на его входы 14 и 15 импульсы с датчиков 3 и 4 таким образом, что на его выход 16 всегда поступают импульсы отстающей, а на выход 17 опережающей по частоте или фазе последовательности.
Устройство регистрации рассогласования 9 роторов состоит из двух триггеров и двух схем совпадения.
Если на один из входов такого устройства поступит подряд два импульса одной последовательности, то на соответствующем ему выходе появится напряжение, а на другом выходе при этом будет нулевой потенциал. Переключения выходного напряжения не произойдет пока не поступит подряд два импульса на другой вход устройства. Поочередное поступление импульсов на входы устройства регистрации не воздействует на него.
Схемы совпадения 12 и 13 осуществляют запрет прохождения импульсов сор и сор , поступающих на их входы 24 и 25 и на вход коммутатора 5, когда па других входах 22 и 23 этих схем, связанных с устройством 9 имеется нулевой потенциал.
На схемы совпадения 10, 11 поступают сигналы с выходов датчиков синхронизации 6 и 7, сдвинутые, как указывалось ранее, на 180°. При этом реализуется логическая операция выявления совпадения импульсов coci и
Шс2Устройство работает следующим образом.
Предположим, что в некоторый момент времени после разбега ротор двигателя 1 отстает от ротора двигателя 2 на некоторый угол . При этом в соответствии с принципом работы выявителя 8 па его выход 16 поступает последовательность импульсов от датчика положения ротора отстающего, а на выход 17 - опережающего двигателя, т. е. имеffI
ем (Вр Сйр1 и (up (йр2.
Далее предположим, что на выходе 20 устройства 9 имеем напряжение, а на выходе 21 нулевой потенциал. Тогда схема 12 будет закрыта, а схема 13 открыта, и переключение коммутатора будет осуществляться от датчика положения ротора отстающего двигателя, т. е. имеем устойчивую синфазную работу двигателей. Если же теперь напряжение на выходах устройства 9 переключится, т. е. будет иметь «нуль на выходе 20 и напряжение на выходе 21, то схема 12 откроется, а схема 13 закроется. При этом переключение коммутатора будет осуществляться от датчика положения ротора опережающего двигателя, что соответствует неустойчивой работе привода. Таким образом, переключая устройство 9, можно менять режим работы .многодвигательного электропривода с устойчивого на неустойчивый. Управление устройством регистрации 9 осуществляется последовательностями импульсов
с и (Ос , поступающими со схем совпадения 10 и 11. При этом, если угловую ширину импульсов (Ос2 при одинаковых скоростях вращеНИН сделать меньше ширины импульсов coci и в обоих случаях ширина и.мпульса мс меньше ширины сос, то, как видно из фиг. 2, при совпадении во времени импульсов оос и (Ос2, когда интервал времени Т2 укладывается внутри
Т, с выхода 10 поступают подряд два импульса Юс. Благодаря этому в соответствии с принципом работы устройства 9 на его выходе 20 появится напряжение, а на выходе 21 нулевой потенциал. В том случае, когда импульс
ojci совпадает с сос2. т. е. когда интервал Т2 находится внутри интервала тз с выхода схемы 11 поступает подряд два импульса ш , поэтому на выходе 21 появляется напряжение,
а на выходе 20 пулевой потенциал (фиг. 2). При любых других взаимных положениях импульсов coci и Шс2, как видно из фиг. 2, на входы 18 и 19 осуществляется периодическое поочередное поступление импульсов coci и
(Ос2, поэтому устройство 9 не переключается. За счет этого при синфазном положении роторов, т. е. при совпадении во времени импульсов Шс1 и сос2, переключение коммутатора осуществляется импульсами с датчика положения ротора отстающего двигателя, что соответствует устойчивой работе. При нарушениях синфазной работы электродвигателей, вызванной каким-либо возмущением, когда угловое рассогласование роторов достигает
величины , т. е. при совпадении во времени импульсов coci и сос2 (фиг. 2) устройство регистрации 9 переключается, схема 12 запирается, а схема 13 открывается, и привод переходит в неустойчивый режим работы, приводящий к увеличению рассогласования. Как только угловое рассогласовапие отрабатывается и становится , вновь происходит переключение устройства 9, и привод переходит в режим устойчивой синфазной работы.
Для осуществления режима синфазного торможения достаточно сменить связи выходов 20 и 21 устройства 9 со входами 22 и 23 схем совпадения 12 и 13. При этом выход 21 соединяется со входом 23, а выход 20 со входом 22.
Предмет изобретения
Многодвигательный электропривод по авт св. jYo 395956, отличающийся тем, что, с целью восстановления синфазности работы : 1погополюсных двигателей при ее нарушени ях, в состав привода введены датчики синхронизации на каждый электродвигатель, две группы схем совпадения и устройство регистрации рассогласования роторов, входы которого через схемы совпадения первой группы связаны с датчиками синхронизации, а выходы - с первыми входами второй группы схем
совпадения, вторые входы которых соединены с выявителем рассогласования импульсов датчиков положения роторов, а выход подключен к коммутатору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1976 |
|
SU582560A1 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| ВПТБ | 1973 |
|
SU395956A1 |
| Многодвигательный электропривод | 1977 |
|
SU692050A1 |
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Многодвигательный электропривод | 1986 |
|
SU1410211A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
ЕЖ
С2
h/:.4v
I -/-7
С2
О);.
Ж
2/
7777;7Л
У///////7777у
...
