1
Изобретение относится к захватным устройствам, применяемым в манипуляторах для захвата и перемещения различных предметов, в частности деталей, имеющих форму тел вращения.
Известен захват содержащий три зажимных элемента с приводом их перемещения, смонтированные на корпусе и связанные между собой зубчатой передачей 1.
Недостатком известного устройства является сложность конструкции и ограниченность длин зажимаемых деталей.
Цель изобретения - упрощение конструкции захвата и увеличение диапазона длин зажимаемых заготовок.
Цель достигается тем, что захват снабжен свободно расположенной на штоке силового цилиндра подпружиненной траверсой и щарнирно связанной с зажимными губками через дополнительное звено. Кроме того, зажимные элементы несут на себе рейки .с регулируемыми губками.
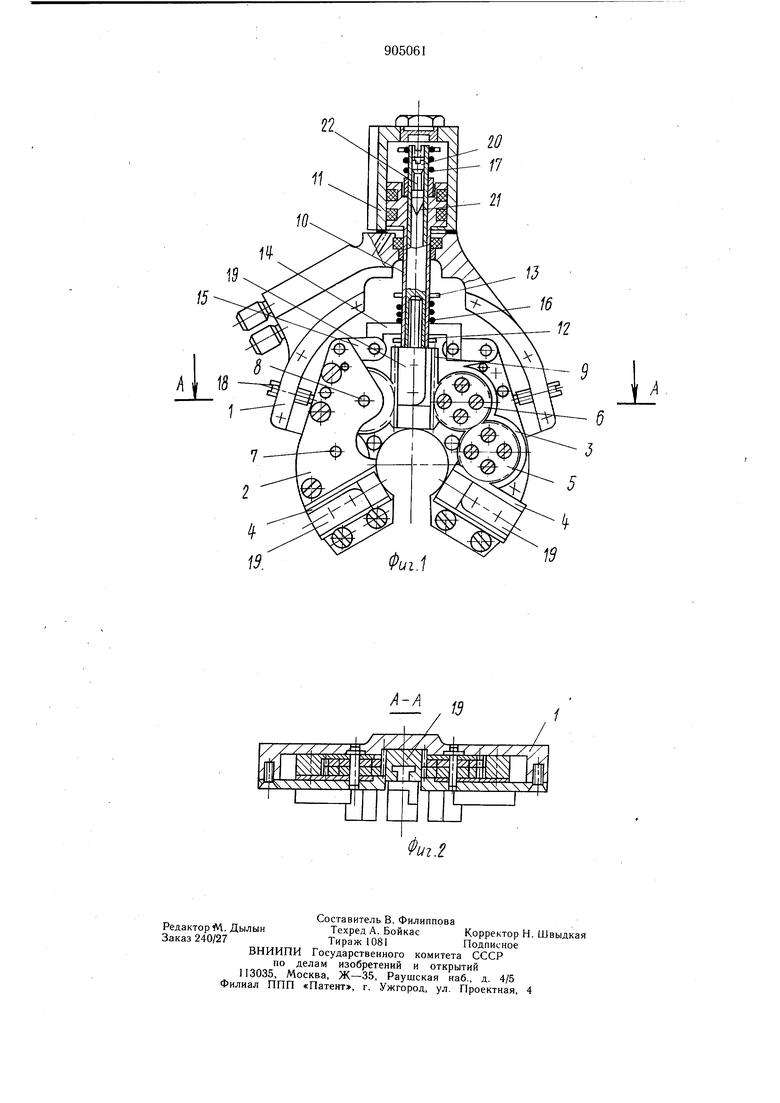
На фиг. 1 показан предлагаемый захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
(54) ЗАХВАТ
Захват содержит корпус 1, зажимные элементы 2 и 3 с расположенными на них рейками 4, связанными посредством пар зубчатых колес 5 и 6, установленных на осях 7 и 8 с приводной рейкой 9, сидящей на 5 штоке 10 силового привода 11, например пневмоцилиндра.
На щтоке 10 привода закреплены упоры 12 и 13, между которыми расположена траверса 14, щар 1ирно связанная с зажимными 10 элементами 2 и 3 через дополнительное звено 15. На штоке установлена также пру жина 16 между траверсой 14 и упором 13. И пружина 17 для обратного хода поршня силового цилиндра. На корпусе захвата установлены винты 18, ограничивающие пово 5 рот зажимных элементов. На рейках 4 и 9 закреплены с возможностью регулировки з жимные губки 19. Винт 20 и щарики 21 расположены в расточке тяги 22, имеющей на своем конце шлиц. 20 Захват работает следующим образом.
При работе захвата с деталями типа «фланец (зажим захватом с торца) винты 18 ввертываются до упора в зажимные элементы 2 и 3 и исключают возможность их поворота. Шток 10 жестко соединен с тягой 22 при помощи шариков 21 и винта 20 с коническим концом. При подаче сжатого воздуха в верхнюю полость пневмоцилиндра поршень вместе со штоком 10 перемещается вниз. Установленная на конце штока 10 рейка 9, с закрепленной на ней губкой 19, взаимодействуя сдвумя парами колес 5 и 6, перемещает в радиальном направлении зубчатые рейки 4, с губками 19 к центру детали. Одновременное перемещение всех трех элементов обеспечивает центрирование и зажим детали. Величина перемещения определяется сжатием пружины 16. Затем воздух подают во вторую полость пневмоцилиндра, шток 10 с рейкой 9 перемещается вверх и губки захвата расходятся. При работе захвата с деталями типа «вал (с поджимом задним центром) винты 18 выворачивают, создавая возможность поворота зажимным элементам 2 и 3 вокруг оси 8 на величину, большую поперечного размера детали. Причем, оси 7 зубчатых колес 5 закреплены на рычагах. Тяга 22 расклинивается со штоком 10 винтом 20, ослабляя натяг шариков 21. При подаче воздуха в верхнюю полость пневмоцилиндра шток 10, перемещаясь вниз, через рейку 9, зубчатые колеса 5 и 6 и рейки 4 обеспечивает одинаковое перемещение губок 19 к центру детали. Одновременно с движением губок 19 упор 13 через пружину 16 передает усилие на траверсу 14, а та, в свою очередь, через звено 15 заставляет поворачиваться зажимные элементы 2 и 3. Поворот зажимных элементов заканчивается при установке в расклин траверсы 14 и звеньев 15. При дальнейшем движении поршня зажимные элементы 2 и 3 остаются неподвижными, а рейки 4 и 9 с губками 19 сходятся к центру захвата, зажимая вал. При подаче воздуха в нижнюю полость пневмоцилиндра поршень со штоком 10 перемещается вверх, раскрывая губки и выбирая зазор между упором 12 и траверсой 14. После того, как этот зазор выбран, упор 12 передает усилие со щтока на траверсу 14, а через нее и звено 15 поворачивает зажимные элементы 2 и 3 в сторону раскрытия от центра. При дальнейшем движении поршня со штоком 10 вверх тяга 22 упирается В корпус захвата 1 и останавливается, а порщень с полым штоком продолжает перемещаться вверх, сжимая пружину 17 до тех пор, пока зажимные элементы не раскроются на величину, большую поперечного размера детали; поворот зажимных рычагов регулируется ограничительными винтами 18. Наладка захвата на заданный размер производится вращением тяги 22 через шлиц, выполненный на торце тяги. По сравнению с известными захватными устройствами предлагаемый захват обеспечивает зажим деталей неограниченной длины и имеет простую конструкцию, что позволяет зажимать детали как захватом с торца, так и при работе с поджимом задним центром; при работе с таким захватом отпадает необходимость применения сменных захватов в заданном диапазоне диаметров и разных режимах захвата деталей. Захват обеспечивает простоту регулировки губок и простоту перепада с одного режима на другой (зажим захватом с торца или зажим захватом при работе с поджимом детали задним центром). Кроме того, рейки могут быть снабжены вращающимися роликами для захвата детали на ходу (при вращающемся шпинделе). Формула изобретения 1.Захват, содержащий зажи.мные элементы с приводом их перемещения, смонтированные на корпусе и связанные между собой зубчатой передачей, отличающийся тем, что, с целью упрощения конструкции захвата и увеличения диапазона длин зажимаемых заготовок, он снабжен свободно расположенной на штоке силового цилиндра подпружиненной траверсой и шарнирно связанной, с зажимными губками через дополнительно введенное звено. 2.Захват по п. 1, отличающийся тем, что зажимные элементы несут на себе рейки с регулируемы.ми, губками. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 566731, кл. В 25 J 15/00, 1977.
22
15
/J
16
12
9
19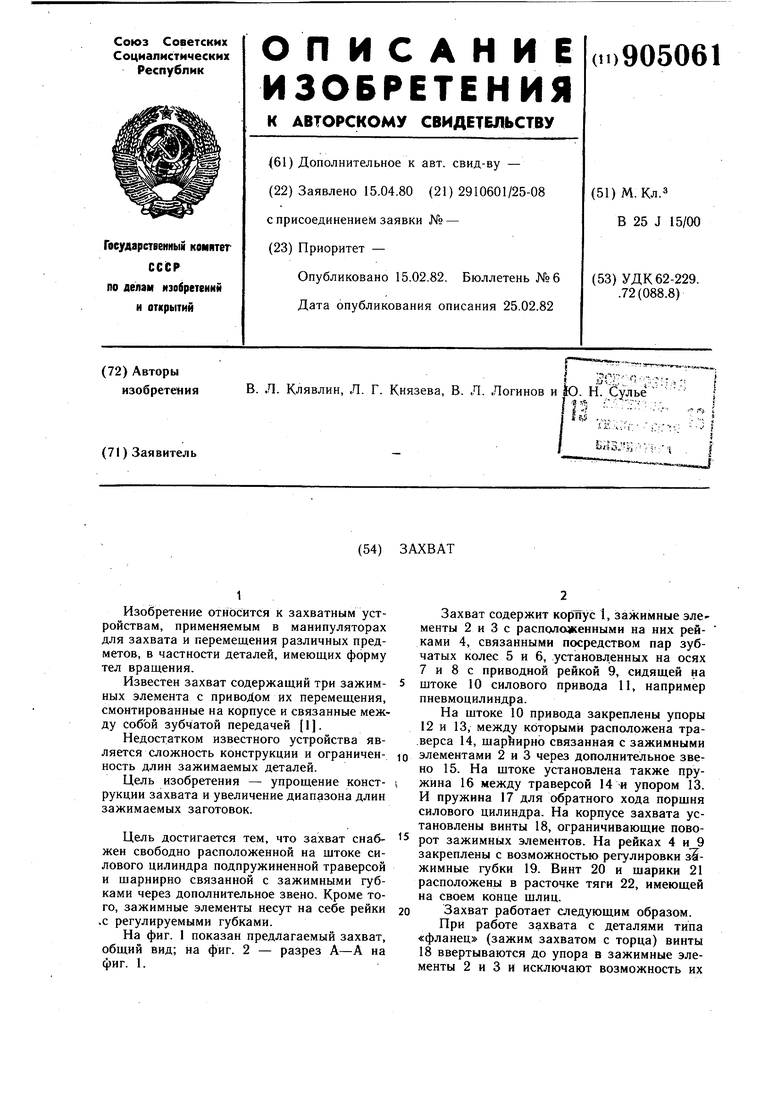
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Автомат для фрезерования пазов | 1981 |
|
SU1000177A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАКРЕПЛЕНИЯ ДЕТАЛЕЙ | 1994 |
|
RU2066611C1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Устройство для ориентации и зажима деталей под сварку | 1985 |
|
SU1311898A1 |
| Зажимное устройство | 1983 |
|
SU1155411A1 |