(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для соединения в фальц боковин с обечайкой изделий -образной формы | 1975 |
|
SU559757A1 |
| Установка для обработки отверстий в крупногабаритных деталях | 1989 |
|
SU1708540A1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| УСТАНОВКА ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТУННЕЛЬНОЙ ПЕЧИ | 1989 |
|
RU2010869C1 |
| Манипулятор | 1986 |
|
SU1388175A1 |
| Устройство для простановки стержней | 1982 |
|
SU1036437A1 |
| Загрузочное устройство | 1982 |
|
SU1024223A2 |
| Устройство для загрузки и выгрузки изделий | 1989 |
|
SU1812409A1 |
| АГРЕГАТ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОЛУСУХИХ СТРОИТЕЛЬНЫХ СМЕСЕЙ | 2005 |
|
RU2279974C1 |

1
Изобретение относится к машиностроению и может найти применение при автоматизации технологических процессов термообработки изделий, например, отвалов плугов.
Известен манипулятор, содержащий ус- 5 тановленную на траверсе каретку с захватом, узел торможения и щуп 1.
Однако наличие в известном манипуляторе жестких упоров вызывает большие динамические нагрузки, а также делает невозможной точную установку захвата Ю относительно изделия, обусловленную погрешностью его положения при загрузке, что приводит, к снижению надежности работы манипулятора и ограничивает его технологические возможности.
Целью изобретения является повышение надежности работы и расширение технологических возможностей.
Поставленная цель-достигается тем, что захват шарнирно соединен с кареткой, а щуп жестко установлен на захвате, причем, jg щуп выполнен регулируемым.
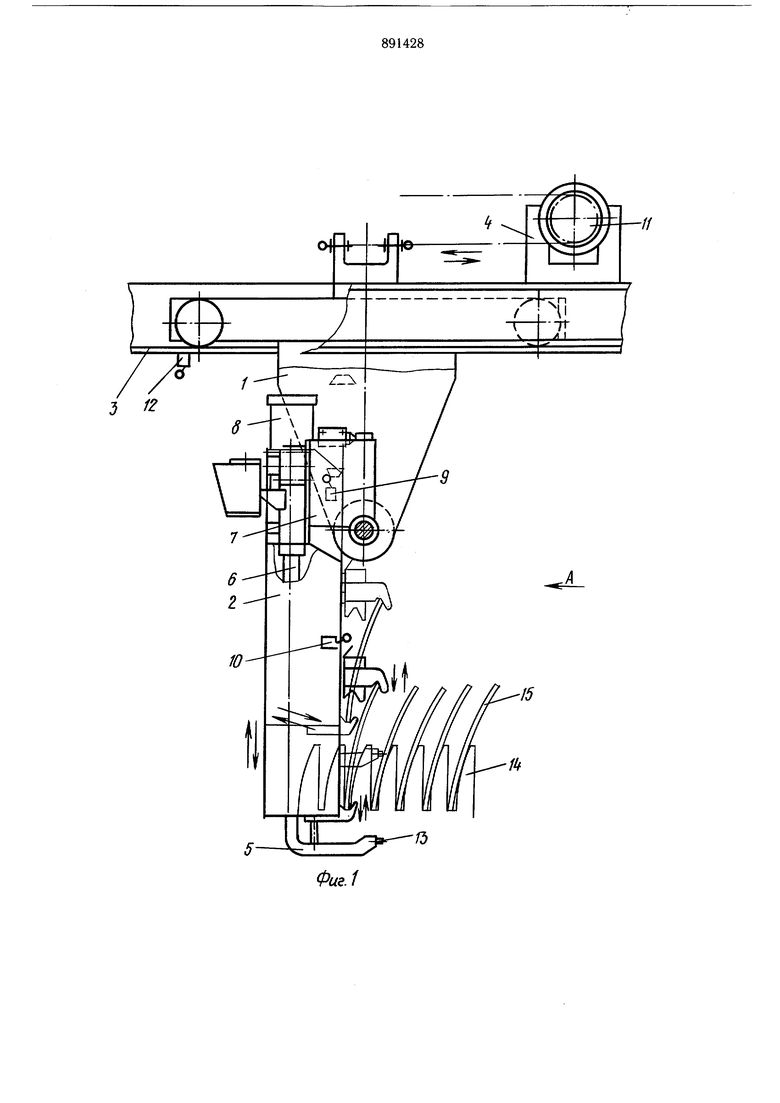
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1.
Манипулятор содержит каретку 1 с захватом 2, траверсу 3 для перемещения каретки 1, узел 4 торможения и щуп 5. Захват 2, соединенный посредством направляющих 6 с корпусом 7, шарнирно связан с кареткой 1. На корпусе 7 установлен силовой цилиндр 8 вертикального перемещения захвата 2. На каретке 1 установлен выключатель 9, а на захвате 2 - конечный выключатель 10, связанные с узлом 4 торможения и с приводом 11.
Конечный выключатель 9 служит одновременно для включения силового цилиндра 8 на опускание захвата 2. На траверсе 3 установлен путевой конечный выключатель 12, служащий для включения силового цилиндра 8 на подъем захвата 2 при обратном ходе каретки 1. Щуп 5 жестко связан с нижней частью захвата 2 и снабжен регулируемым упором 13.
Манипулятор работает следующим образом.
Допустим, необходимо перенести изделия, например отвал плуга, в зону укладки к загрузочному окну отпускного агрегата. Отпускной агрегат снабжен цепным конвейером 14, звенья цепи которого имеют равномерно расположенные гнезда. Для начала работы манипулятора в автоматическом режиме в одно из гнезд необходимо установить изделие 15 и отрегулировать длину щупа 5 в соответствии с шагом гнезд. Затем включается привод 11 каретки 1, которая перемещает изделие 15, зажатое захватом 2, из зоны загрузки в зону укладки, При подходе к ранее установленному изделию 15 щуп 5 упирается в него, а захват 2, щарнирно связанный с кареткой 1 через корпус 7, вместе с изделием 15 начинает отклоняться и тем самым замыкает конечный выключатель 9, который отключает привод 11 каретки 1 и включает узел 4 торможения. Каретка 1 останавливается, а зажатое в захвате 2 изделие 15 оказывается расположенным против соответствующего гнезда конвейера 14. Торможение каретки происходит плавно, без удара, и неточность останова каретки не влияет на точность расположения изделия над гнездом конвейера. Одновременно с помощью конечного выключателя 9 происходит включение силового цилиндра 8 вертикального перемещения захвата 2, и последний начинает опускаться. При этом щуп 5, как по копиру, скользит по ранее установленному изделию, точно направляя загружаемое изделие в очередное гнездо. Затем захват 2 освобождает изделие 15, и с помощью конечного выключателя 10 происходит включение привода 11 на движение каретки 1 на движение за следующим изделием. При движении каретки 1 с помощью путевого конечного выключателя 12 приводится в действие силовой цилиндр 8, осуществляющий подъем захвата 2. Каретка 1, продолжая движение, возвращается в зону загрузки, и цикл повторяется. Регулирование щупа 5 на заданный щаг расположения гнезд конвейера 14 осуществляется с помощью упора 13. Шарнирное соединение захвата с кареткой обусловливает плавное отклонение захвата при упоре щупа в ранее загруженное изделие, что обеспечивает плавное, без ударов торможение каретки. Жесткая установка щупа на нижней части захвата позволяет использовать ранее загруженное изделие в качестве упора, ограничивающего движение каретки. При этом каждое новое изделие устанавливается в следующее гнездо цепи конвейера, делая тем самым упор подвижным, смещающимся на щаг, что обеспечивает укладку изделий поочередно в гнезда любого многоместного приспособления. Все это повыщает надежность работы манипулятора и расщиряет его технологические возможности. Кроме того, выполнение щупа регулируемым позволяет легко перестроить манипулятор на необходимый щаг расположения изделий в гнездах приспособления, что повышает его универсальность. Формула изобретения 1.Манипулятор, содержащий установленную на траверсе каретку с захватом, узел торможения и щуп, отличающийся тем, что, с целью повышения надежности работы и расширения технологических возможностей, захват шарнирно соединен с кареткой, а щуп жестко установлен на захвате. 2.Манипулятор по п. 1, отличающийся тем, что щуп выполнен регулируемым. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 523797, кл. В 25 J 5/02, 1975.
Фиг.1
