(54) ЗАХВАТ КУЗНЕЧНОГО МАНИГГУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Инструментальный манипулятор | 1984 |
|
SU1202684A1 |
| КЛЕЩИ ДЛЯ КОВОЧНОГО МАНИПУЛЯТОРАLL „LfiJi. I.. .л Т- г.л:;;т.:з --^l т:::;::-м:с::.'пBi'iJA'^j'i JJ'xA I | 1965 |
|
SU173104A1 |
| Кузнечный манипулятор | 1961 |
|
SU142503A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
1
Изобретение относится к вспо.могательному оборудованию кузнечно-прессовых цехов и может быть использовано при проектировании кузнечных манипуляторов.
Известен захват кузнечного манипулятора, содержащий поворотный хобот, две пары приводных поворотных рычагов с губками, расположенных в двух перпендикулярных плоскостях, одна из которых размещена с возможностью захвата обрабатываемой поковки по ее торцовым поверхностям, а другая по ее боковым поверхностям, и привод поворота обрабатываемой поковки в виде каретки с подпружиненным и приводным поворотны.м роликом 1.
Недостатком известного кузнечного захвата манипулятора является невысокая его производительность работы при обработке поковок типа дисков из-за невоз.можности обработки поковки по ее боковым поверхностям.
Цель изобретения - повыщение производительности работы захвата при обработке поковок типа дисков.
Цель достигается тем, что в захвате кузнечного манипулятора, содержащем поворотный хобот, две . пары приводных
поворотных рычагов с гуока.ми, расположенных в двух перпендикулярных плоскостях, одна из которых размеп1ена с возможностью захвата обрабатываемой поковки по ее торцовым поверхностям, а другая - по ее боковы.м поверхностям, и механизм поворота обрабатываемой поковки в виде каретки с подпружиненным п приводным поворотным ро.чиком, каретка приходного поворотного ролика CMoirnipoiunia вдоль оси хобота, выполнена ноднижной
10 и снабжена пршкхдом перемепления в паправлепии оси обрабатываемой поковки, при этом губкп. расположенные на pi.maiax, зажимающих поковку по торцовы.м ее поверхностям, выполнены в виде поворотных центров, сов.мещенных с осью обрабатывае15мой поковки.
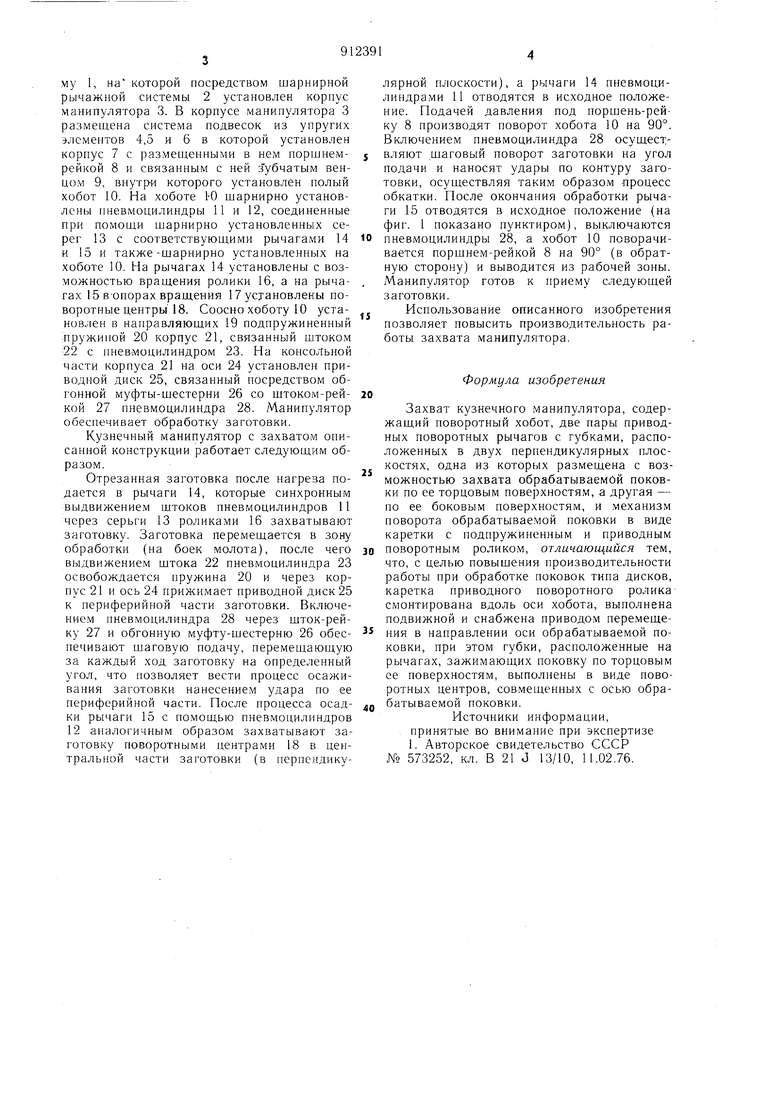
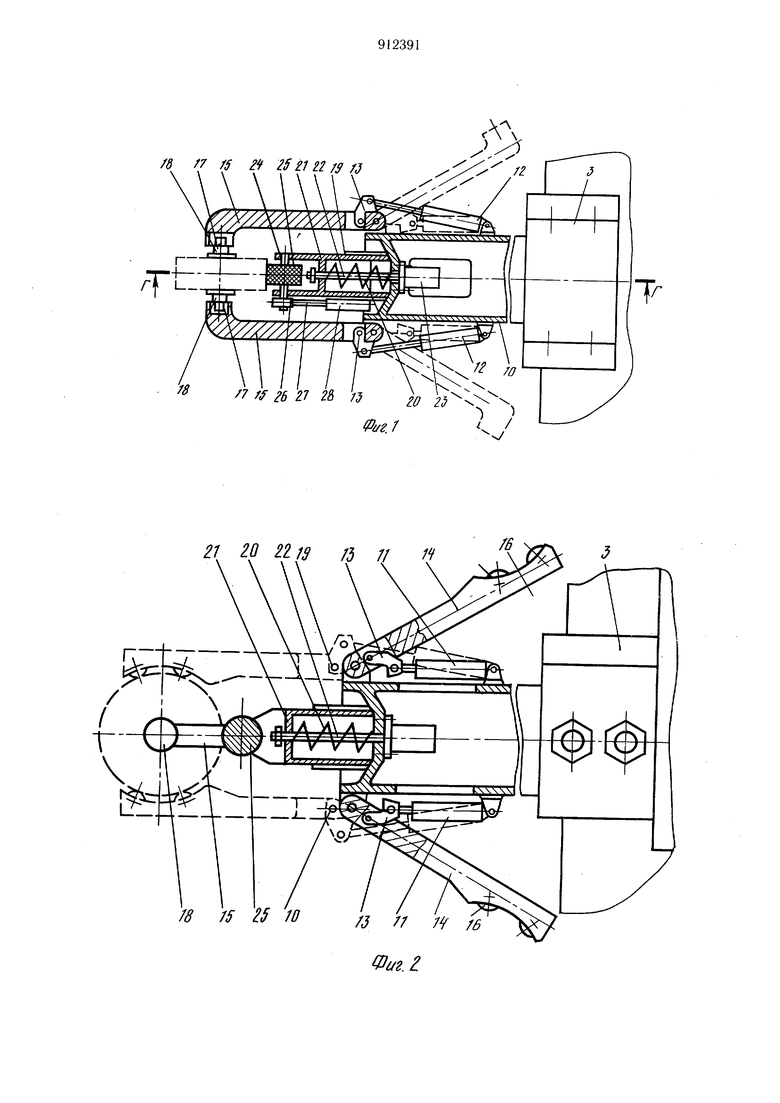
На фиг. 1 изображен захват к знечного манипулятора, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - манипулятор с захватом, o6nuni вид; на фиг. 4 - сече20ние .А-А на фиг. 3; на фиг. 5 -- сечегще Б - Б на фиг. 3; на фиг. 6 - вид В на фиг. 5.
Захват устанавливается на кузнечный манипулятор, содержащий подвижную раму 1, на которой посредством шарнирной рычажной системы 2 установлен корнус манипулятора 3. В корпусе манипулятора 3 размещена система подвесок из упругих элементов 4,5 и 6 в которой установлен корпус 7 с размепденными в нем поршнемрейкой 8 и связанным с ней зубчатым венцом 9, внутри которого установлен полый хобот 10. На хоботе 1-0 шарнирно установлены пневмоцилиндры 11 и 12, соединенные при помощи щарнирно установленных серег 13 с соответствующими рычагами 14 и 15 и также-шарнирно установленных на хоботе 10. На рычагах 14 установлены с возможностью вращения ролики 16, а на рычагах 15 вопорах вращения 17 установлены поворотные центры18. Сооснохоботу 10 установлен в направляющих 19 подпружиненный пружиной 20 корпус 21, связанный штоком 22 с пневмоцилиндром 23. На консольной части корпуса 21 на оси 24 установлен приводной диск 25, связанный посредством обгонной муфты-шестерни 26 со щтоком-рейкой 27 пневмоцилиндра 28. Манипулятор обеспечивает обработку заготовки.
Кузнечный манипулятор с захватом описанной конструкции работает следующим образом.
Отрезанная заготовка после нагреза подается в рычаги 14, которые синхронным выдвижением щтоков пневмоцилиндров 11 через серьги 13 роликами 16 захватывают заготовку. Заготовка перемещается в зону обработки (на боек молота), после чего выдвижением щтока 22 пневмоцилиндра 23 освобождается пружина 20 и через корпус 21 п ось 24 прижимает приводной диск 25 к периферийной части заготовки. Включением пневмоцилиндра 28 через шток-рейку 27 и обгонную муфту-шестерню 26 обеспечивают шаговую подачу, перемещающую за каждый ход заготовку на определенный угол, что позволяет вести процесс осаживания заготовки нанесением удара по ее периферийной части. После процесса осадки рычаги 15 с помощью пневмоцилиндров 12 аналогичным образом захватывают заготовку поворотными центрами 18 в центральной части заготовки (в перпендикулярной плоскости), а рычаги 14 пневмоцилиндрами 11 отводятся в исходное положение. Подачей давления под порщень-рейку 8 производят поворот хобота 10 на 90°. Включением пневмоцилиндра 28 осуществляют щаговый поворот заготовки на угол подачи и наносят удары по контуру заготовки, осуществляя таким образом -процесс обкатки. После окончания обработки рычаги 15 отводятся в исходное положение (на фиг. 1 показано пунктиром), выключаются
пневмоцилиндры 28, а хобот 10 поворачивается поршнем-рейкой 8 на 90° (в обратную сторону) и выводится из рабочей зоны. Манипулятор готов к приему следуюшей заготовки.
Использование описанного изобретения позволяет повысить производительность работы захвата манипулятора.
Формула изобретения
Захват кузнечного манипулятора, содержащий поворотный хобот, две пары приводных поворотных рычагов с губками, расположенных в двух перпендикулярных плоскостях, одна из которых размещена с возможностью захвата обрабатываемой поковки по ее торцовым поверхностям, а другая - по ее боковым поверхностям, и механизм поворота обрабатываемой поковки в виде каретки с подпружиненным и приводным
поворотным роликом, отличающийся тем, что, с целью повышения производительности работы при обработке поковок типа дисков, каретка приводного поворотного ролика смонтирована вдоль оси хобота, выполнена подвижной и снабжена приводо.м перемещения в направлении оси обрабатываемой поковки, при этом губки, расположенные на рычагах, зажимающих поковку по торцовым ее поверхностям, выполнены в виде поворотных центров, сов.мещенных с осью обрабатываемой поковки.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 573252, кл. В 21 J 13/10, 11.02.76. // // If 15 1П /3 fd /7 // 6 27 г& 2 21 го 22 fS /J // /8 15 5 10 Ф1/г.Г
Фиг. г J /
