;54) nPOTHBOyrOFW blH АВТОМАТИЧЕСКИЙ КЛЕЩЕВОЙ ЗАХВАТ ДЛЯ
3
рительно поджимающей губки захвата к рельсу.
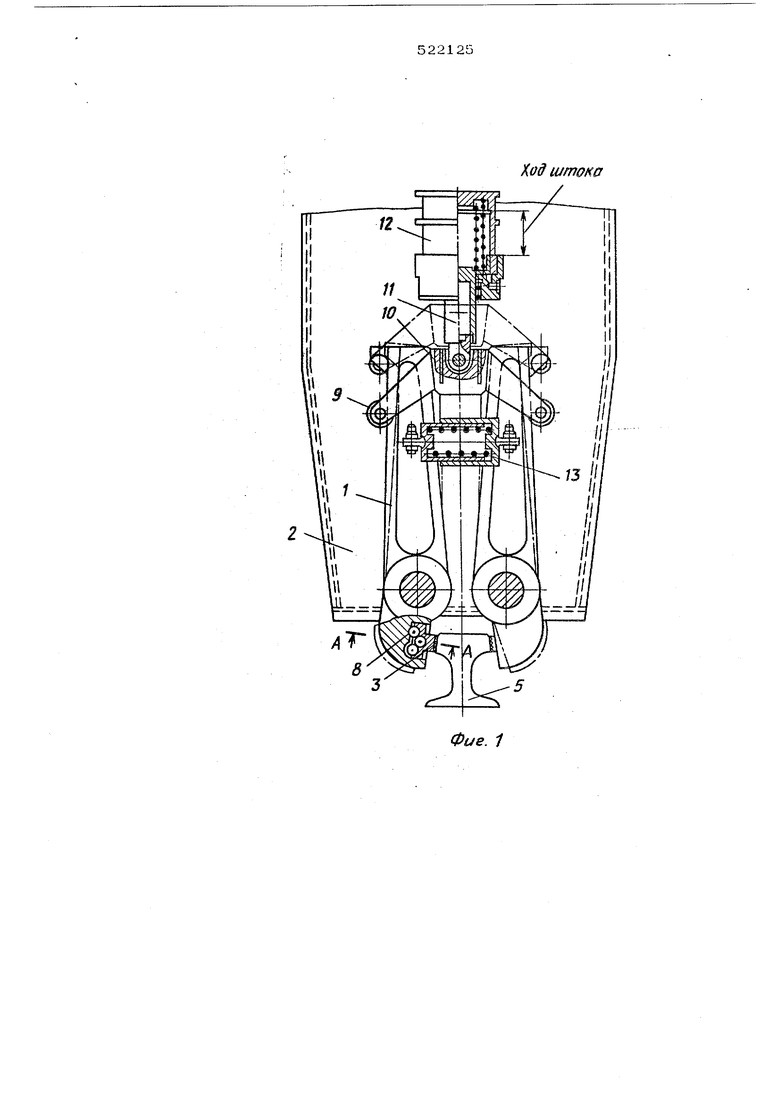
По мере того, как угонная сила ветра достигнет величины, при Koisopoft запрещена работа крана и срабатывает анемометр (через его контакты включен | электропневмклапан, запирающий воздух в пневмоцилиндре), контакты анемометра размыкаются. Эпектропневмоклапан дает возможносты воздуху выйти из полости противодавления пневмоцилиндра 12, под действием пружины которого шток 11 с клином 1 о опускается. В процессе опускания клина ролики 9 освобождают выступы рычагов и под действием распорной пружины 13 губки 3 и 4 поджимаются к головке рельса. Захват
подготовлен к работе.
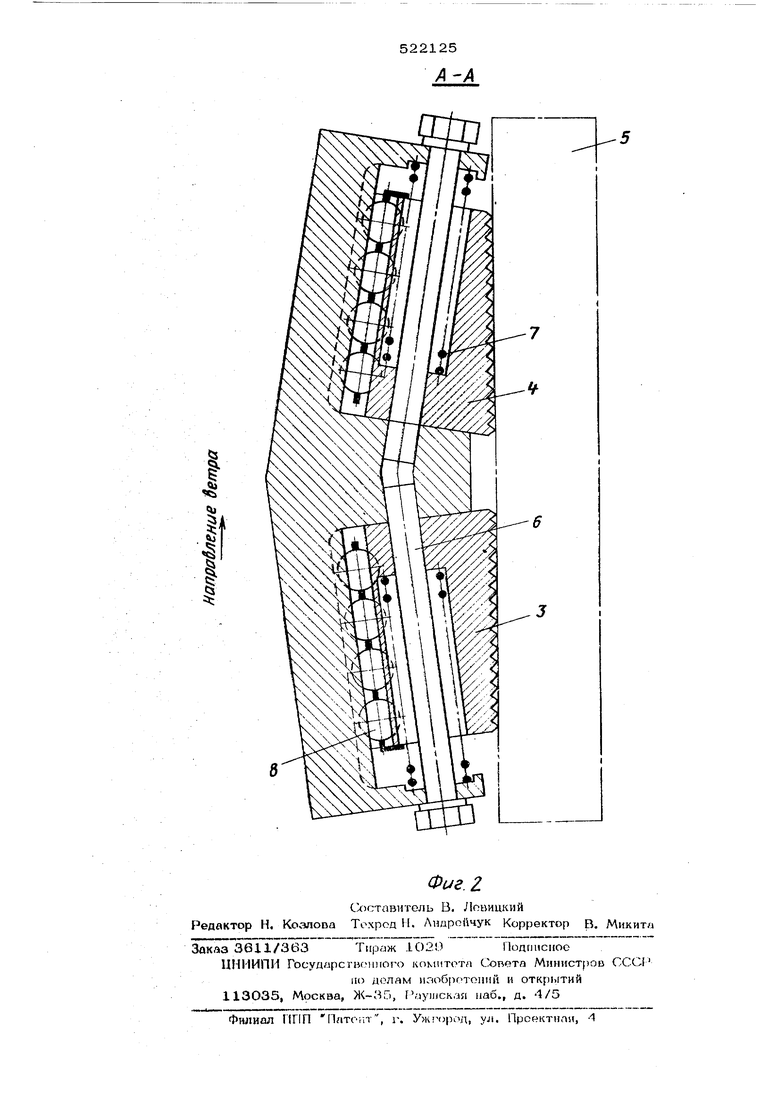
То же самое происходит и при отключении электропитания крана при его остановке или при аварии в сети электроснабжения. При дальнейшем сдвиге крана вет- ром (указан стрелкой на фиг. 2) под действием сил трения между рельсом и губдами начинается относительное перемещение пары губок 3 на подишпниках 8 по наклонным пазам рычагов, в результате чего губ ки 3 .заклиниваются между пазами рычагов и рельсом 4, пружины 7 сжимаются.
Ни поверхности соприкосновения губок и рельса возникает сила трения, пропорциональная силе ветра, удерживающая кран Ът угона. Это исключает необходимость применения силовых замыкающих устройств.
При изменении направления ветра на противоположное вступает в работу пара губо.к 4.
При подключении механизмов крана к системе электропитания автоматически включается электропневмоклапан, и воздух
25
поступает в камеру противодавления пневмоцилиндра 12, сжимая его пружину и поджимая щток 11с клином 1О. Ролики 9 клина взаимодействуют с выступами больших плеч рычагов 1 и раскрывают захват, освобождая губки от соприкосновения с рельсом. При этом пружины 7 возвращаю(г губки в исходное состояние. В таком положенин клещевой захват находится в течение всего времени работы крана.
В связи с исключением работы клина как силового замыкакщего устройства .и : нагружением захвата усилиями,. пропорциональными силе ветра, уменьшаются вес ктгн на, динамические нагрузки при опускании клина, уменьшается износ насечек губок.
Формула изобретения
1,Противоугонный автоматический клещевой захват для кранов, содержащий двуплечие подпружиненные рычаги, шарнирно закрепленные на раме в несущие на концах губки, запиракшщеся клином под действием привода, отличающийся тем, что, с целью повышения надежности захвата в работе, он снабжен подщипниками и подпружиненным штоком с губками, смонтированными на нем с возможностью переметцения на подшипниках по наклонным пазам, выполненным в нижней части рычагов.
2.Захват по п. 1, отличающи йс я тем, что, с целью уменьшения динамических нагрузок при опускании клина, на верхних концах рычагов выполнены выступы, а на клине смонтированы ролики, взаимодействующие с выступами.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1972 |
|
SU360311A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Противоугонный клещевой захват для кранов | 1985 |
|
SU1331802A1 |
| Противоугонное устройство крана | 1986 |
|
SU1323520A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| Противоугонный захват для кранов | 1988 |
|
SU1620413A1 |
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Противоугонный рельсовый захват для кранов | 1974 |
|
SU503809A1 |
| Противоугонный захват для кранов | 1972 |
|
SU437702A1 |
| Противоугольный рельсовый захват | 1972 |
|
SU437700A1 |