Изобретение относится к вспомогательному оборудованию кузнечно прес- совых цехов, а именно к конструкциям кузнечных манипуляторов.
изобретения - повьппение на дежности манипулятора и расширение его технологических возможностей за счет обеспечения возможности манипулирования длинномерными заготовками,
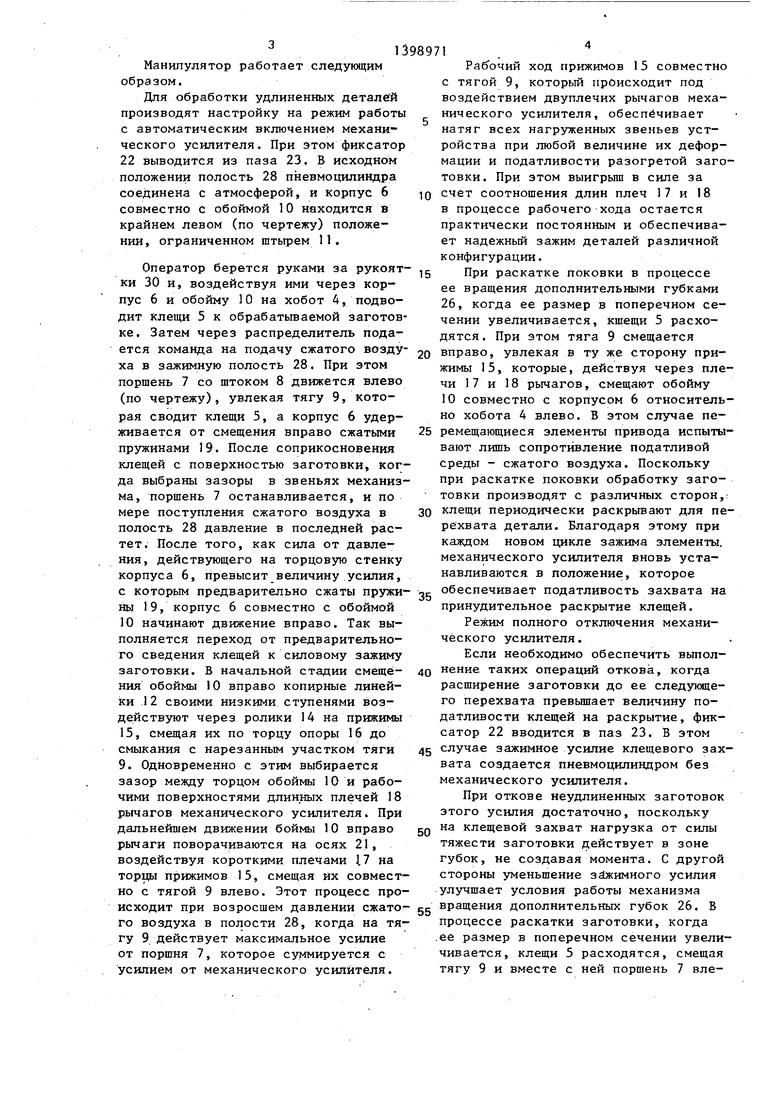
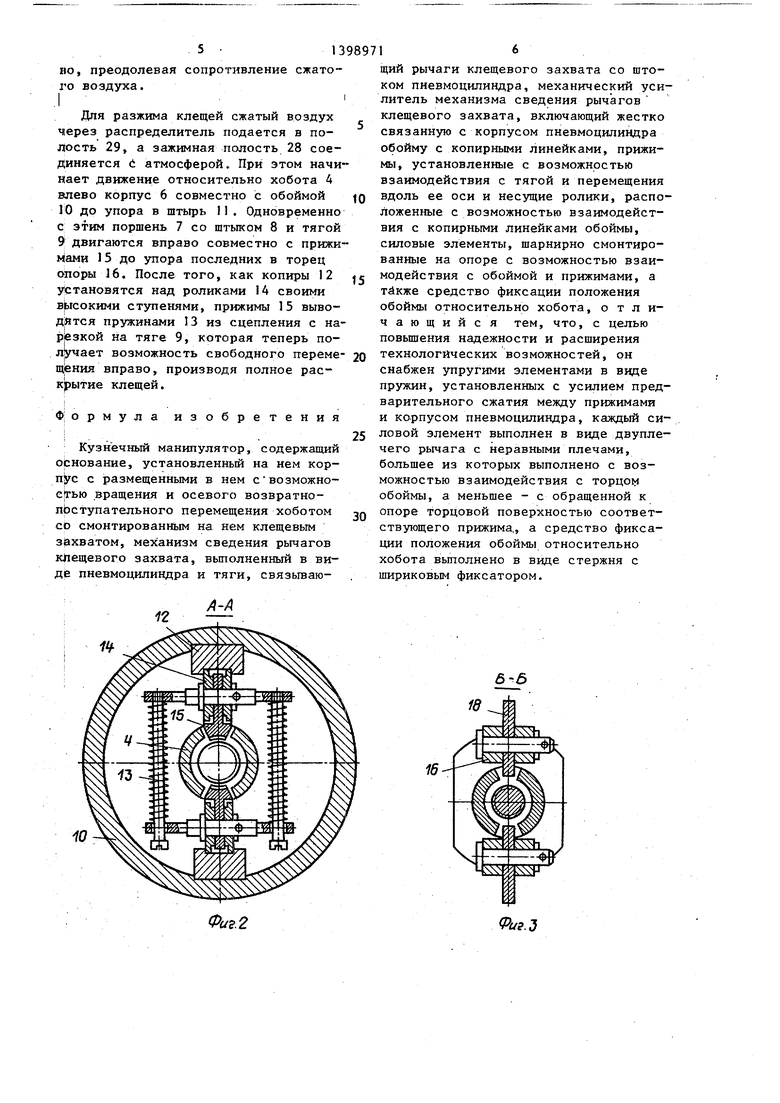
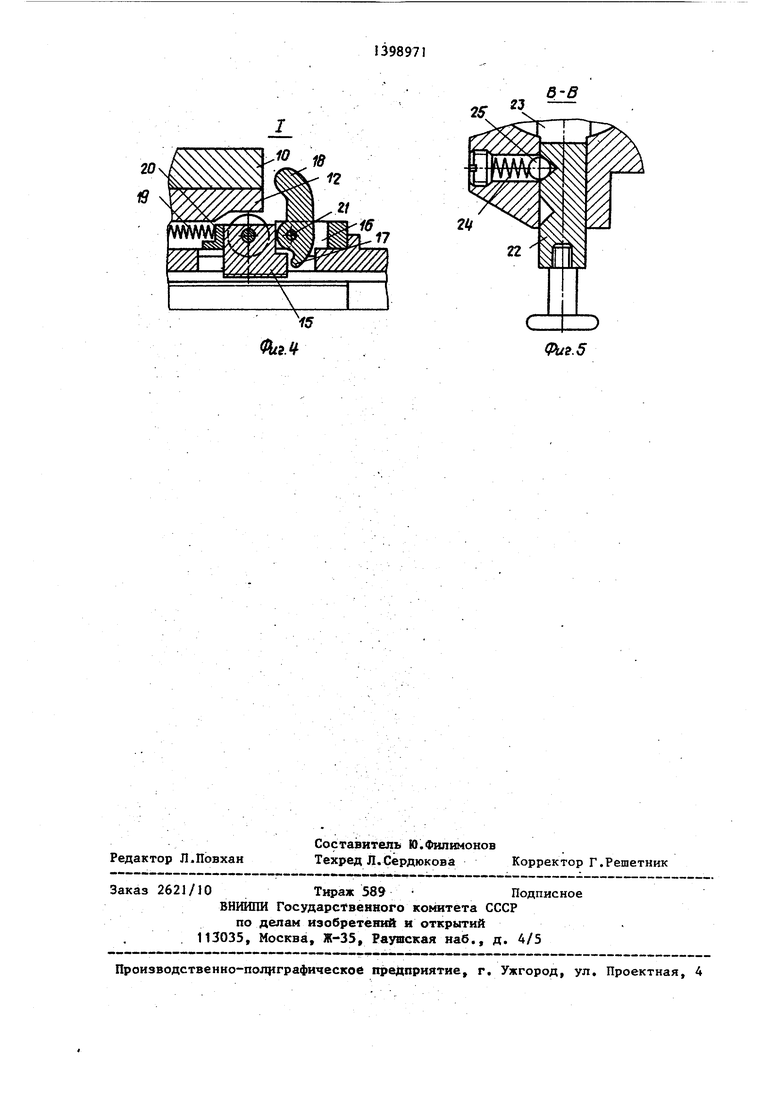
На фиг.1 изображен кузнечный манипулятор, общий вид; на фиг.2 - сечение А-А на фиг,1; на фнг.З - сечение Б-Б на фиг.1; на фиг.4 - узел I на фиг.1; на фиг.5 - сечение В-В на фиг.1.
Кузнечный манипулятор содержит Опору 1, на которой смонтирована стойка 2 с качающимся корпусом 3. В корпусе с возможностью вращения от- йосительно своей оси установлен хобот А, на одном конце которого смонтированы клещи 5, а на другом - прит Вод зажима клещей. Указанный привод выполнен в виде пневмоцилиндра, вклю чающего корпус 6, поршень 7 и шток 8 Шток 8 соединен с клещами 5 тягой 9. С корпусом 6 пневмоцилиндра жестко соединена обойма 10, установленная На хоботе 4 с возможностью осевого смещения в пределах, ограниченных Штырем 11, который закреплен на хоботе 4. В отверстии обоймы 10 закреплены копирные линейки 12, в которых выполнены пазы со ступенчатыми по- верхностями. В исходном положении к {верхним ступеням пазов копирных ли- Неек поджаты пружинами 13 посредством роликов 14 прижимы 15, проходящие сквозь вырезы, выполненные в хо- .боте 4. В зоне этих вырезов на тяге 9 вьтолнена нарезка, взаимодействующая с нарезкой, изготовленной на внутренней части прижимов 15. Указанные прижимы являются концевыми зве- ньями механического усилителя, силовые элементы которого вьтолнены в виде двуплечих рычагов, каждый из которых шарнирно установлен на опоре 16 с возможностью взаимодействия своим коротким плечом 17 с прижимом 15, а длинным 18 - с торцом обоймы 10.
Для настройки на автоматическое включение механического усилителя после сведения клещей предусмотрены предварительно сжатые пружины 19, которые установлены между торцовой стенкой корпуса пневмоцилиндра 6 и фланцем 20, упирающимся в торцы при
.
ю
5
0 5 30 c 0 jc
0
5
жимов 15. Степень предварительного сжатия пружин обеспечивает удержива-: ние корпуса пневмоцилиндра от смещения с усилием, превышающим силу, передающуюся от поршня 7 на тягу 9 для холостого сведения клещей. До включе- ния механического усилителя пружины 19, воздействуя на фланец.20, поджимают через него прижимы 15 к торцовой поверхности опоры 16. Данная поверхность является базой для точного ориентирования прижимов 15 относительно тяги 9 в исходном положении. От поперечного смещения прижимы 15 удерживаются стенками пазов в копирах 12, с которыми контактируют ролики 1 4 .
Нижние участки прижимов 15, взаимодействующие с плечами 17, удлинены и заходят под выступы опоры 16, в которых установлены оси 21 двуплечих рычагов. Это позволяет обеспечить максимально возможный рабочий ход коротких плечей 17 рычагов механического усилителя.
Для настройки устройства на работу в одном из двух режимов - с механическим усилителем или при его полном отключении - предусмотрено управляемое вручную средство фиксации положения обоймы относительно хобота в виде стержня-фиксатора 22. Указанный фиксатор смонтирован на ступице обоймы 1 О в зоне ее взаимодействия со штырем 11, выступающая часть которого размещена в продольном пазу 23. Фиксатор 22 установлен с возможно-; ., стью захода в этот паз в зазор между его левой (по чертежу) стенкой и штырем 11. Позиционирование фиксатора в положении, соответствующем одному из двух режимов, производится с помощью поджимаемого пружиной 24 шарика 25, заходящего в углубление на фиксаторе 22.
В основных губках клещевого захвата 5 смонтированы дополнительные губки 26 с возможностью их вращения вокруг оси, перпендикулярной оси хобота 4 с помощью привода 27.
Для управления пневмоцилиндром предусмотрен распорядитель (не показан) , с помощью которого сжатый воздух подается либо в зажимную полость 28, либо в отжимную 29. На задней стенке корпуса пневмоцилиндра 6 закреплены рукоятки 30.
Манипулятор работает следующим образом.
Для обработки удлиненных деталей производят настройку на режим работы с автоматическим включением механического усилителя. При этом фиксатор 22 выводится из паза 23. В исходном положении полость 28 пневмоцилиндра соединена с атмосферой, и корпус 6 совместно с обоймой 10 находится в крайнем левом (по чертеясу) положении, ограниченном штьфем П.
Оператор берется руками за рукоятки 30 и, воздействуя ими через корпус 6 и обойму 10 на хобот 4, подводит клещи 5 к обрабатьгоаемой заготовке. Затем через распределитель подается команда на подачу сжатого воздуха в зажимную полость 28. При этом поршень 7 со штоком 8 движется влево (по чертежу), увлекая тягу 9, которая сводит клещи 5, а корпус 6 удерживается от смещения вправо сжатыми пружинами 19. После соприкосновения клещей с поверхностью заготовки, когда выбраны зазоры в звеньях механизма, поршень 7 останавливается, и по
мере поступления сжатого воздуха в полость 28 давление в последней растет. После того, как сила от давления, действующего на торцовую стенку корпуса 6, превысит величину усилия, с которым предварительно сжаты пружи ны 19, корпус 6 совместно с обоймой 10 начинают движение вправо. Так выполняется переход от предварительного сведения клещей к силовому зажиму заготовки. В начальной стадии смещения обоймы 10 вправо копирные линейки 12 своими низкими ступенями воздействуют через ролики 14 на прижимы 15, смещая их по торцу опоры 16 до смыкания с нарезанным участком тяги 9. Одновременно с этим выбирается зазор между торцом обоймы 10 и рабочими поверхностями длинных плечей 18 рычагов механического усилителя. При дальнейшем движении боймы 10 вправо рычаги поворачиваются на осях 21, воздействуя короткими плечами 1.7 на торцы прижимов 15, смещая их совместно с тягой 9 влево. Этот процесс про
0
5
0
0
5
Рабочий ход прижимов 15 совместно с тягой 9, который происходит под воздействием двуплечих рычагов механического усилителя, обеспечивает натяг всех нагруженных звеньев устройства при любой величине их деформации и податливости разогретой заготовки. При этом выигрьш в силе за счет соотношения длин плеч 17 и 18 в процессе рабочего хода остается практически постоянным и обеспечивает надежный зажим деталей различной конфигурации.
При раскатке поковки в процессе ее вращения дополнительными губками 26, когда ее размер в поперечном сечении увеличивается, кшещи 5 расходятся. При этом тяга 9 смещается вправо, увлекая в ту же сторону прижимы 15, которые, действуя через плечи 17 и 18 рычагов, смещают обойму 10 совместно с корпусом 6 относительно хобота 4 влево. В этом случае пе- 5 ремещающиеся элементы привода испытывают лишь сопротивление податливой среды - сжатого воздуха. Поскольку при раскатке поковки обработку заготовки производят с различных сторон,: клещи периодически раскрьшают для перехвата детали. Благодаря этому при каждом новом цикле зажима элементы, механического усилителя вновь устанавливаются в положение, которое обеспечивает податливость захвата на принудительное раскрытие клещей.
Режим полного отключения механического усилителя.
Если необходимо обеспечить вьтол- нение таких операций откова, когда расширение заготовки до ее следукице- го перехвата превышает величину податливости клещей на раскрытие, фиксатор 22 вводится в паз 23. В этом случае зажимное усилие клещевого захвата создается пневмоцилиндром без механического усилителя.
При откове неудлиненных заготовок этого усилия достаточно, поскольку на клещевой захват нагрузка от силы тяжести заготовки действует в зоне губок, не создавая момента. С другой стороны уменьшение зажимного усилия улучшает условия работы механизма
0
5
0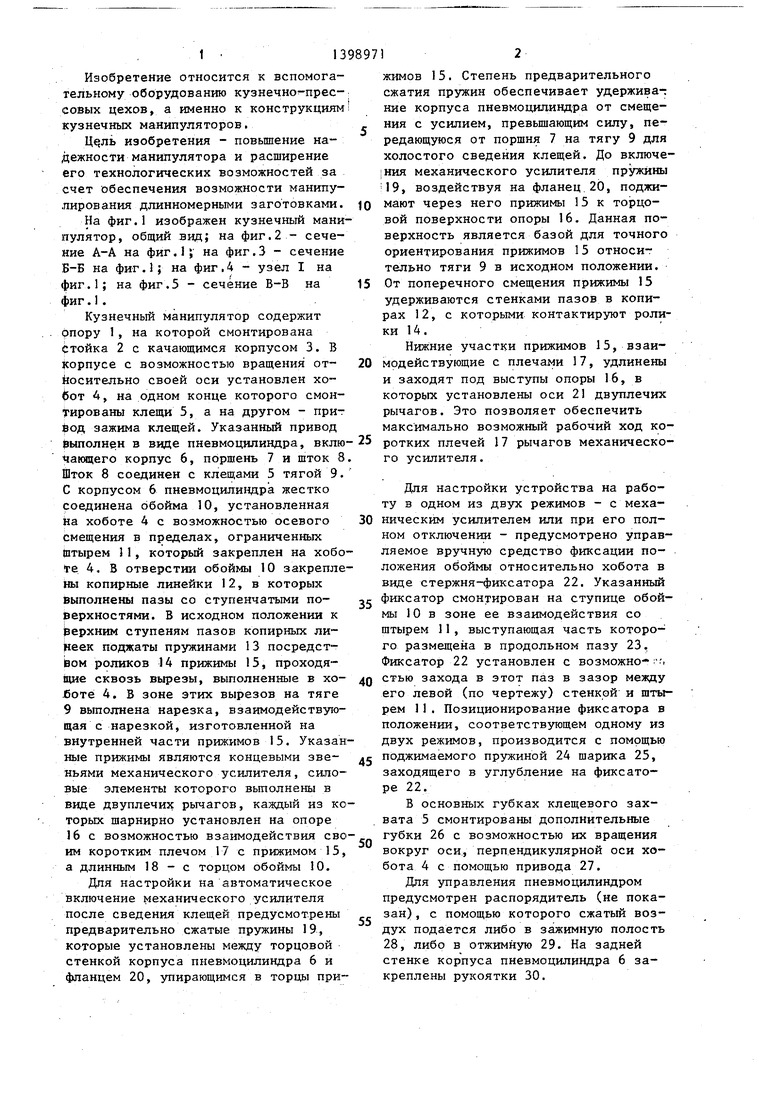
| название | год | авторы | номер документа |
|---|---|---|---|
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Клещевая головка ковочного манипулятора | 1982 |
|
SU1055583A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Хобот кузнечного манипулятора | 1986 |
|
SU1393523A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
| Манипулятор | 1982 |
|
SU1018774A1 |
Изобретение относится к вспомогательному оборудованию кузнечно- прессовых цехбв, а именно к конструкциям кузнечных манипуляторов. Цель - повьппение надежности манипулятора и расширение его технологических воз- можностей за счет обеспечения возможности манипулирования длинномерными заготовками. Кузнечный манипулятор содержит корпус 3, на котором размещен с возможностью вращения и возвратно-поступательного перемещения хобот 4, на одном конце которого смонтированы клещи 5, а на другом VJLJJ X 1в ,11 да f5 ftf./ привод зажима клещей. Привод выполнен в виде пневмоцилиндра. Манипулятор снабжен механическим усилителем. Силовые элементы вьтолнены в виде двуплечих рычагов, смонтированшлх с возможностью взаимодействия СБОЯМИ большими плечами 18 с торцом обоймы, а меньшими - с торцами прижимов 15, установленных с возможностью ориентирования на торцовой части опоры 16. Мезвду прижимами 15 и корпусом 6 установлены предварительно сжатые пружины 19, обеспечиванядие настройку на автоматическое включение механического усилителя после холостого сведения клещей. Устройство имеет управляемый фиксатор 22 с возможностью полного отключения механического усилителя. После захвата заготовки усилие от поршня пневмоцилиндра суммируется с усилием от механического усилителя. Надежность работы последнего повьш1ается за счет упрощения элементов его автоматического включения после холостого сведения клещей и увеличения рабочего хода силовых элементов. 5 ил. ё 00 со 00 со Ч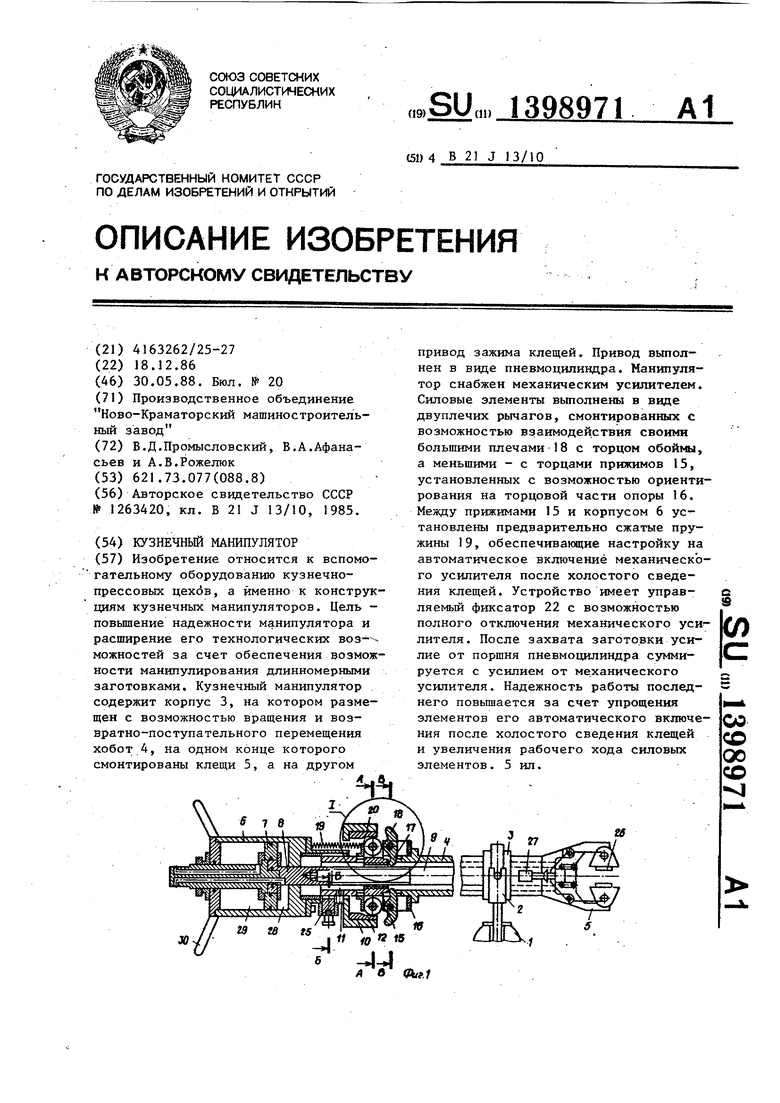
исходит при возросшем давлении сжато- 55 вращения дополнительных губок 26. В го воздуха в полости 28, когда на тя- процессе раскатки заготовки, когда ГУ 9. действует максимальное усилие .ее размер в поперечном сечении увели- от поршня 7, которое суммируется с чивается, клещи 5 расходятся, смещая усилием от механического усилителя. тягу 9 и вместе с ней поршень 7 влеА-А
п
Фиг2
6-6
ю
16
(Риг.З
l.ff
В В
Фиъ.5
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
