(54) УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ
ПУТЕВОЙ ммаины
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления исполнительным органом путевой машины | 1982 |
|
SU1023020A1 |
| Путевая машина | 1982 |
|
SU1082891A1 |
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО для РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1973 |
|
SU405994A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Устройство управления исполнительным органом путевой машины | 1974 |
|
SU523972A1 |
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| Приспособление к путевым машинам для автоматического управления их рабочими органами | 1957 |
|
SU110473A1 |
| СПОСОБ ИЗМЕРЕНИЯ И ИЗОБРАЖЕНИЯ ГЕОМЕТРИИ ПУТИ СИСТЕМЫ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2682953C2 |
Изобретение относится к устройствам для строительства и ремонта железнодорожного пути и предназначено для использования в системе автоматического управления исполнительными рабочими органс1ми путевых машин при выполнении ими процесса выправки желез но-, дорожного пути в поперечной плоскости.
Известно устройство управления исполнительным органом путевой машины, содержащее тележку, смонтированные на ней датчик пройденного пути, включающий -в- себя мерное колесо, и датчик уклона пути, установленный на шарнирно закрепленной на тележке платформе и связанный с исполнительным органом 1.
Устройство не обеспечивает точного задания отвода возвышения рельсовой нити для всех возможных переходных кривых,так как предназначено для задания лишь нескольких величин отводов возвышения ведомой рельсовой нити (например: 0,67/1000,1/1000, 2/1000) по отношению к ведущей.В то же время при строительстве железнодорожного пути возможно изменение величин отвода возвышений в пределах от О
до 3/1000.
Известно также устройство управления исполнительным органом путевой
машины, содержащее тележку, каретку, шарнирно закрепленную на тележке, датчик уклона пути, установленный на каретке и связанный с исполнительным органом, и мерное колесо, смонтированное на тележке и связанное с кареткой через привод ее установки 2J .
10
Недостатки этого устройства связаны с отсутствием жесткой кинематической связи между мерным колесом и приводом перемещения каретки в вертикальной плоскости для задания воз15вышения ведомой рельсовой нити над ведущей в функции пройденного пути, что может привести к появлению и накоплению ошибок и искажению положения рельсовых нитей в поперечной
20 плоскости, а также с наличием потерь рабочего времени на вьшапнение расчетов для определения положения каретки в зависимости от длины переходной кривой, величины возвышения
25 рельсовой нити в конце переходной кривой и градиента отвода возвышений.
Указанные недостатки снижают эффективность устройства.
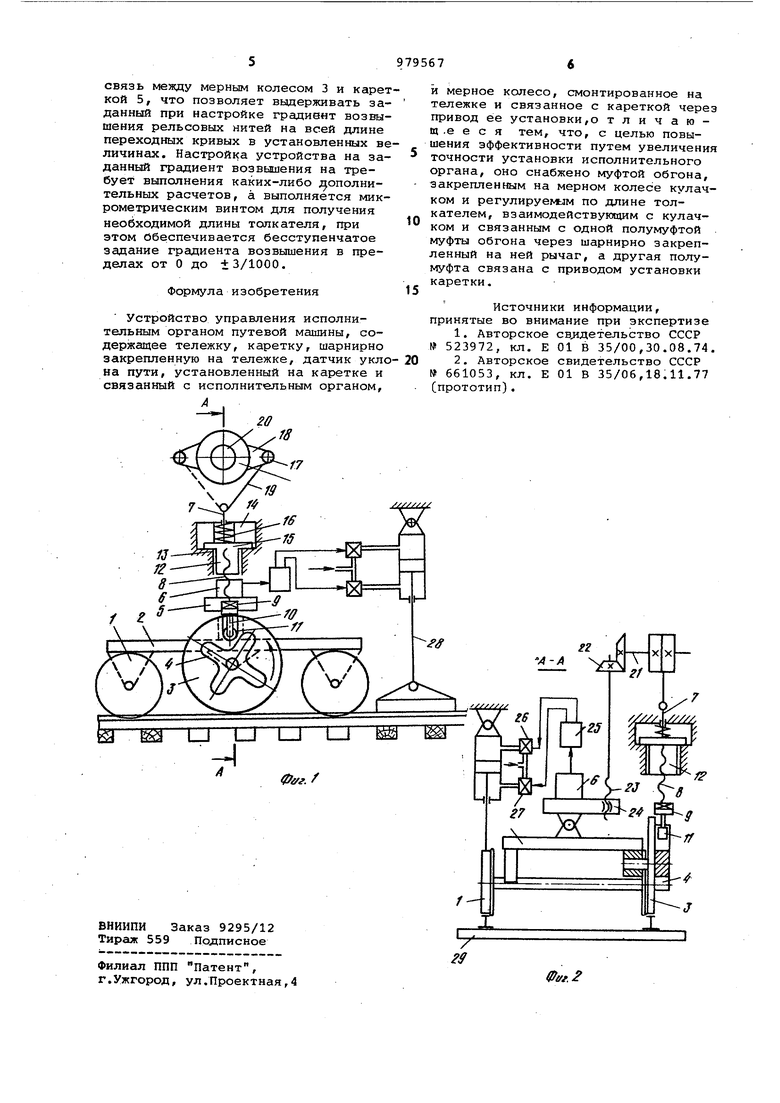
Цель изобретения - .повышение эф30фективности устройс ва путем увеличения точности установки исполнительного органа. Для достижения поставленной цели устройство управления исполнительным .органом путевой машины,содержащее те лежку, каретку,шарнир но закрепленную на тележке,датчик уклона пути,установленный на каретке и связанный с исполнительным органом,мерное колесо смонтированное на тележке и связанно с кареткой через привод ее установки снабжено муфтой обгона, закрепленным на мерном колесе -кулачком и регу лируемь1м по длине тол кат ел ем, взаимодействующим с кулачком и сВязанным с одной полумуфтой муфты обгона через шарнирно закрепленный па ней рычаг, а другая полумуфта связана с приводом установки каретки. На фиг. 1 схематически изображено устройство управления исполнительным органом путевой машины; на фиг. 2 - разрез А-А на фиг.1.. Устройство управления исполнитель ным органом путевой машины содержит измерительную тележку 1 с рамой 2, на которой закреплено мерное колесо 3, соединенное с кулачком 4. На раме 2 измерительной тележки 1 шарнирно закреплена каретка 5 со смонтированным на ней датчиком 6 уклона пути. С кулачком 4 взаимодействует регулируемый по длине толкатель 7, состоящий из микрометрического винта 8 с г ловкой 9, стойки 10 с. роликом 11, штосселя 12, перемещающегося в направляющих 13. Между неподвижной крышкой 14 и фланцем 15 штосселя 12 установлен упругий элемент 16, обеспечивающий движение толкателя вниз и прижатие ролика 11 „к кулачку 4. Одна полумуфта 17 муфты 18 обгона с помощью качающегося рычага 19 шарнирно соединена с регулируемым по длине толкателем 7. Другая полумуфт 20 муфты 18 обгона закреплена на валу 21, который через редуктор 22 и винт 23 с гайкой 24 соединена с кареткой 5.. Винт 23 с гайкой 24 представляет собой привод установки каретки. Сигнал с датчика б уклона пути через электронный усилительный блок 25и гидравлические распределители 26и 27 управляет движением исполнительного органа 28, изменяя положение рельсошпальной решетки 29. Заданием положения каретки 5 обе печивается требуемый отвод возвышени пути в переходных кривых, причем заданный градиент отвода возвыдения обеспечивается бесступенчатым изменением длины толкателя 7 путем регулировки микрометрического винта 8. Изменение длины толкателя 7 сопро вождается изменением величины его вертикального перемещения в результате взаимодействия ролика 11 с кулачком 4. Изменениенаправления перекоса каретки 5 обеспечивается размещением на валу муфты обгона с различным направлением рабочего хода ее полумуфт и изменением положения качающегося рычага 19 из нормального положения,как показано на фиг. 1, в положение, показанное пунктиром на той же фигуре. Во время движения измерительной тележки 1 совместно с путевой машиной происходит непрерывное вращение кулачка 4 совместно с мерным колесом 3. Вращающийся кулачок 4, взаимодействуя с роликом 11,заставляет толкатель 7 coBepuiaTb возвратно-поступательные движения, величина хода-которых зависит от первоначального градиента установки инкрометрического винта в зависимости от заданного градиента этврда возвышений в переходных кривых. Движения толкателя 7 через качающийся рычаг 19, полумуфты 17 и 20 муфты 18 обгона вызывают вращение вала 21, причем последний на всей длине переходной кривой вращается только в одну сторону, по часовой или против часовой стрелки. Движение вала 21 через редуктор 22 и винт 23 с гайкой 24 вызывает поворот каретки 5 вокруг шарнира, размещенного на раме 2 тележки 1. В.результате поворота каретки 5 на выходе датчика б появляется сигнал рассогласования и посредством усилительного электронного блока 25 через гидравлические распределители 26 и 27 подается соответствующая команда на перемещение исполнительного органа 28 вверх или вниз в зависикюсти от знака рассогласования. Исполнительный орган 28 перемещает рельсошпаловую решетку 29, на которой расположена измерительная тележка 1, создавая перекос пути в поперечной плоскости, равный заданному углу повЬрота каретки 5 относительно рамы 2 измерительной тележки 1, но противоположный по направлению. При этом сигнал на выходе датчика б исчезает и перемещение путевой рельсошпальной рещетки 29 прекращается. Таким Образом, устройство обеспечивает задание положения исполнительного органа 28 путевой машины с любой величиной отвода возвышения, например в диапазоне ± 3/1000 в функции длины пути, за счет бесступенчатой регулировки длины толкателя 7 с помощью микрометрического винта 8, что повышает точность установки исполнительного органа, а следовательно, эффективность устройства. В предлагаемом устройстве обеспечивается жесткая кинематическая
