(54) УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ МАШИНЫ ДЛЯ ВЬЕПРАВКИ ПУТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления исполнительным органом выправки железнодорожного пути в плане | 1982 |
|
SU1049604A1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| Устройство управления рабочим органом для выправки положения пути | 1980 |
|
SU966130A1 |
| Способ выправки пути в продольном профиле и плане и устройство для его осуществления | 1976 |
|
SU667623A1 |
| Путевая машина | 1971 |
|
SU667622A1 |
| Устройство для контроля положения железнодорожного пути | 1976 |
|
SU569681A1 |
| Устройство для управления исполнительным органом путевой машины | 1984 |
|
SU1349352A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| Устройство для выправки пути по уровню | 1986 |
|
SU1342961A1 |
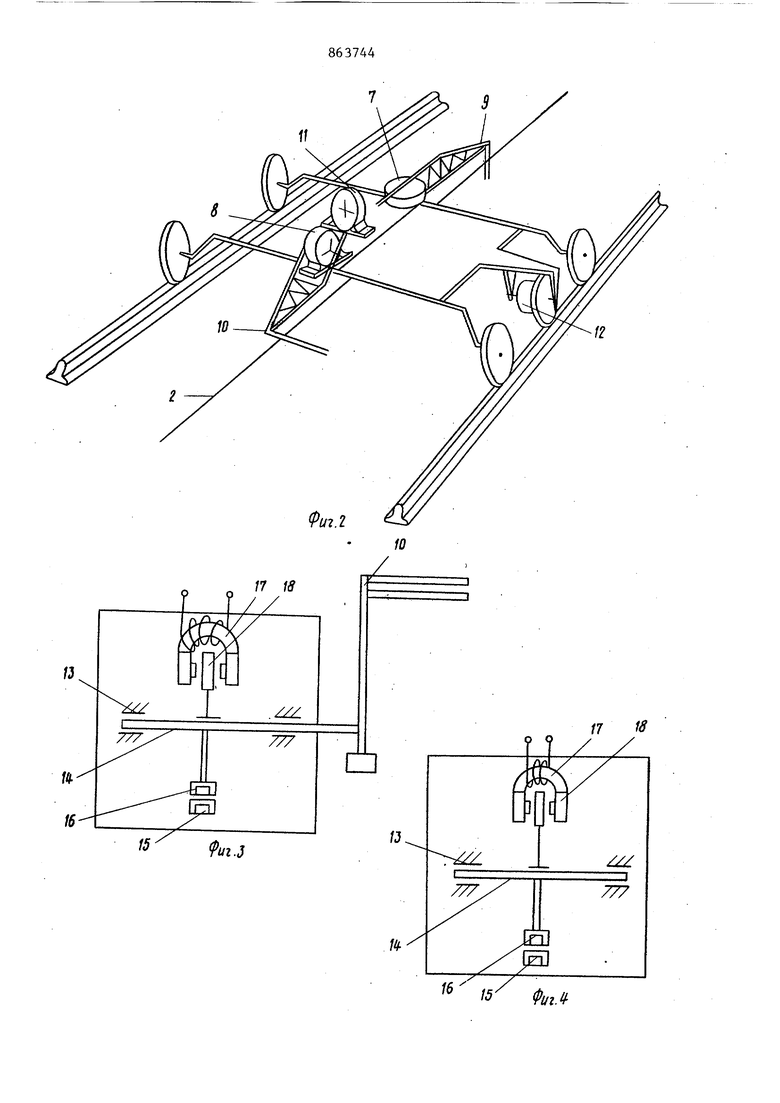


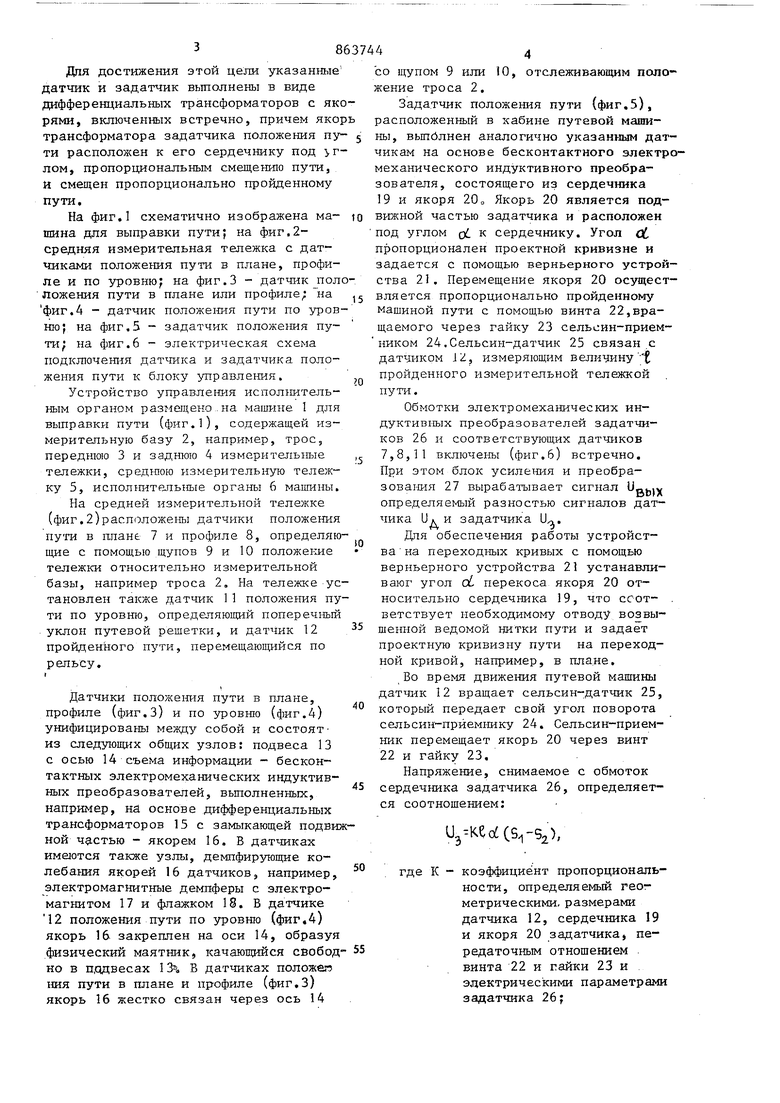
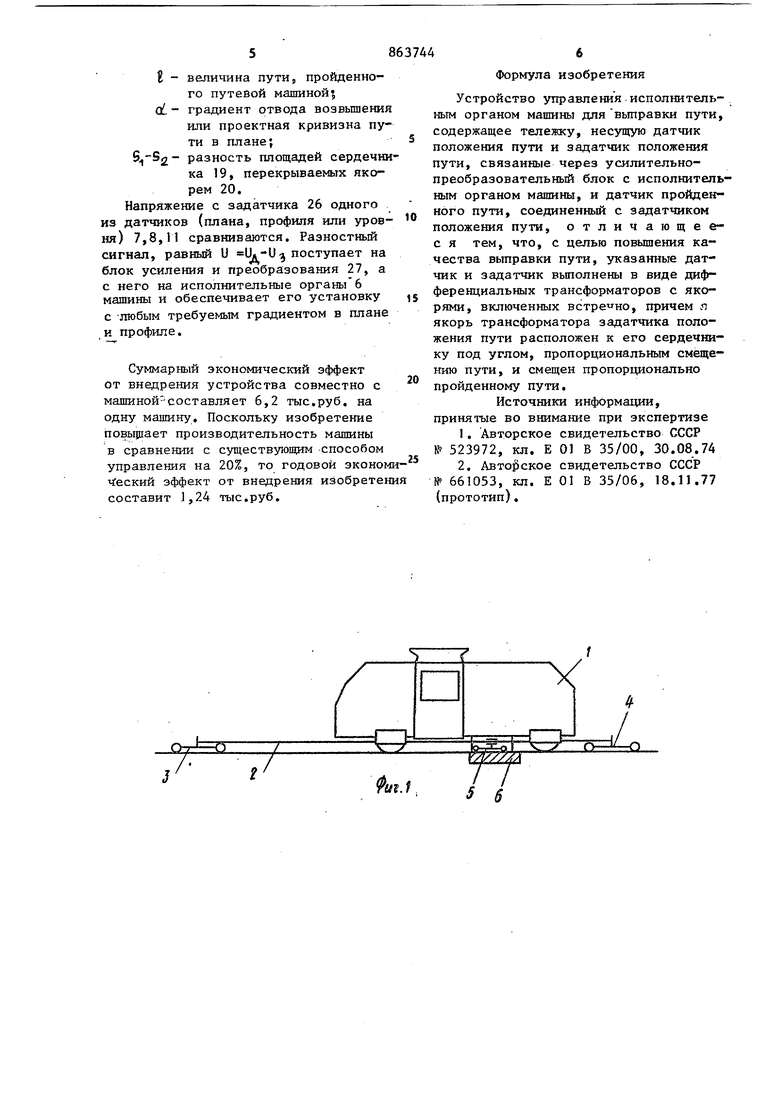
Изобретение относится к устройства для строительства и текущего содержания железнодорожного пути и предназначено для использования в системах автоматического управления машинами, осуществляющими выправку пути в плане и профиле. Известно устройство управления исполнительным органом машины для выправки пути, содержащее измерительную тележку, закрепленный на ней датчик положения пути по уровню, зада тчик его положения, связанные через усилительно-преобразовательный блок с исполнительным органом мапшны, и датчик пройденного пути, соединенный с указанным задатчиком 1 . Устройство позволяет задавать возвышение ведомой рельсовой железнодорожного пути для ограниченного числа кривых, а так как задатчик поло жения пути находится на раме измери тельной тележки, существенно з меньшается надежность и точность работы устройства. Известно также устройство управления исполнительным орпаном машины для вьтравки пути, содержащее тележку, несущую датчик положения пути и задатчик положения пути, связанные че- . рез усилительно-преобразовательный блок с исполнительным органом машины, и датчик пройденного пути, соединенный с задатчиком положения пути . Однако устройство расположено в зоне вибраций в непосредственной близости от исполнительных органов, что ухудшает качество выправки, точность работы устройства, повьгаает вероятность его отказа и делает практически невозможной точную настройку и регулировку в процессе работы путевой машины, так как элементы задатчика контактируют и кинематически связаны межцу собой. Цель изобретения - повьш1ение кат чества выправки пути. 38 Для достижения этой цели указан ше датчик и задатчик вьшолнены в виде дифференциальных трансформаторов с як рями, включенных встречно, причем яко трансформатора задатчика положения пу ти расположен к его сердечнику под г лом, пропорциональным смещению пути, И смещен пропорционально пройденному пути. На фиг,1 схематично изображена машина для выправки пути; на фиг.2средняя измерительная тележка с датчиками положения пути в плане, профиле и по уровню; на фиг.З - датчик пол пожения пути в плане или профиле; на фиг.4 - датчик положения пути по уров ню; на фиг,5 - задатчик положения пути; на фиг.6 - электрическая схема подключен датчика и задатчика положения пути к блоку управле1шя. Устройство управления исполнительным органом размещено, на машине. 1 для выправки пути (фнг.О, содержащей измерительную базу 2, например, трос, переднюю 3 и задгаою 4 измерителыпле тележки, средшою измерительную тележку 5, испольгительные органы 6 машины. На средней измерительной тележке (фиг.2)pacпoлoжeIiы датчики положения пути в ппане 7 и профиле 8, определяю щие с помощью щупов 9 и 10 положетше тележки относительно измерительной базы, например троса 2, На тележке ус тановлен также датчик 11 положения пу ти по уровню, определяющий поперечный уклон путевой решетки, и датчик 12 пройденного пути, перемещающийся по рельсу. Датчики положения пути в , профиле (фиг.З) и по уровню (фиг.4) унифицированы между собой и состоятиз следзлощих общих узлов: подвеса 13 с осью 14 съема информации - бесконтактных электромеханических индуктивных преобразователей, вьшолненных, например, ни основе дифференциальных трансформаторов 15 с замыкающей подви ной частью - якорем 16. В датчиках имеются также узлы, демпфирующие колебания якорей 16 датчиков, например, электромагнитные демпферы с электромагнитом 17 и флажком 18. В датчике 12 положения пути по уровню (фиг.4) якорь 16 закреплен на оси 14, образуя физический маятник, качающийся свобод но в п,одвесах 13, В датчиках положат ния пути в плане и профиле (фиг.З) якорь 16 жестко связан через ось 14 4 о щупом 9 или 10, отслеживающим полоение троса 2. Задатчик положения пути (фиг.5), асположенный в кабине путевой машиы, выполнен аналогично указанным датикам на основе бесконтактного электроеханического индуктивного преобраователя, состоящего из сердечника 19 и якоря 20о Якорь 20 является подижной частью задатчика и расположен под углом oi к сердечнику. Угол oL ропорционален проектной кривизне и задается с помощью верньерного устройства 21. Перемещение якоря 20 осуществляется пропорционально пройденному машиной пути с помощью винта 22,вращаемого через гайку 23 сельсин-приемником 24.Сельсин-датчик 25 связан с датчиком JZ, измеряющим вшшчину пройденного измерительной тележкой . пути. Обмотки электромеханических индуктивных преобразователей задатчиков 26 и соответствующих датчиков 7,8,11 включены (фиг.б) встречно. При этом блок усиления и преобразоват-шя 27 вырабататает сигнал определяемый разностью сигналов датчика UA и задатчика U. Для обеспечения работы устройства на переходных кривых с помощью верньерного устройства 21 устанавливаюг угол oL перекоса якоря 20 относительно сердечршка 19, что ссот- . ветствует необходимому отводу возвы- шегаюй ведомой нитки пути и задает проектную кривизну пути на переходной кривой, например, в плане. Во время движения путевой машины датчик 12 вращает сельсин-датчик 25, который передает свой угол поворота сельсин-прйем1-шку 24. Сельсин-приемник перемещает якорь 20 через винт 22 и гайку 23. Напряжение, снимаемое с обмоток сердечника задатчика 26, определяется соотнощением: u,( где К - коэффициент пропорциональности, опр ед еля емый г еог метрическими, размерами датчика 12, сердечника 19 и якоря 20 задатчика, передаточным отношением винта 22 и гайки 23 и электрическими параметрами задатчика 26; - величина пути, пройденного путевой машинойI oL градиент отвода возвышени или проектная кривизна пу ти в плане; ftj-Sg- разность площадей сердечн ка 19, перекрываемых якорем 20. Напряжение с задатчика 26 одного из датчиков (плана, профиля или урон ня) 7,8,11 сравниваются. Разностный сигнал, равный U U.-U поступает на блок усиления и преобразования 27, а с него на исполнительные органы 6 машины и обеспечивает его установку с -любым требуемым градиентом в плане и профиле. Суммарный экономический эффект от внедрения устройства совместно с машиной-составляет 6,2 тыс.руб. на одну машину. Поскольку изобретение повыщает производительность машины в сравнении с существзтощим способом управления на 20%, то годовой эконом ческий эффект от внедрения изобретен составит 1,24 тыс.руб. Формула изобретения Устройство управления исполнительным органом машины для вьтравки пути, содержащее тележку, несущую датчик положения пути и задатчик положения пути, связанные через усилительнопреобразовательный блок с исполнительным органом машины, и датчик пройденного пути, соединенный с задатчиком положения пути, отличающеес я тем, что, с целью повышения качества вьтравки пути, указанные датчик и задатчик вьитолнены в виде дифференциальных трансформаторов с якорями, включенных встречно, причем я якорь трансформатора задатчика положения пути расположен к его сердечнику под углом, пропорциональным смещению пути, и смещен пропорционально пройденному пути. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 523972, кл, Е 01 В 35/00, 30,08,74 2.Авторское свидетельство СССР № 661053, кл, Е 01 В 35/06, 18,11,77 (прототип),
р,,, h-g
/
YAf7/4A
«fj
5 6
Датчик
