(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1331638A1 |
| Манипулятор | 1979 |
|
SU891428A1 |
| Загрузочное устройство | 1982 |
|
SU1024223A2 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| Многооперационное устройство сАВТОМАТичЕСКОй СМЕНОй иНСТРуМЕНТА | 1978 |
|
SU831487A1 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| Загрузочное устройство | 1980 |
|
SU944869A1 |
| Автооператор | 1980 |
|
SU891328A1 |
| Компенсационное электроизмерительное устройство | 1956 |
|
SU109916A1 |
| Поточная линия для штамповки крупногабаритных листовых заготовок | 1991 |
|
SU1834813A3 |
Изобретение относится к машиностроению в частности к манипуляторам на каретках, движушихся вдоль направляющих.
Известен манипулятор, содержащий узел координатных перемещений, например подвго ную каретку с захватом, траверсу с жестки .мн упорами, выдвижной упор и узел торможения.
С целью упрощения конструкции и повышения производительности предлагаемого манипулятора его каретка снабжена щупом, электрически связанным с выдвижным упором, выполненным предпочтительно в виде подпружиненной с возможностью поворота и осевого перемещения втулки с кулачковой поверхностью, причем узел торможения кинематически связан с указанной втулкой.
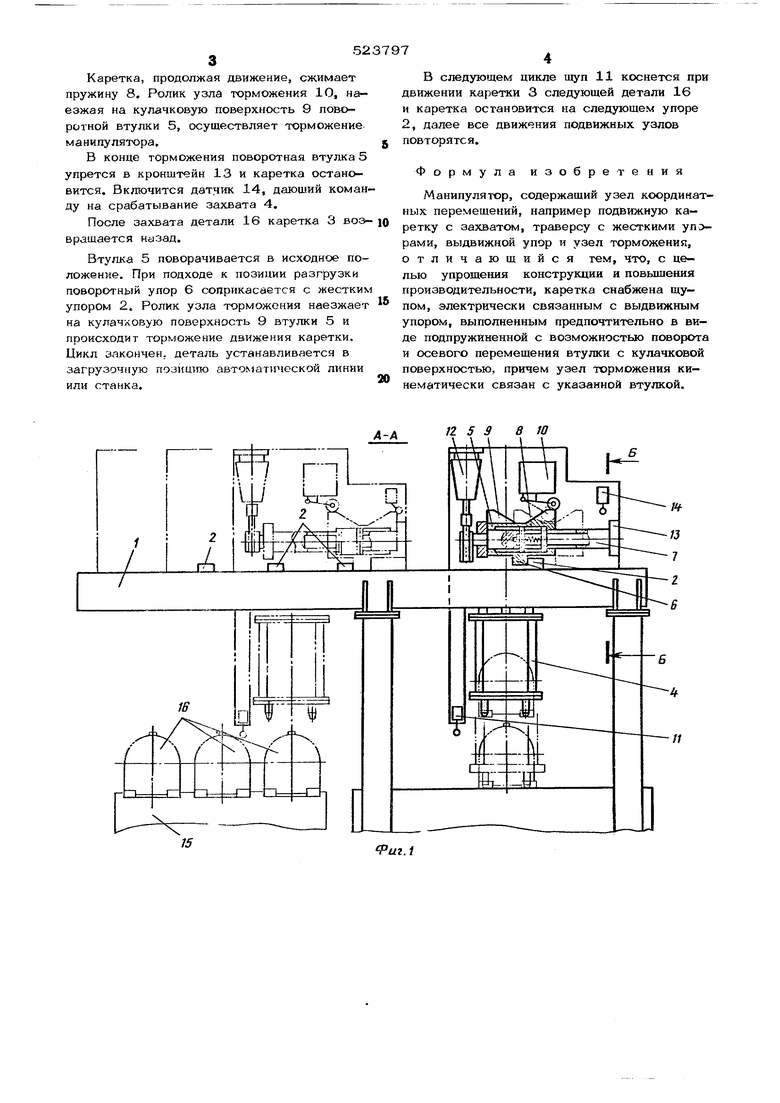
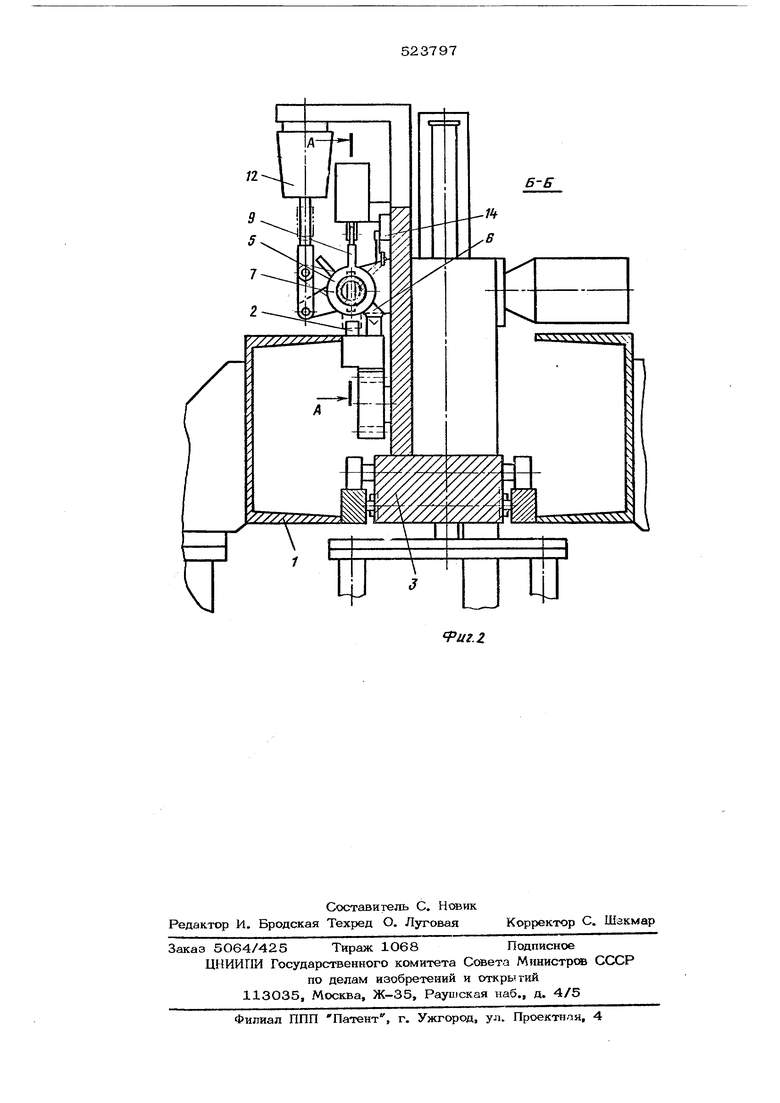
На фиг. 1 показано предлагаемое устройство (разрез по А-А на фиг,2); на фиг, 2 - разрез по Б-Б на фиг. 1,
Манипулятор состоит из траверсы 1 с жесткими упорами 2, по которой перемещается каретка 3 с захватами 4, снабженная выдвижным упором, выполненным в виде кулачковой поворотной втулки 5 с упорным
выступом 6, установленной на валу 7, подпружиненной пружиной 8 вдоль оси и взаимодействующей кулачковой поверхностью 9 с узлом тсрможения 10.
Каретка снабжена щупом 11 связанным электрически с упорным выступом 6 посредством привода поворота 12 псжоротной втулки 5 и кронщтейном 13, в который упирает ся поворотная втулка 5 в конае пути торможения.
На каретке 3 размещен датчик 14 выхода на позиции. В магазине 15 - детали 16.
Манипулятор работает следующим образом.
С подачей команды на работу манипулятора каретка 3 идет в сторону магазина 15 деталей. При этом щуп 11 по ходу движения касается первой детали 16 и дает сит налы на включение привода псжорота 12 втулки 5, которая, поворачиьаясь, ставит упорный выступ в нижнее положение.
При дальнейщем движении каретки упорный выступ 6 соприкасается с жестким упором 2 траверсы 1. Каретка, продолжая движение, сжимает пружину 8. Ролик узла торможения 10, наезжая на кулачковую поверхность 9 поворотной втулки 5, осуществляет торможение манипулятора, В конце торможения поворотная втулка 5 упрется в кронштейн 13 и каретка остановится. Включится 14, даюший коман ду на срабатывание захвата 4. После захвата детали 16 каретка 3 воэ- вращается назад. Втулка 5 поворачивается в исходное положение. При подходе к позиции разгрузки поворотный упор 6 соприкасается с жестким упором 2. Ролик узла торможения наезжает на кулачковую поверхность 9 втулки 5 и происходит торможение движения каретки. Цикл закончен, деталь устанавливается в загрузочную noaimvno автоматической линии или станка. В следующем цикле щуп 11 коснется при движении каретки 3 следующей детали 16 и каретка остановится на следующем упоре 2, далее все движения подвижных узлов повторятся. Формула изобретения Манипулятор, содержащий узел координатных перемещений, например подвижную каретку с захватом, траверсу с жесткими упорами, выдвижной упор и узел торможения, отличающийся тем, что, с целью упрожения конструкции и повьипения производительности, каретка снабжена щупом, электрически связанным с выдвижным упором, выполненным предпочтительно в виде подпружиненной с возможностью поворота и осевого перемещения втулки с кулачковой поверхностью, причем узел торможения кинематически связан с указанной втулкой.
/2
fuz.Z
