Изобретение относится к автоматике и контрольно-измерительной технике и может быть применено для путевого контроля линейно перемещающихся элементов станков и приборов, а также для измерения длин. Известны системы путевого контроля линейного перемещения рабочего органа, содержащие линейный индукционный датчик с винтовым сердечником, кинематически связанным с приводом, и круговой датчик угла вращения винтопого сердечника ij. Известные системы обладают большим быстродействием, так как используют для путевого контроля непосредственно сигналы, вьцэабатьшаемые обоими датчиками. Однако вырабатываемый индукционным датчиком сигнал в значительной сте пени зависит от колебаний величины питающего напряжения, точности изготовления профиля резьбы головки и ее сборки. Стабилизация напряжения питания дат чика усложняет конструкцию, а получение точного профиля резьбы головки связано с преодолением технологических трудностей, обусловленньрс необходимостью абразивной обработки мягкого и вязкого материала ее элементов, Поэтому точность профиля резьбы головки сравнительно невелика, а величина погрешностей системы при измерении перемощения рабочего органа достигает существенного значения. Вследствие этого упомянутая система не может быть использована в прецизионных станках и приборах. Для получения более высокой точности измерения используются системы путевого контроля, в индукционный датчик охвачен обратной связью по возникающему в нем сигналу рассогласования. Измерения с помощью этой системы производятся тогда, когда величина напряжения на выходе индукционного датчика равна нулю, а точность измерения не зависит от колебаний питающего напряжения. Не влияют на точность измерения
3 .7
и погрешности профиля резьбы головки индукционного датчика.
Наиболее близкой к предлагаемой по технической сущности является система путевого контроля, содержащая линейный индукционный датчик, измерительная головка которого укреплена на рабочем органе и подключена к блоку согласования, а винтовой сердечник установлен в подпружиненной осевой и жесткой радиальной опорах и кинематически соединен с винтом привода рабочего органа и с валом приводного электродвигателя, подключенного через блок управления и арифметический блок к датчику угла пово рота, ротор которого соединен с винтовым сердечником 2.
наличия зазоров в кинематической цепи, связьюающей серводвигатель с винтовым сердечником, вся обратная связь не обладает необходимой чувствительностью, а следовательно, и быстродействием. В результате этого при сравнительно большой скорости движения, например при холостых перемещениях
рабочего органа машины или при работе на высоких подачах, не может быть осуществлено точное слежение винтовым сердечником движения измерительной головки, загфепленной на рабочем органе. Поэтому точность путевого контроля снижена. Для получения необходимой точности позицион фЬвания рабочего рр/в на с использованием такой системы пу тевого контроля при его подходе ,гк. заданной позиции на сравнительно большом участке пути скорость его движения снижают. Это существенно увеличивает время позиционирования, а следовательно, и производительность машины..
Цель изобретения - повышение быстро действия и точности работы системы,
Указанная цель достигается тем что система путевого контроля линейного перемещения рабочего органа содержит дополнительную пружину, электромагнит, обмотка которого подключена к выходу блока согласования, и два опорных коль ца с треугольными пазами на сопряженных торцах, в KOTOpbiX уложены корректирующие шарики, одно из опорных колец жестко закреплено на осевой опфе, а другое установлено на оси винтового сердечника и с помощью поводка и вилок кинематчгчески соединено с Koptiyсом датчика угла поворота, с сердечником электромагнита и с дополнЕтельной пружиной, свободный конец которой Соединен с корпусом системы.
2.4
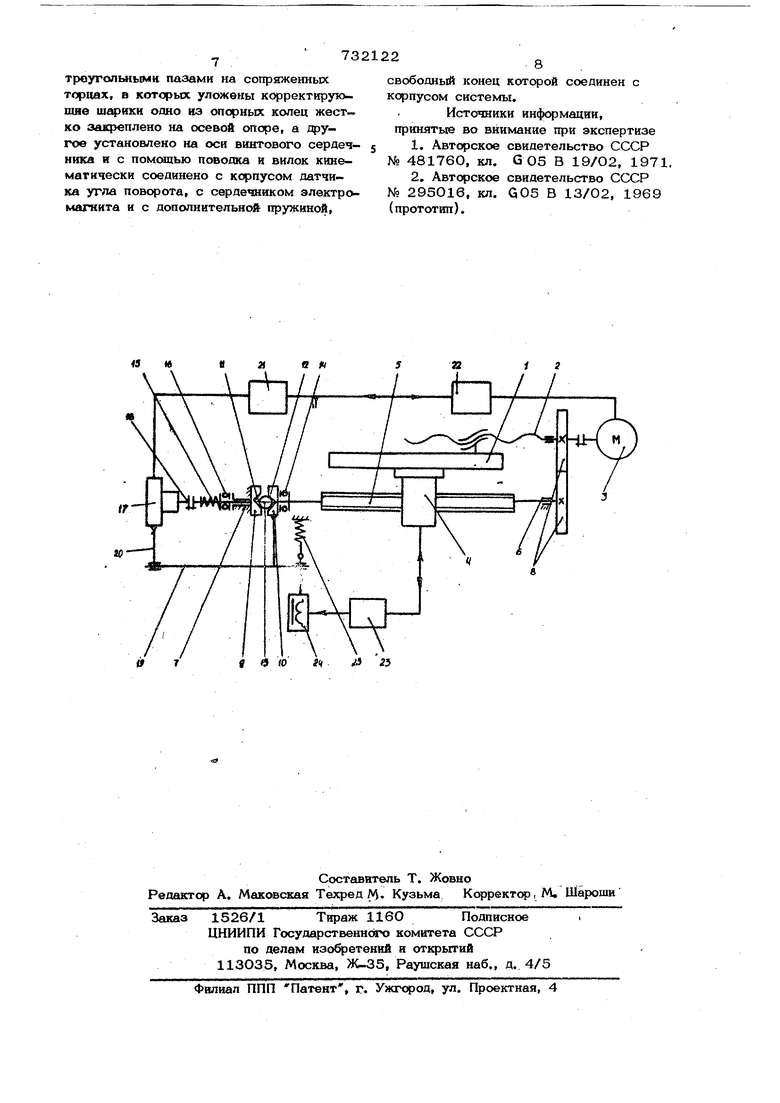
На чертеже схематически изображен ариант исполнения предлагаемой .системы. Рабочий орган 1 снабжен приводом лиейного перемещения, который содержит инт 2, жестко связанный с приводным лектродвигателем 3. На рабочем органе 1 закреплена измерительная головка 4 инейного ИНДУ1ЩИОННОГО датчика. Винтоой сердечник 5 этого датчика установлен в радиальной опоре 6 и осевой опое 7, которые закреплены на неподвижной части машины. С помощью цилиндрических зубчатых колес 8 сердечник 5 кинематически соединен с винтом 2. На осевой опоре 7 соосно с сердечником 5 становлены опорные кольца 9 и 10, .на опряженных торцах в которых выпопне1 у радиально треугольные гтазы 11 и 12 и в них, касаясь середины боковой поверхности, уложены корректирующие шарики 13. Через подшипник 14 сердечник 5 прижат к опорному кольцу 10. Прижим осуществляется под действием пружины 15, установленной на сердечнике 5 по другую сторону опоры 7. Пружина 15 одним концом через подшипник 16 упи-. рается в опору 7, а другим в бурт сердечника 5. Датчик 17 угла поворота установлен соосно с сердечником 5, а его ротор 18 жестко соединен с последним. Корпус датчика 17 с помощью поводка 19 и вилки 20 связан с кольцом 10.
Датчик 17 электрически связан с арифметическим блоком 21, к которому через блок 22 управления подключен приводной электродвигатель 3. , Из мерительная головка 4 индукционного датчика электрически связана через блок 23 согласования с обмоткой электромагнита 24, шарнирно соединенного с повомком 19, котфый шарнирно связан с дополнительной пружиной 25, другой конец которой закреплен на корпусе системы.
Перемещение рабочего органа 1 осуществляется винтом 2, приводимым во вращение электродвигателем 3. Одновременно через зубчатые колеса 8 вращение передается винтовому сердечнику 5. Это обеспечивает примерно одинаковый воздушный зазор между витками резьбы сердечника 5 и головки 4, в результате чего напряжение на выходе головки 4 равно нулю. При этом связанный с головкой 4 блок 23 согласования удерживает яксзрь электро1у1агнита 24 в среднем положении, который в свою очередь с помощью поводка 19 удерживает кольцо 10 так, что корректирующие шарики 13 касаются приблизительно середины наклонных 57 поверхностей пазов 11 и 12. Одновре менно с помощью вилки 20 удерживает ся в среднем положении корпус датчика 17, ротор 18 которого синхронно вращается с винтовым сердечником 5. Возни в датчике 17 сигнал пропорциона лен углу поворота сердечника 5. Так как величина угла его поворота при одинаковом воздушном зазоре между витками его резьбы и резьбы головки 4 соответствует величине линейного перемещения рабочего органа 1, сигнал, вырабатываемый датчиком 17, является информацией 66 этой величине иЪередается в арифметический блок 21, который через блок 22 управляет частотой вращения электродвигателя 3. В случае, когда при движении рабочего органа 1 в индукционном датчике изменяется величина воздушного зазора между витками резьбы головки 4 и сердечника 5, например, вследствие неточности в шаге винта 2 или из-за кинематических погрешностей колес 8, в измерительной головке 4 возникает напряжение, Пол фность этого напряжения за-, висит от того, опережает или отстает головка 4 от витков резьбы сердечника 5, Величина напряжения пропорциональна степени изменения воздушного зазора. С помощью блока 23 согласования это напряжение выводит якорь электромагнита 24 из среднего положения, кото рый через поводок 19 поворачивает опор ное кольцо 10. При этом корректирующие шарики 13 перекатываются по наклонным боковым плоскостям пазов 11 и 12, рас стояние между опорными кольцами 9 и Ю изменяется, и сердечник 5 перемещается вдоль своей оси так, что между витками его резьбы и резьбы головки 4 устанавливается воздушный зазор прежней величины, а величина напряжения в измерительной головке 4 уменьшается до нуля. Таким образом, напряжение на вь5ходе индукционного датчика постоянно поддерживается равным нулю и обеспечивает при движении головки 4 поддержание постоянного зазора между витками его резьбы и резьбы сердечника 5. В результате этого сердечник 5 постоянно следит за фактическим перемещением головки 4. Одновременно поводок 19 поворачивает с помощью вилки 2О корпус датчика 17. Вращение корпуса вызьюает в датчике 17 сигнар пропорциональньй .перемещению сердечника 5 вдоль его оси а одновременное вращение якоря 18 при226водит к появлению в датчике 17 суммарного сигнала, пропорционального линейному перемещению головки 4, которое тождественно лин ейному перемещению рабочего органа 1. В цепи обратной связи индукционного датчика отсутствуют , что значительно повышает чувствительность этой цепи, а следовательно, и ее быстродействие. Повышению быстродействия обратной связи способствует также применение в качестве исполнительного органа на выходе цепи электромагнита взамен серводввгател я, имеющего более высокую инерционность. Это позволяет значительно сократить время переходных процессов. Более высокое быстродействие цепи обратной связи, охватывающей индукционный датчик повышает быстродействие всей системы путевого контроля, так как датчик является элементом системьи Благодаря повышению чувствительности цепи обратной связи повышается также точность измерения величины перемещения рабочего органа во врекш его движения, т.е. точность путевого контроля, что позволяет, в свою очередь, например при использовании системы на станках типа обрабатывающий центр, производи ь точные фрезерные работы, а с другой - со1фатить время позиционирования, т.е. поднять производительность станка. Формула изобретения Система путевого контроля линейного перемещения рабочего органа, содержащая линейный индукционньгй датчик, измерительная головка которого укреплена на рабочем органе и подключена к блоку согласования, а винтовой сердечник установлен в подпружиненной осевой и жесткой радиальной опорах и кинематически соединен с винтом привода рабочего органа и с валом приводного электродвигателя, подключенного через блок, управления и арифметический блок к датчику угла поворота, ротор которого соединен с винтовым сердечником, отличающаяся тем, что, с целью повышения быстродействия и точности работы системы, она содержит дополнительную пружину, электромагн.ит, обмот ка которого подключена к выходу блока согласования, и два опорных кольца с
троуголы{ыми пазами на сотфяженных торцах, в которых уложены корректируюшяе шарики одно нэ опорньсс колец жест- ко закреплено на осевой опоре, а другое установлено на оси винтового сердечника и с помсядью поводка и вилок кинематически соединено с корпусом датчика угла поворота, с сердечником электромагнита и с дополнительной пружиной.
свободный конец которой соединен с корпусом системы.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 481760, кл. GO5 В 19/О2, 1971.
2,Авторское свидетельство СССР № 295О16, кл. G05 В 13/02, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
| Прибор для контроля ходовых винтов станков | 1981 |
|
SU986613A1 |
| Барометрический датчик высоты летательного аппарата | 1987 |
|
SU1527496A1 |
| КОПИРОВАЛЬНЫЙ ЩУП С ТРЕХКООРДИНАТНОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ УПРАВЛЕНИЯ ИЗМЕРЕНИЕМ | 1991 |
|
RU2025649C1 |
| Станок для изготовления по модели объемных изделий сложной формы | 1980 |
|
SU918116A1 |
| КОЛЕБАТЕЛЬНЫЙ СТРУКТУРОМЕТР | 2016 |
|
RU2625535C1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| ДЕФЕКТОСКОПНАЯ ТЕЛЕЖКА ДЛЯ СОВМЕЩЕННОГО МАГНИТНОГО И УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2225308C2 |
| ПРЕЦИЗИОННАЯ ЭЛЕКТРОИНДУКТИВНАЯ ОТСЧЕТНО- ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1971 |
|
SU295016A1 |
