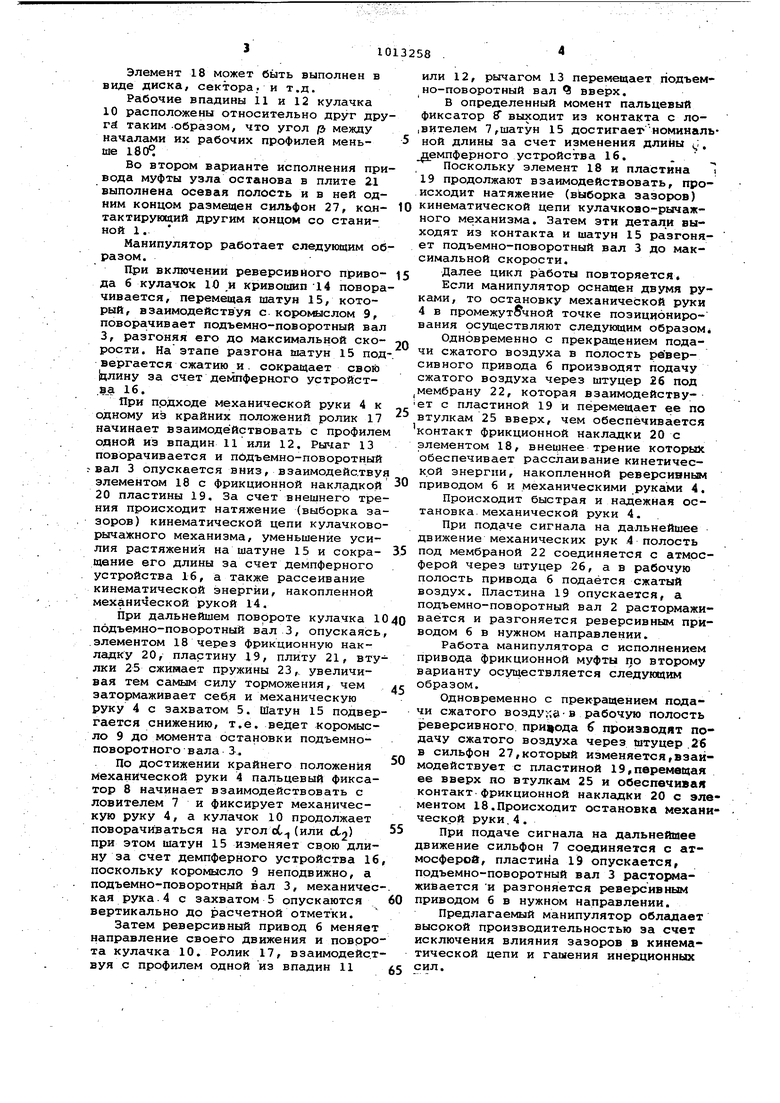
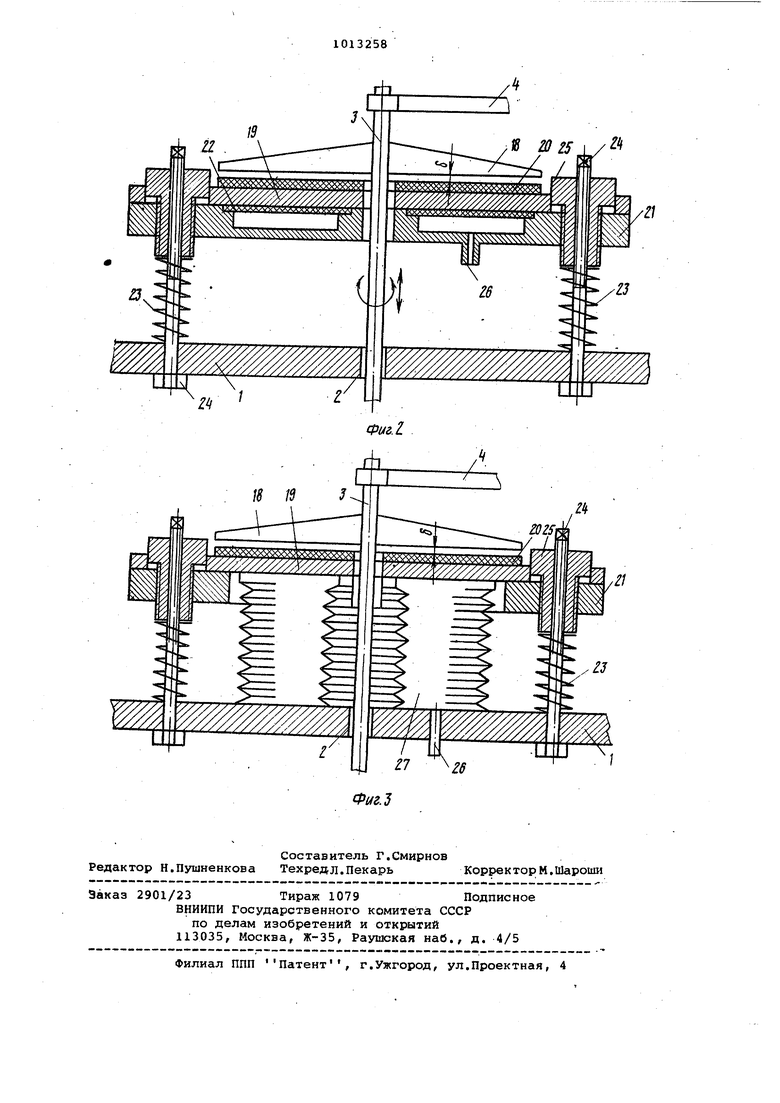
Изобретение относится к области обработки металлов давлением, в час ности к падакнарм и удаляющим устрой ствам, и может быть использовано дл подачи в штамп штучных листовых заг тонок и удаления из штампа готовых деталей и отходов. По основному авт. св. 774940 известен манипулятор, содержащий смонтированный на станине подъемноповоротный вал с механической рукой кулачково-рычажные механизмы подъема и поворота с реверсивным приводо ловители, коромысло с фиксатором, шарнирно, связанным с шатуном кулачково-рычажного механизма и смонтиро ванным на этом шатуне демпферным ус ройством, кинематически связанным ,Ь коромыслом 1. Недостатком известного манипулятора является невысокая произвЬдительность из-за возникновения значительных инерционных сил при разго не и торможении и наличия зазоров в кинематической цепи. Целью изобретения является повышение производительности путем исклю чения влияния зазоров в кинематической цепи и гашения инерционных сил. Для достижения этой цели манипуля тор-, содержащий смонтированный на станине подъемно-поворотный вал с ме ханической рукой, кулачково-рычажные механизмы подъема и поворота с ревер- сивным приводом, ловители, коромысло с фиксатором, шарнирно. связанным с шатуном кулачково-рычажного механизма поворота и смонтированным на этом шатуне демпферным устройством, кинематически связанным с коромыслом, снабжен узлом останова, выполненным в виде оснащенной приводом фрикционной муфты, один из элементов которой жестко закреплен на подъемно-поворот ном валу, а другой выполнен в виде пластины, установленной с возможностью возвратно-поступательного перемещения в направлении оси, подъемно-поворотного вала и снабжен фрикционной накладкой, а привод муфты, выполнен в виде подпружиненной, установленной на станине, плиты с полостью, связанной с источником подачи сжатого воздуха и оснащенной сред ствами регметизации, полость выполне на в виде кольцевого паза, и средств герметизации - в виде установленной в нем герметизирующей мембраны или полость выполнена по оси плиты, а средства герметизации - в виде сильфона, одним концом размещенного в полости и контактирующего другим концом со станиной. На фиг. 1 изображена кинематическая схема манипулятора (механическая рука опущена в крайнее нижнее положение)) на фиг. 2 - узел останова, продольный разрез, первый вариант; на фиг, 3 - то же, второй вариант. Манипулятор содержит станину 1, смонтированный на ней в подшипниках 2 подъемно-поворотный вал 3 с механической рукой 4, снабженной захватом 5, реверсивный привод б кулачково-рычажного механизма, ловитель 7, пальцевый фиксатор 8, соединенный с одним плечом коромысла 9, шарнирно связанного с подъемно-ловоротным валом 3. Кулачково-рычажный механизм выполнен в виде кулачка 10, жестко закрепленного на выходном валу реверсивного привода 6 и имеющего два рабочих паза 11 и 12, двуплечего рычага 13, кривошипа 14, шатуна 15 с демпферным устройством 1б. Двуплечий рычаг 13 шарнирно соединен с подъемно-поворотным валом 3, и другим плечом - с роликом 17, взаимодействующим с профилем кулачка 10. 15 шарнирно соединен с коромыслом 9, а демпферное устройство 16 предназначено для изменения длины шатуна 15 при повороте кулачка 10.на уг-ол, превышающий 180 .Ловители 7, жестко закрепленные на станине 1, имеют заходную фаску и предназначены для фиксации механической руки 4 в крайних положениях, соответствующих повороту кривошипа 14 на причем контакт пальцевого фиксатора 8 с ловителями 7 обеспечивается в фазах углов di и d-y поворота кривошипа 14, т.е. (.+oLy, где о(/ - угол поворота реверсивного привода б. Узел останова выполнен в виде фрикционной муфты с приводом. Фрикционная муфта содержит элемент 18, жестко закрепленный на подъемно-поворотном валу 3, пластину 19, установленную с возможностью возвратно-поступательного перемещения в направлении оси подъемно-поворотного вала б и снабженную фрикционной накладкой 20. Привод муфты узла останова (первый вариант) содержит подпружиненную, установленную на станине 1, плиту 21 с полостью в виде кольцевого паза и установленную в нем герметизирующую ембрану 22. Плита 21 установлена на пружинах 23 посредством регулировочных винтов 24 и втулок 25. Регулироочные винты 24 предназначены для оганичения хода плиты 2tf исключения оворота ее относительно станины 1 обеспечивают регулировку зазора сГ (не более 1-2 мм) между элементом 18 фрикционной накладкой 20. Полость, бразованная пазом плиты 21 и мембраой 22, снабжена штуцером 26 с источиком подачи сжатого воздуха (или идкости). Мембрана 24 может быть выполнена, апример, из резины. Элемент 18 может быть выполнен в виде диска, сектора- и т.д. Рабочие впадины 11 и 12 кулачка 10 расположены относительно друг дру га таким -образом, что угол /э между началами их рабочих профилей меньше 180° Во втором варианте исполнения при вода муфты узла останова в плите 21 выполнена осевая полость и в ней одним концом размещен сильфон 27, контактирующий другим концом со станиной 1. Манипулятор работает следующим об разом. При включении реверсивного привода 6 кулачок 10 и кривопюп 14 повора чивается, перемещая шатун 15, который, взаимодействуя с коромыслом 9, поворачивает подъемно-поворотный вал 3, разгоняя его до максимальной скорости. На этапе разгона шатун 15 под вергается сжатию и. сокращает свою 1цлину за счет демпферного устройст.ва 16. При подходе механической руки 4 к одному из крайних положений ролик 17 начинает взаимодействовать с профилем одной из впадин 11 или 12. Рычаг 13 поворачивается и подъемно-поворотный вал 3 опускается вниз, взаимодейству элементом 18 с фрикционной накладкой 20 пластины 19. За счет внешнего тре ния происходит натяжение (выборка за зоров) кинематической цепи кулачково рычажного механизма, уменьшение усилия растяжения на шатуне 15 и сокращение его длины за счет демпферного устройства 16, а также рассеивание кинематической энергии, накопленной механической рукой 14. При дальнейшем повороте кулачка 1 подъемно-поворотный вал 3, опускаясь .элементом 18 через фрикционную накладку 20, пластину 19, плиту 21, вту лки 25 сжинает пружины 23,, увеличивая тем самым силу торможения, чем затормаживает себя и механическую руку 4 с захватом 5. Шатун 15 подвер гается снижению, т.е. ведет коромысло 9 до момента остановки подъемноповоротного вала 3. По достижении крайнего положения механической руки 4 пальцевый фиксатор 8 начинает взаимодействовать с ловителем 7 и фиксирует механическую руку 4, а кулачок Ю продолжает поворачиваться на угол оС (или при этом шатун 15 изменяет св.ою длину за счет демпферного устройства 16 поскольку коромысло 9 неподвижно, а подъемно-поворотный вал 3, механичес кая рука.4 с захватом 5 опускаются вертикально до расчетной отметки. Затем реверсивный привод 6 меняет направление своего движения и поврро та кулачка 10. Ролик 17, взаимодейст вуя с профилем одной из впадин 11 или 12, рычагом 13 перемещает подъемно-поворотный вал Q вверх. В определенный момент пальцевый фиксатор ff выходит из контакта с ловителем 7 ,шатун 15 достигает номинальной длины за счет изменения длины ,;, демпферного устройства 16. . Поскольку элемент 18 и пластина 1 19 продолжают взаимодействовать, просходит натяжение (выборка зазоров) инематической цепи кулачково-рычажного механизма. Затем эти детали выодят из контакта и шатун 15 разгонят подъемно-поворотный вал 3 до макимальной скорости. Далее цикл работы повторяется Если манипулятор оснащен двумя руками, то остановку механической руки 4 в промежутвчной точке позиционироания осуществляют следующим образом Одновременно с прекращением подачи сжатого воздуха в полость реверсивного привода 6 производят подачу сжатого воздуха через штуцер 26 под мембрану 22, которая взаимодействует с пластиной 19 и перемещает ее по втулкам 25 вверх, чем обеспечивается контакт фрикционной накладки 20 с элементом 18, внец1нее трение которых обеспечивает расслаивание кинетической энергии, накопленной реверсивнЕлл приводом 6 и механическими руками 4. Происходит быстрая и надежная остановка, механической руки 4. При подаче сигнала на дальнейшее движение механических рук 4 полость под мембраной 22 соединяется с атмосферой через штуцер 26, а в рабочую полость привода 6 подаётся сжатый воздух. Пластина 19 опускается, а подъемно-поворотный вал 2 растормаживается и разгоняется реверсивным приводом 6 в нужном направлении. Работа манипулятора с исполнением привода фрикционной муфты по второму варианту осуществляется следующим образом. Одновременно с прекращением подачи сжатого возду;;е-в рабочую полость реверсивного прицода 6 производят подачу сжатого воздуха через штуцер .26 в сильфон 27,который изменяется,взаймодействует с пластиной 19,перемещая ее вверх по втулкам 25 и обеспечивая контакт фрикционной накладки 20 с элементом 18.Происходит остановка механической руки,4. При подаче сигнала на дальне1Ьаее движение сильфон 7 соединяется с атмосферой, пластина 19 опускается, подъемно-поворотный вал 3 растормаживается И разгоняется реверсивным приводом 6 в нужном направлении. Предлагаемый манипулятор обладает высркой производительностью за счет исключения влияния зазоров в кинематической цепи и гашения инерционных 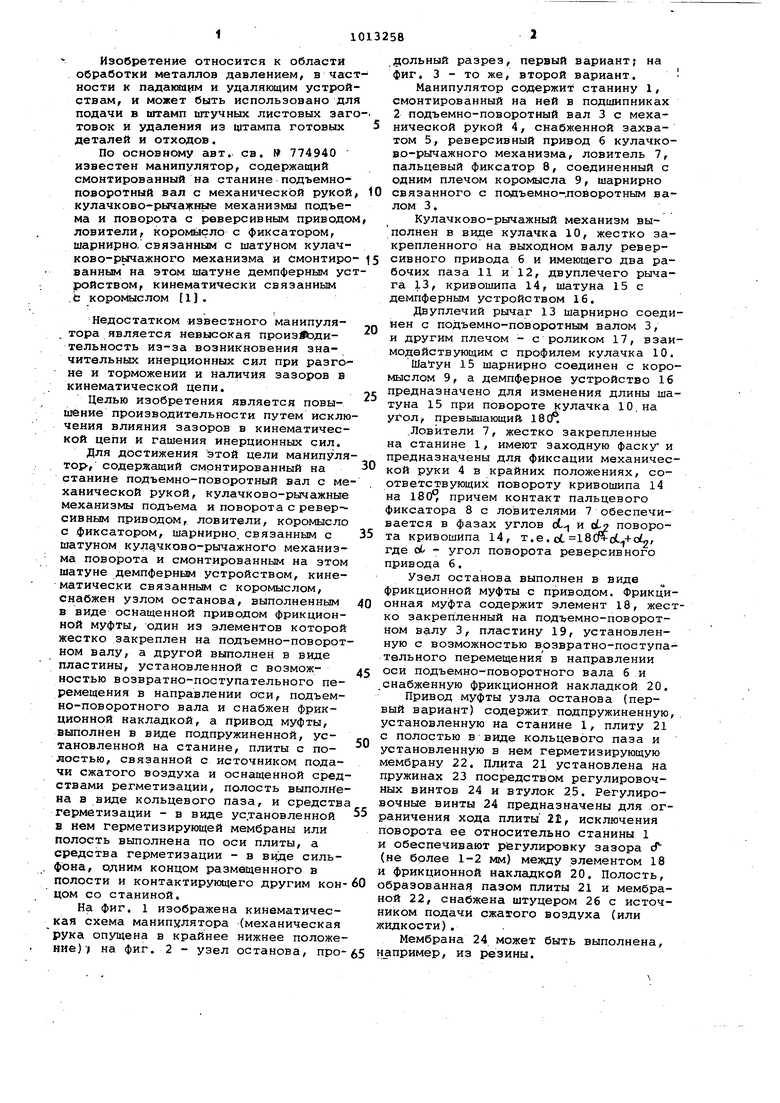
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU774940A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Манипулятор | 1978 |
|
SU727422A1 |
| Манипулятор | 1978 |
|
SU751618A1 |
| Манипулятор | 1985 |
|
SU1301686A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2206479C2 |
| Манипулятор | 1982 |
|
SU1061985A1 |
| Рабочий ротор | 1990 |
|
SU1756115A2 |
1..МАНИПУЛЯТОР по авт. св. 774940, отличающийся тем, что, с целью повышения производительности путем исключения влияния зазоров .в кинематической цепи и гашения инерционных сил, н снабжен узлом останова, выполненным в виде осна|1ценной приводом фрикционной муФты, один из элементов которой жестко закреплен на подъемно-поворотном валу, а другой выполнен в виде пластины, установленной с возможностью возвратно-поступательного перемещения в направлении оси подъемно-поступательного вала и снабженной фрикционной наклгщкой, а привод муфты выполнен в виде подпружиненной установленной на станине, плиты с полостью, связанной с источником подачи сжатого воздуха и оснащенной средствами герметизации. 2.Манипулятор по п. 1, отличающийся тем, что полость выполнена .в виде кольцевого паза, а средства герметизации - в виде установленной в нем мембраны. i 3.Манипулятор по п. 1, отличающийся тем, что полость вы(Л полнена по оси плиты, а средства герметизации выполнены в виде сильфона, одним концом размещенного в полости и контактирующего другим концом со станиной. со ю СП 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| (прототип). | |||
