1
Изобретение относится к области машиностроения, а именно к манипуляторам для в зонах радиоактивного излучения, под водой, в космосе и т.д., где требуется обратная связь по усилию схвата.
Известен манипулятор с обратной связью по усилию, в котором информация об усилии на губках получается от установленных в зоне схвата датчиков.
Предлагаемый манипулятор отличается от известного тем, что, с целью повышения надежности и точности соответствия усилий на задающем и исполнительном механизмах, кинематическая связь губок с силовым ЦИЛИНДР
ром и с датчиками выполнена в виде зубчатой рейки, установленной на цГтоке этого цилиндра с возможностью перемещения и подпружиненной в сторону рабочего хода губок, а один на датчиков обратной связи соединен со штоком.
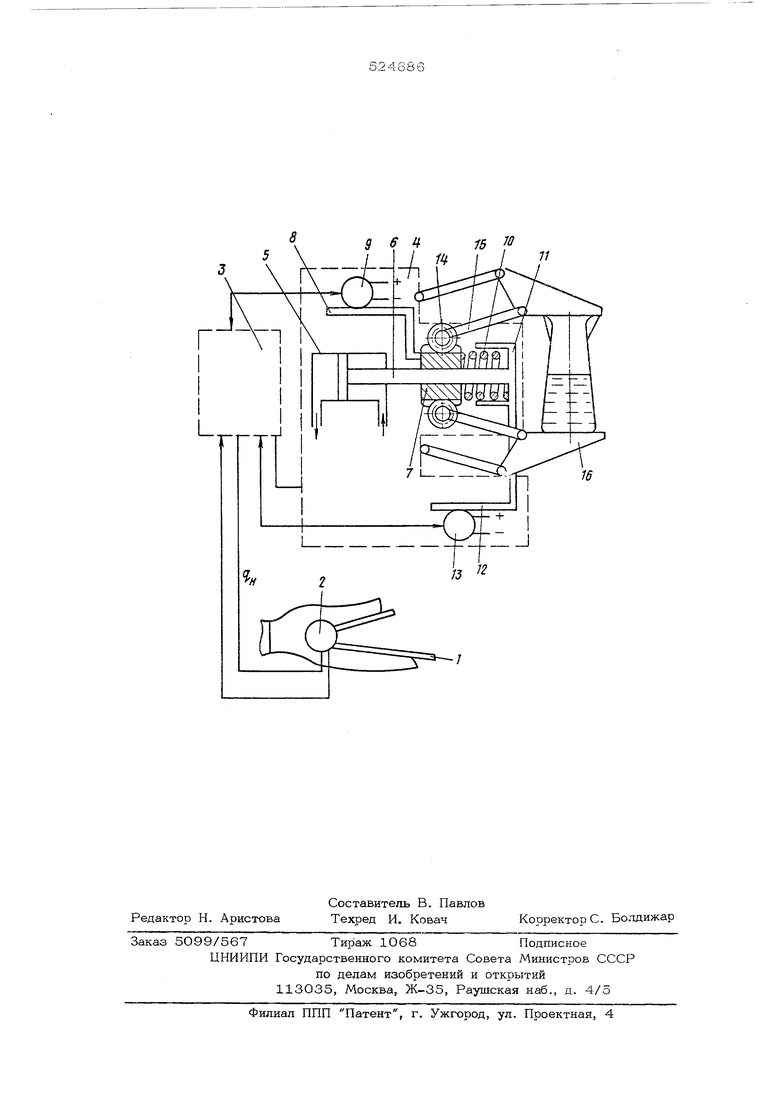
На чертеж изображен описьгааемый манипулятор с захватом, имеющим обратные. связи по усилию.
Манипулятор состоит из задающего мехализма 1, имеющего загружатель 2 для соз-
Дания тормозящего усилия, воспринимаемого рукой оператора, электронного блока 3, связанного исполнительным механизмом 4 с силовым цилиндром 5, на щтоке 6 которого установлена с возможностью перемещения зубчатая рейка 7, связанная тягой 8 с датчиком положения 9. Осевой упор штока 6 и рейки 7 осуществлен пружиной 1О, установленной в стакане 11, связанном тягой 1.2. с датчиком хода 13. Шестерни 14, сцепленные с рейкой 7, соединены рычагами 15с губками 16 захвата.
Работает манипулятор следующим образом
Поворотом задающего механизма 1 оператор через электронный блок 3 вьщает управляющий сигнал на исполнительный механизм 4 в результате чего гидрожидкость подается под порщень гидроцилиндра, заставляя его перемещаться влево. Одновременно перемещается щток вместе со стаканом 11. При этом стакан 11 давит на пружину 10, а та в свою очередь на рейку 7, заставляя ее перемещаться, поворачивая щестерни 14 и закрывая губки 16 захвата. Одновременно с этим с датчика положения 9, связанного тягой 8 с рейкой 7, вьщается сигнал, пропорциональный перемещению рейки, в электронный блок 3 по каналу управления положением захвата. Таким образом, датчик положения 9 действует в данном случае как датчик обратной связи по положению в следящем гидроприводе. Если между губками 16 нет ника кого предмета, то они закрываются беспрепятственно. При этом стакан 11 и рейка 7 имеют одинаковый ход и связанные с ними датчики 9 и 13 вьщают одинаковые сигналы Суммируясь в электронном блоке 3 на выходе, сигналы с датчиков формируют сигнал О, , подаваемый в задающий механизм 1 на загружатель 2. Таким образом, оператор не будет чувствовать усилия на захвате. В тех случаях, когда между губками 16 оказывается какой-либо предмет, они начинают его обжимать. При этом движение гу- бок 16, шестерен 14 и соответственно рей-ки 7 прекращается, а шток 6 и стакан 11 продолжают двигаться, сжимая пружину 10. В результате чего появляется разность ходов рейки 7 и стакана 11, а соответствен- но сигналов с датчиков 9 и 13. Суммируясь в электронном блоке, сигналы с датчиков 9 и 13 формируют сигнал i пропорциональ ный степени сжатия пружины Ю и соответственно величине усилия на губках 16. Поступая в задающий механизм 1 на загружа- тель 2, сигнал н вызывает в нем тормозящий момент, воспринимаемый рукой оп рагора. Ввиду того, что работа с хрупкими объек тами требует усилий сжатия от нуля до 81О, кг, осуществлять захват на большие усилия не имеет смысла. В тех случаях, когда требуется проводить работы с тяжелым объектом, оператор вьщает сигнал управления, преодолевая усилие тормозящего момента в загружателе. Отрабатьюая этот сигнал, гидропривод ходом штока выбирает весь прогиб пружины. Стакан прижимается-к рейке-и вся мощность гидроцилиндра передается полностью на губки. При этом на загружатель выдается постоянный сигнал 1 „ ; Датчик хода практически исключается из работы, а датчик положения работает только как датчик обратной связи по положению, формируя в электронном блоке сигнал Cj в следящую систему. Формула изобретения Манипулятор, содержащий задающий механизм с обратной связью по усилию и исполнительный механизм, например, с рычажным захватом, губки которого кинематически связаны со штоком силового цилиндра и с датчиками обратной связи, отличающийс я тем, что, с целью повыщения надежности и точности соответствия усилий на задающем и исполнительном механизмах, кинематическая связь губок с силовым цилиндром и с датчиками выполнена- в виде зубчатой рейки, установленной на щтоке этого цилиндра с возможностью перемещения и подпружиненной в сторону рабочего хода губок, а один из датчиков обратной связи соединен со щтоком.
/5 0
71
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захват | 1980 |
|
SU905061A1 |