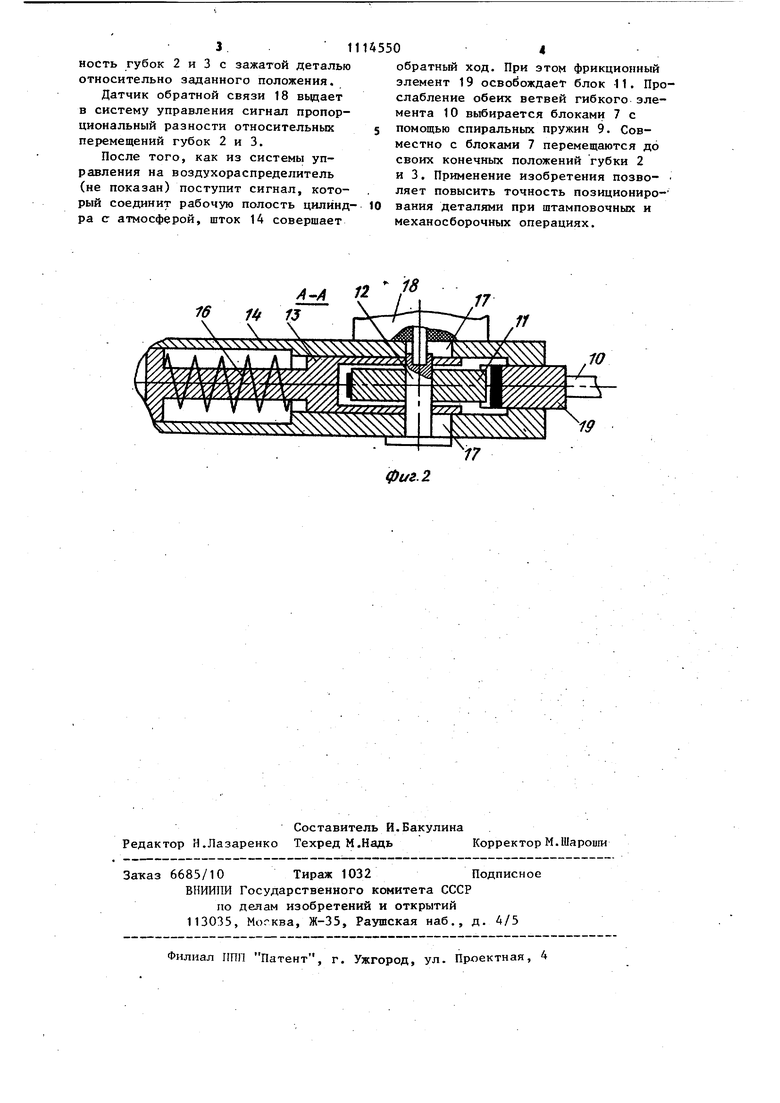
Изобретение относится к машиностроению и может быть использовано в манипуляторах и робототехнических устройствах. По основному авт. св. № 9621852 известен захват промыпшенного робота, содержащий корпус, ведущие звенья, тяги, зажимные губки, суммирующий механизм в виде гибкого элемента и системы блоков, охваченных этим гибким элементом, причем два блока суммирующего механизма жестко связаны с ведущими звеньями, а третий шарнирно установлен на штоке силового цилиндра и связан с датчиком обратной связи СП. Недостатком данного устройства является то, что губки с зажатой деталью имеют возможность отклон ть ся от положения позиционирования в результате действия сил инерции, так как блоки, связанные с ведущими звеньями, могут поворачиваться в одном направлении и гибкий элемент через блок, шарнирно закрепленный на штоке, может сматываться с одног блока, связанного с ведущим звеном наматываться на другой. Целью изобретения является Повышение точности позиционирования. Поставленная цель достигается тем, что захЪат промышленного {робота, содержащий Корпус, ведущие звен тяги, зажимные губки, суммирующий механизм в виде гибкого элемента и системы блоков, охваченных этим гибким элементом, причем два блока суммирующего механизма жестко связа с ведущими звеньями, а третий шарнирно установлен на штоке силового цилиндра и связан с датчиком обратной связи, снабжен вилкой и фрикционным элементом, при этом в штоке силового цилиндра выполнен паз, в котором с одной стороны установлен фрикционный элемент, а с другой с возможностью продольного перемеще ния и периодического взаимодействия с последним установлена вилка, несущая блок суммирующего механизма. На фиг. 1 изображен захват промы ленного робота, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1. Захват промышленного робота состоит из корпуса 1, зажимньк губок 2 и 3, соединенных с ним с помощью шарнирных многозвенников, выполненных из ведуш 1Х звеньев 4 и тяг 5. Каждое ведущее звено 4 составляет единое целое с полукорпусом 6 блока 7, составленного из двух таких полукорпусов, жестко соединенных друг с другом. Блок 7 установлен в корпусе Iна неподвижной оси 8 с возможностью поворота. Внутри него расположена возвратная спиральная пружина 9, К наружным поверхностям блока 7 крепится гибкий элемент 10, петля которого охватьшает третий блок 11, закрепленный с возможностью поворота на оси 12, установленной в вилке 13, находящейся с одной стороны паза штока 14 силового цилиндра 15. Вилка 13 подпружинена пружиной 16 относительно штока 14 и имеет возможность продольного перемещения. От проворота вилки 13 предохраняют выступы оси 12, находяшиеся в пазах 17 штока 14. С блоком 11 кинематически связан датчик 18 обратной связи. С другой стороны внутренней поверхности паза, выполненного в штоке 14, закреплен фрикционный элемент 19, выполненный, например, в виде полукольца. Захват промышленного робота работает следующим образом. Рабочая .среда, поступая в правую (по чертежу) полость силового цилиндра 15, перемещает шток 14. Блок I1перемещается вместе со штоком и воздействует с равным усилием на обе ветви гибкого элемента 10, который, воздействуя на блоки 7, заставляет зажимные губки 2 и 3 совершать взаимно параллельное движение. Когда одна из губок, например губка 2, касается поверхности первой детали, она останавливается. Блок 11 начин ет обкатываться своей поверхностью по неподвижной ветви гибкого элемента 10, воздействуя при этом на вторую ветвь гибкого элемента. Блок 7, связанный с этой ветвью, поворачиваясь через ведущие звенья 4 и тягу 5, перемещают зажимную губку 3 с удвоенной скоростью до захвата детали. При этом блок 11 вместе с вилкой 13 останавл 1вается. Перемещаясь .далее, шток 14 сжимаеет пружину 16 и движется по пазу 17 относительно неподвижной вилки 13 до касания блоком 11 фрикционного элемента 19. Последний жестко фиксирует блок 11, предохраняя его от поворота, что обеспечивает неподвиж311
ность губок 2 и 3 с зажатой деталью относительно заданного положения.
Датчик обратной связи 18 вьдает в систему управления сигнал пропорциональный разности относительных перемещений губок 2 и 3.
После того, как из системы управления на воздухораспределитель (не показан) поступит сигнал, который соединит рабочую полость цилиндра с атмосферой, шток 14 совершает
45504
обратный ход. При этом фрикционный элемент 19 освобождает блок 11. Прослабление обеих ветвей гибкого элемента 10 выбирается блоками 7 с 5 помощью спиральных пружин 9. Совместно с блокеши 7 перемещаются до своих конечных положений губки 2 и 3, Применение изобретения позво- ляет повысить точность позициониро10 вания деталями при штамповочных и механосборочных операциях.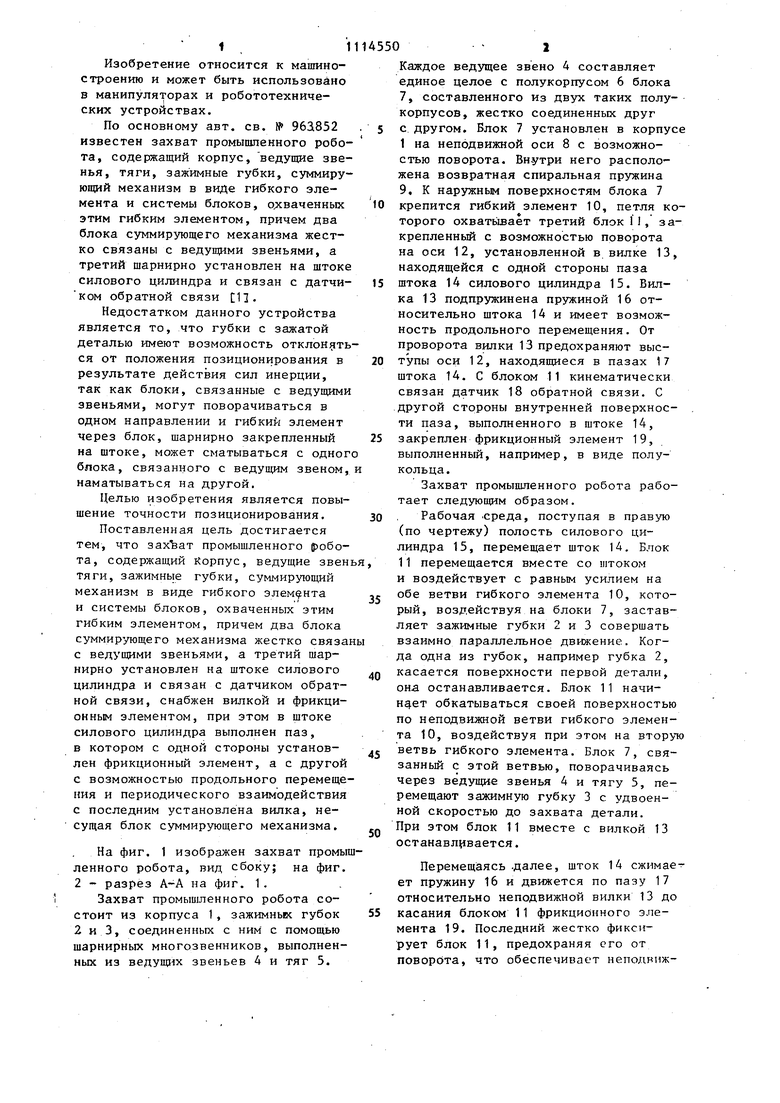
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захват промышленного робота | 1985 |
|
SU1315300A1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1986 |
|
SU1316816A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Захват манипулятора | 1979 |
|
SU837859A1 |
| Захват манипулятора | 1990 |
|
SU1834796A3 |
ЗАХВАТ IlPO fЫШЛEHHOГO РОБОТА по авт. св. № 963852, о т л и ч « ю щ и и с я тем, что, с целью повышения точности позиционирования, он снабжен вилкой и фрикционным элементом, при этом в штоке силового цилиндра выполнен паз, в котором с одной стороны установлен фрикционный элемент, а с другой с возможностью продольного перемещения и периодического взаимодействия с последним установлена вилка, несущая блок суммирующего механизма. 8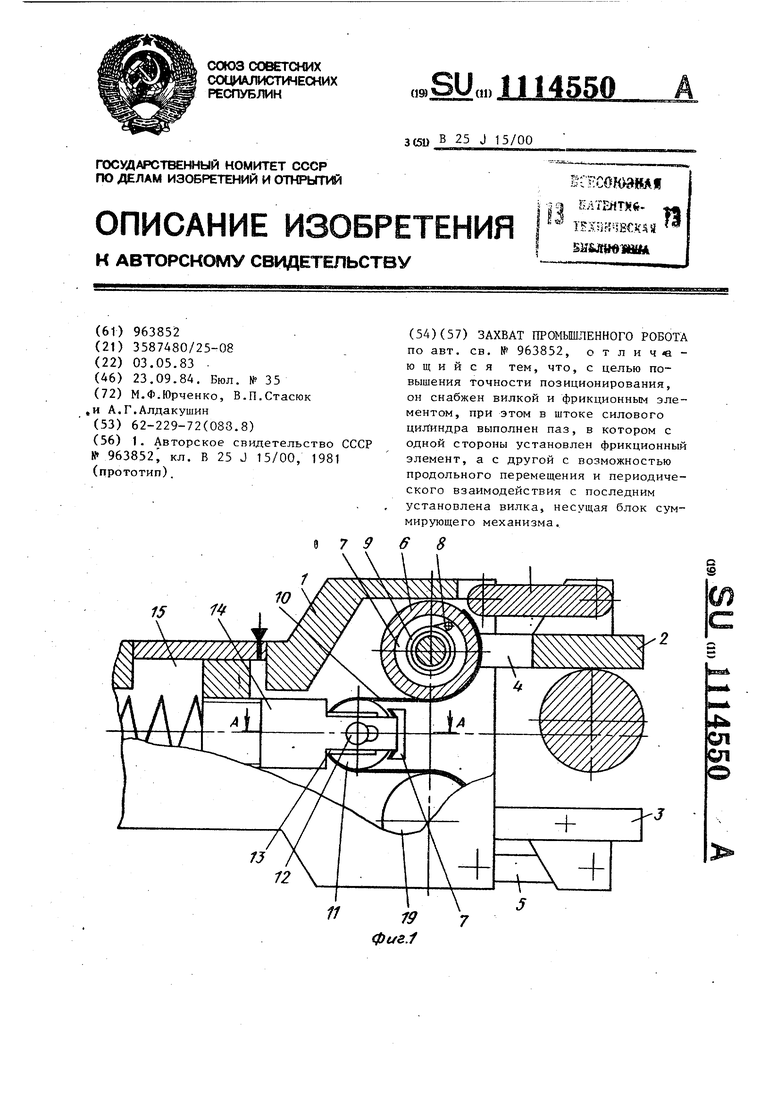
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Ножницы для автоматической разрезки металлических полос с приспособлением для контроля развески кусков | 1921 |
|
SU796A1 |
