Изоб:ретен.ие относится ,к области металлур1гии, 3 частности IK оборудованию для производства, -HaTipiHiMep, металлического порошка.
Известна автоматическая линия для выбив.к} металлической губки из стакана, 3 ключающая стол, штанго-вый трайснортер, сталкизатель, пневмо молот, ленточ,-ный транспортер и выходной рольганг I.
Недостатком И31вестной линии является тю, что она оборудована двумя ,ка} тователями, что усложняет конструкциЕО. Кроме того, кривошипные кннтователи не обеспечивают разно.мерной скорости кантования стаканов, а возникающие при этом динамические нагруз|К|И привюдят к преждбвре.менО;.му выходу из строя деталей лИВИ;И.
Наличие больших уравновешивающих Прузов, которы.ми снабжены 1ка.нтоБатели, затрудняет эксплуатацию линии.
Стакан при работе пневмомолота фиксируется на столе выби-вми дву.мя нневмоцилж-iдрам,и, котррые воонрмнимают дишам.ические нагрузки И быстро выходят из строя.
Целью изобретения является создание конструкции а1втаматической линии, обеспечивающей увеличение ироиз водительности при выбивке Металлической губк-и из CTaixaiiOB, а также иавыщение ее экоплуатациоиной надежности и долговечности.
Это достигается тем, что предлагаемая линия снабжена карусельным .манипулятором, выполненным з виде поворотного вокруг вертикальной оси диска с горизонтально установленными на нем в подшипниках зажимами для стаканов, приводимыми через планетарную зубчатую, передачу при повороте Д)1ска во вращательное движение вокруг собственной оси с одновременныМ ,круговым неремещением в горизонтальной нлоакости. Та.кая конструкция манипулятора позволяет устранить динамические нагрузки и -повысить надежность и долговечность линии, так как кантование ста;кана производится вокруг его
центра тяжести. При этом отпадает необходимость 3 применении уравнозешизаюп;их грузов.
Наличие з столе выбивки О1кна с кольцевым гнездам позволяет фиксиро,вать стакан
при работе пневмомолота без 1риме1нен)я фиксирующих пневмоцилиндров.
Кроме того, линия снабжена съемником стаканов, выполненным в виде подвижной з верти.кальном напразлении каретки с sa.xiBaтам,и, соединенной с противовесом, имеющей в верх,ней части поворотный захват, связанный через щарнир,ное звено со щтоком ннезмопривода. Такое выполнение съемника позволяет точно установить стакан в кольцевое
гнездо стола выбивки.
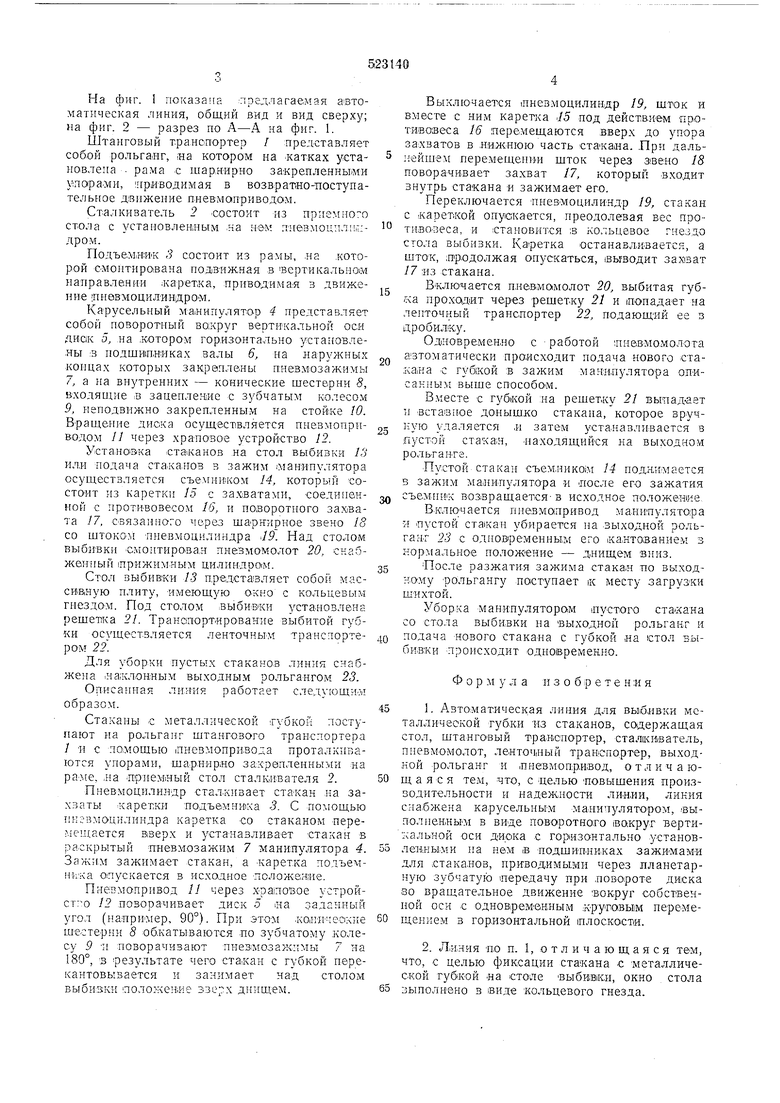
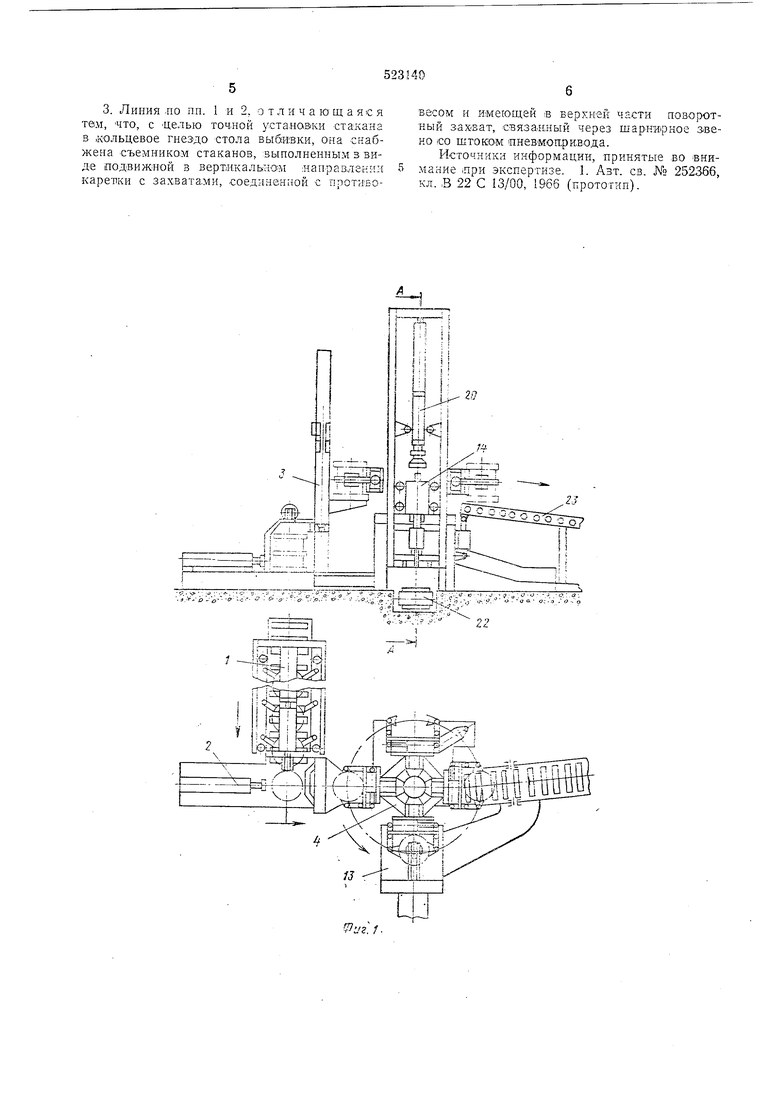
На фиг. показана предлагаемая автоматическая лршия, общий вид и вид сверху; на фиг. 2 - разрез по А-А на фиг. 1.
Штаиговый транопОртер / представляет собой рольганг, на котором на Катках установлена . рама € шарлирно закрепленными упара-ми, приводимая в возврат.но-т1оступательпое движение пневмоприводом.
Сталкиватель . состоит из прием ного стола с установлеилым .на н&к Лпевмоц11Л |Т:дром.
ПодъеМ|Н:ИК 3 состоит из рамы, ла которой смонтирована подвижная в вертикальисм направлении ,ка, приводимая з движение :ПневмоциЛИндром.
Карусельный ма|Нипулятор 4 представляет собой поворотный во;круг вертикальной оси диск 5, на .котором горизонтально установлены :в подшипниках валы 6, на наружных концах которых закреплены пневмозажимы 7, а на внутренних - конические шестерни 8, входящие :В зацепление с зубчатым колесом 9, неподвижно закрепленным на стойке 10. Врапдение диска осуществляется пневмоприводом 11 через храповое устройство 12.
Установка стаасанов на стол выбивки 13 или подача ста.канов в зажим .манипу.Еятора осуществляется съемниччом 14, который состоит нз каретки 15 с захватами, соедиибнной с противовесом 16, и поворотного захвата 17, связанного через шарнирное звено 18 со щтокам пневмоцилиндра 19. Над столом выбивки .монтировал пневмомолот 20, снабженный прижимным цилиндросм.
Стол выбив:ки 13 п.реаставляет собой массиВ|Ную плиту, имеющую окно с кольцевым гнездОМ. Под столом выбивки установлена решет1ка 21. Транопортировакие выбитой губки осуществляется ленточныл тралснортером 22.
Для уборки пустых стаканов линия снабжена |На;клон«ым выходным рольгангом 23.
Описанная линия работает следующи-м образом.
Стаканы с металлической губкой поступают на рольганг штангового транспортера / и с nOiMOfflbto (Пневмопривода протал;а1ваются упорами, шарнир.но за:Крепленными на , ла приемный стол сталкйвателя 2.
Пневмоцилиндр стал.кнвает на захваты каретки нодъвмни1ла 3. С пo ioщью пнгвмоцнлиндра каретка со стаканом пере euxaeтcя вверх и усталавливает стакан в раскрытый пневмозажим 7 манилулятора 4. Зажим зажимает стакан, а .каретка подъемника отпускается в исходное -положение.
Пневмопривод // через храповое устройство 12 поворачивает диск 5 «а заданный угол (налример, 90°). При этом .ко кичеокне Ше.сте.рни 8 обкатываются .по зубчатому .колесу 9 И поворачивают плевмозажлмы 7 на 180°, ;в результате чего ста,кан с губкой перекантовывается 1 занимает над столом выбивки поло лен;ие ззерх днищем.
Выключается пневмоцилиндр 19, щток н вместе с ним каретка J5 под действием противовеса 16 перемещаются вверх до упора за:хватов в .нижнюю часть стакана. .При даль5 лейшем перемещении щток через 18 поворачивает захват 17, который входит внутрь стакана и зажимает его.
Переключается инев-моцилиндр 19, стакан с карет.кой опускается, преодолевая вес противовеса, и становится s кольцево.е гнездо стола выбивки. 1 а ретка останавдивается, а шток, яродолжая опускаться, выводит захват 17 из стакана.
Включается п.неБмамолот 20, выбитая губка проходит через решетку 21 и попадает на ленточный транспортер 22, подающий ее в дробилку.
Одновременно с работой ;пне.вмо..мо.лота - агзтоматически происходит подача нового стакагна .с губкой ;в зажим манипулятора описанным выще способом.
Вместе с губкой ла решет.ку 21 выиад-ает
и вставное донышко стакана, которое вручную удаляется и затем устанавливается в
.пустой стака;н, .находящийся на выходном
рольганге.
.Пустой стакан съем.нико:м 14 поднимается
5 зажим манипулятора и лосле его зажатия
Q съемник возвращается-в исходное положение
Включается пневмапривод ма.нипулятора и пустой ста1кан убирается на выходной рольганг 23 с одновременным его 1ка:Нтованием в нормальное положение - днищем вниз. 5После разжатия зажима стакан по выходному рольгангу п0 ступает к месту загрузки шихтой.
Уборка манинулятором пустого стаскана со стола выбивки на выходной рольганг и 0 подача нового стакана с губкой на стол выбивки происходит одновременно.
Форм у л а и 3 о б :р е т е н ;и я
51. Авто:матическ.ая линия для вы;бивки метадлической губ.ки из стаканов, содержащая стол, штанговый транслортер, .стал1кИ|Ватель, пневмомолот, ленточный транспо.ртер, выходной рольганг и .пневмопривод, отличаю0 щ а я с я тем, что, с щелью повышения произзодительности и надежности линии, линия сна.бжена карусельны-м манипулятором, .выполиен.нЫМ в виде поворотного iBOKpyr вертикальной оси диска с гор изонтально установленными на нем в подшипниках зажимами для стака.нов, приводимыми через планетарную зубчатую передачу при новороте диска -во вращательное движение вокруг собственной оси .с одновр.ембнлым .кругавым переме0 щением в гор.изонтальной плоскости.
2. Линия по п. 1, о т л и ч а ю щ а я с я тем, что, с целью фиксации стакана с металличес.кой губкой на столе выбивки, окно стола 65 выполнено в 1виде кольцевого гнезда. 3. Линия ,по пп. 1 и 2, отличающаяся тем, что, с щелью точной уста,нав1ки стакана в .кольцевое гнездо стола выбивки, она снабжена съемникам стаканов, вынолненным в виде подвижной в верти,калыю.М наиравленни5 карепки с захвата,ми, соединенной с протиЕС весом и имеющей в верхней части поворотный захват, связанный через шарнирное эвено со штоко-м пневмоп.ри.вода. Источники информации, принятые во внимание 1Нри экспертизе. 1. Азт. св. № 252366, кл. ,В 22 С 13/00, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ВЫБИВКИ ЖЕЛЕЗНОЙ ГУБКИ ИЗ СТАКАНОВ И ЕЕ ДРОБЛЕНИЯ | 1969 |
|
SU252366A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Карусельный манипулятор | 1980 |
|
SU903050A1 |
| Самоцентрирующий патрон | 1985 |
|
SU1282973A1 |
| Устройство для демонтажа футеровки алюминиевых электролизеров | 1981 |
|
SU1011736A1 |
| Установка для нанесения покрытия на изделия | 1988 |
|
SU1597226A1 |
| Устройство для выбивки литейных форм | 1979 |
|
SU863173A1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
2J
y-jz.l.
